一种基于绳索变形分析的滑板表演装置姿态调整控制补偿算法的制作方法
1.本发明涉及表演装置姿态控制技术领域,尤其涉及一种基于绳索变形分析的滑板表演装置姿态调整控制补偿算法。
背景技术:
2.仿人形大滑板表演装置是一个边水平运行边垂直升降的表演道具,该滑板被悬挂在表演场所的轨道威亚上,其水平与竖直方向上各有两台电机且相同方向电机型号一致,来驱动绳索使其滑板进行动作变化。轨道威亚使用两根钢丝绳索从表演场地的北侧横跨到对面的南侧,在中央处的钢丝绳所由于受自身重力影响出现了肉眼可见的变形。由于两根主索系统安装位置、材质以及长度的等等都一致,因此我们简化计算,在后续的讨论中,只用其中之一做探究。
3.当悬挂滑板的仿人形滑板表演装置进行动作造型时,大部分是通过多次试验收放绳索长度在场地两端边沿以及中间的经验数值,从而获得由于变形造成的绳索变化值,以此来满足滑板表演装置在一定的时间内以一定的速度与高度来满足动作姿态滑板姿态调整时钢丝绳的长度值所需。但是该方法不但在时间上花费较多,且对人力资源也消耗较大。
技术实现要素:
4.本发明的目的在于提供一种基于绳索变形分析的滑板表演装置姿态调整控制补偿算法,从而解决现有技术中存在的前述问题。
5.为了实现上述目的,本发明采用的技术方案如下:
6.一种基于绳索变形分析的滑板表演装置姿态调整控制补偿算法,滑板表演装置包括钢丝绳索、升降绳索、滑板和拉力传感器;表演场地上方的露天顶层上设置有两组支撑架,每组支撑架上搭设有一条钢丝绳索,每条钢丝绳索上连接有一条升降绳索,两条升降绳索的下端分别经一升降电机与滑板的头部和尾部相连;每组支撑架包括平行且间隔设置的两个支撑柱,所述钢丝绳索的两端分别绕过两个支撑柱的顶端与收放电机相连,所述钢丝绳索的端部设置有拉力传感器;算法包括如下步骤,
7.s1、基于获取的钢丝绳索最大垂度变形参数以及滑板由于悬垂变形而在运动过程中调整竖直方向姿态所需要的补偿参数,确定滑板在表演空间中发生位置变化时,升降绳索在竖直方向上经补偿后要达到的真实长度;进而确定滑板在竖直方向上的姿态调整策略,即滑板竖直运动时,升降绳索的收放计算方式;
8.s2、基于滑板的长度与带动滑板水平方向移动的钢丝绳索长度的位置差,确定滑板在水平运动时姿态调整的距离;进而确定滑板在水平方向上的姿态调整策略,即滑板水平运动时,钢丝绳索的收放计算方式;
9.s3、结合滑板在竖直方向上的姿态调整策略以及滑板在水平方向上的姿态调整策略,根据表演要求,对滑板的姿态进行分解并控制钢丝绳索和升降绳索的收放长度比例,进
而实现滑板的造型动态变化。
10.优选的,步骤s1具体包括如下内容,
11.s11、获取钢丝绳索的最大垂度变形参数;
12.s12、基于钢丝绳索的最大垂度变形参数,获取滑板由于悬垂变形而在运动过程中调整竖直方向姿态所需要的补偿参数;
13.s13、基于补偿参数,获取滑板在表演空间内发生位置变化时,升降绳索在竖直方向上经补偿后要达到的真实长度。
14.优选的,步骤s11具体为,根据钢丝绳索的简化模型,获取钢丝绳索的最大垂度变形参数d;
[0015][0016]
其中,q为钢丝绳索每米的重力;g为重力加速度;l为同一组支撑架中两个支撑柱的顶端之间钢丝绳索横跨的长度值;t为滑板运动时钢丝绳索的拉力值,由拉力传感器获取,且满足下式,
[0017][0018]
其中,f为钢丝绳索的破断力;n为钢丝绳索的安全系数;k
θ
为温度变化的影响系数;k为钢丝绳索的拉力系数。
[0019]
优选的,步骤s12具体为,根据滑板水平移动的距离占据同一组支撑架中两个支撑柱的顶端之间钢丝绳索横跨的长度值的比例,得到滑板由于悬垂变形而在运动过程中调整竖直方向姿态所需的补偿参数;令滑板在水平方向上的运动距离为s,则升降绳索在竖直方向上收放的补偿参数为f;
[0020][0021]
其中,σ为经验参数;s取值越小,补偿参数f精度越高。
[0022]
优选的,步骤s13具体为,当要求滑板在表演空间内以不同位置出现,即从第一位置c1动态挪到第二位置c2,则升降绳索在竖直方向上经补偿后要达到的真实长度计算如下,
[0023][0024][0025][0026]
其中,c为第一位置c1和第二位置c2之间的第三位置;lv1、lv2、lv3分别为滑板在第一位置c1、第三位置c、第二位置c2处时升降绳索在竖直方向上经补偿后要达到的真实长度;h1、h2和h3分别为滑板在第一位置c1、第三位置c、第二位置c2处时升降绳索在竖直方向上的收放长度值;f1、f2和f3分别为滑板在第一位置c1、第三位置c、第二位置c2处时升降绳索在竖
直方向上收放的补偿参数;o1、o和o2分别为滑板在第一位置c1、第三位置c、第二位置c2处时升降绳索。
[0027]
优选的,步骤s2具体为,为了不影响升降绳索的收放长度,滑板水平运动时的姿态调整的距离要保持在一定的偏差,该偏差取决于滑板的长度与带动滑板在水平方向移动的收放绳索的位置差;
[0028]
|p
1-p2|-len≤δ
[0029]
其中,p1为滑板头部所连接的钢丝绳索的水平位置长度,p2为滑板尾部所连接的钢丝绳索的水平位置长度,δ为滑板在水平方向上头尾保持偏差的最大经验误差值;len为滑板的长度。
[0030]
本发明的有益效果是:本发明通过预测绳索长度,将绳索的误差反馈补偿至预测中,从预测开始,修正绳索的实际长度,从而使其控制姿态更加精准,解决了由于悬垂引起的控制精度不高的局面,提升了目标的控制精度,并改善了观感体验,为舞台盛宴的视觉效果提供了新的科技支持。
附图说明
[0031]
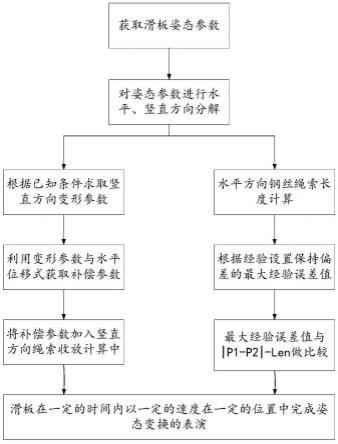
图1是本发明实施例中控制算法的技术路线图;
[0032]
图2是本发明实施例中滑板表演装置的结构示意图;
[0033]
图3是本发明实施例中滑板在表演空间中位置变化的示意图。
具体实施方式
[0034]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施方式仅仅用以解释本发明,并不用于限定本发明。
[0035]
如图1和图2所示,本实施例中,提供了一种基于绳索变形分析的滑板表演装置姿态调整控制补偿算法,滑板表演装置包括钢丝绳索、升降绳索、滑板和拉力传感器;表演场地上方的露天顶层上设置有两组支撑架,每组支撑架上搭设有一条钢丝绳索,每条钢丝绳索上连接有一条升降绳索,两条升降绳索的下端分别经一升降电机与滑板的头部和尾部相连;每组支撑架包括平行且间隔设置的两个支撑柱,所述钢丝绳索的两端分别绕过两个支撑柱的顶端与收放电机相连,所述钢丝绳索的端部设置有拉力传感器;
[0036]
如图1所示,ab为表演场地从北侧到南侧的第二索道钢丝绳索的示意图,aa’与bb’为表演场地所用支撑柱,a’b’为表演场地上方的露天顶层,ag’b表示无变形时钢丝绳索,agb表示由于变形引起的悬垂的钢丝绳索,gg’为钢丝绳索的跨中垂度,gc为悬挂滑板的升降绳索,d为滑板,ef为表演场地。拉力传感器安装在钢丝绳索端口处用于获取滑板在水平方向上任意动作造型时的拉力值。
[0037]
算法包括如下步骤,
[0038]
s1、基于获取的钢丝绳索最大垂度变形参数以及滑板由于悬垂变形而在运动过程中调整竖直方向姿态所需要的补偿参数,确定滑板在表演空间中发生位置变化时,升降绳索在竖直方向上经补偿后要达到的真实长度;进而确定滑板在竖直方向上的姿态调整策略,即滑板竖直运动时,升降绳索的收放计算方式;
[0039]
s2、基于滑板的长度与带动滑板水平方向移动的钢丝绳索长度的位置差,确定滑板在水平运动时姿态调整的距离;进而确定滑板在水平方向上的姿态调整策略,即滑板水平运动时,钢丝绳索的收放计算方式;
[0040]
s3、结合滑板在竖直方向上的姿态调整策略以及滑板在水平方向上的姿态调整策略,根据表演要求,对滑板的姿态进行分解并控制钢丝绳索和升降绳索的收放长度比例,进而实现滑板的造型动态变化。
[0041]
参见上述步骤,可以发现本发明算法主要包括三部分内容,分别是确定滑板在竖直方向上的姿态调整策略、确定滑板在水平方向上的姿态调整策略、实现滑板的造型动态变化;下面分别针对这三部分内容进行说明。
[0042]
一、确定滑板在竖直方向上的姿态调整策略
[0043]
该部分内容对应步骤s1,步骤s1具体包括如下内容,
[0044]
s11、获取钢丝绳索的最大垂度变形参数;
[0045]
具体的,根据钢丝绳索的简化模型,获取钢丝绳索的最大垂度变形参数d;
[0046][0047]
其中,q为钢丝绳索每米的重力;g为重力加速度;l为同一组支撑架中两个支撑柱的顶端之间钢丝绳索横跨的长度值;t为滑板运动时钢丝绳索的拉力值,由拉力传感器获取,且满足下式,
[0048][0049]
其中,f为钢丝绳索的破断力;n为钢丝绳索的安全系数;k
θ
为温度变化的影响系数;k为钢丝绳索的拉力系数。
[0050]
s12、基于钢丝绳索的最大垂度变形参数,获取滑板由于悬垂变形而在运动过程中调整竖直方向姿态所需要的补偿参数;也就是说在获取最大垂度变形参数后,即可根据滑板水平移动的距离占据ab的长度的比例,得到滑板由于悬垂变形而在运动过程中调整竖直方向姿态需要的补偿参数。
[0051]
具体的,根据滑板水平移动的距离占据同一组支撑架中两个支撑柱的顶端之间钢丝绳索横跨的长度值的比例,得到滑板由于悬垂变形而在运动过程中调整竖直方向姿态所需的补偿参数;令滑板在水平方向上的运动距离为s,则升降绳索在竖直方向上收放的补偿参数为f;
[0052][0053]
其中,σ为经验参数,根据实际的补偿情况做修正使用;s取值越小,补偿参数f精度越高。
[0054]
s13、基于补偿参数,获取滑板在表演空间内发生位置变化时,升降绳索在竖直方向上经补偿后要达到的真实长度。
[0055]
具体的,如图3所示,当要求滑板在表演空间内以不同位置出现,比如从第一位置c1动态挪到第二位置c2,则升降绳索在竖直方向上经补偿后要达到的真实长度计算如下,
[0056][0057][0058][0059]
其中,c为第一位置c1和第二位置c2之间的第三位置;lv1、lv2、lv3分别为滑板在第一位置c1、第三位置c、第二位置c2处时升降绳索在竖直方向上经补偿后要达到的真实长度;h1、h2和h3分别为滑板在第一位置c1、第三位置c、第二位置c2处时升降绳索在竖直方向上的收放长度值;f1、f2和f3分别为滑板在第一位置c1、第三位置c、第二位置c2处时升降绳索在竖直方向上收放的补偿参数;o1、o和o2分别为滑板在第一位置c1、第三位置c、第二位置c2处时升降绳索。
[0060]
二、确定滑板在水平方向上的姿态调整策略
[0061]
滑板在水平方向上是由北侧缓慢移动到南侧并在此过程中进行升降造型,水平方向的速度与位移影响着滑板姿态调整中的平稳与美观,如速度过快将导致滑板颤抖,位移不一致导致滑板的姿态角度倾斜,从而导致升降方向的位置精度控制不准确。滑板的大小size可表示为:
[0062]
size=len*thk*hei
[0063]
其中,len为滑板的长度,thk为滑板的厚度,hei为滑板的高度。
[0064]
为了不影响升降的收放绳索长度,在水平运动时滑板姿态调整的距离要保持一定的偏差,而其保持偏差的值取决于滑板的长度len与带动滑板水平方向移动的钢丝绳索的长度的位置差,公式如下,
[0065]
|p
1-p2|-len≤δ
[0066]
其中,p1为滑板头部所连接的钢丝绳索的水平位置长度,p2为滑板尾部所连接的钢丝绳索的水平位置长度,δ为滑板在水平方向上头尾保持偏差的最大经验误差值;len为滑板的长度。
[0067]
三、实现滑板的造型动态变化
[0068]
当获取滑板在表演空间竖直方向上和水平方向上的姿势调整策略后,即在水平与竖直方向采用不同的方法进行收放绳索计算;根据表演要求,对滑板进行姿态分解然后控制钢丝绳索和升降绳索的收放长度比例来实现造型动态变化。
[0069]
本实施例中,本发明算法利用钢丝绳索在水平方向上由于自重引起的大跨度变形分析,借助拉力传感器的参数值获得变形参数;然后根据演出所需的垂直高度值来计算升降绳索的长度,并将变形参数作为补偿参数与升降绳索长度进行融合来获取其变形下真实的绳索长度;最后利用滑板的大小来设置速度互锁信息里保证滑板表演装置在一定的时间内以一定的速度在一定的位置中完成表演。在上述步骤下,滑板姿态调整就会变得简单且快速,为该类项目的调试节省了较多的时间与人力。同时,由于变形造成的垂直高度位置不准而引起的控制精度位置不准问题,也得到了有效的解决。
[0070]
通过采用本发明公开的上述技术方案,得到了如下有益的效果:
[0071]
本发明提供了一种基于绳索变形分析的滑板表演装置姿态调整控制补偿算法,该方法通过预测绳索长度,将绳索的误差反馈补偿至预测中,从预测开始,修正绳索的实际长度,从而使其控制姿态更加精准,解决了由于悬垂引起的控制精度不高的局面,提升了目标的控制精度,并改善了观感体验,为舞台盛宴的视觉效果提供了新的科技支持。
[0072]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1