一种基于深度学习训练模型的工程叉车迁移学习系统
1.本发明涉及迁移学习系统技术领域,具体涉及一种基于深度学习训练模型的工程叉车迁移学习系统。
背景技术:
2.现代物流行业的发展使得流动式起重运输机械产量获得迅猛增长,而在流动式起重运输机械领域应用最为广泛的当属叉车。叉车是一种配备了货叉并能将货物举升到目标高度的特殊车辆。有时叉车也被归入工程机械。作为车辆,叉车与蓄电池搬运车、牵引车、翻斗车、agv小车等同属于工业车辆或装卸搬运车辆。其广泛应用于工厂、仓库、港口、机场等场地,实现了机械化装卸、堆垛和短距搬运,极大地提高了生产效率,是现代物流行业必不可少的设备。
3.现有的工程叉车因不具有迁移学习系统,导致工程叉车在使用时无法及时进行维护,导致工程叉车在使用时发生损坏,从而造成安全隐患。
技术实现要素:
4.本发明的目的在于提供一种基于深度学习训练模型的工程叉车迁移学习系统,通过数据分析模块对工程叉车钢叉的工作状态与使用寿命进行数据对比分析,得到工程叉车使用寿命的数据信息以及最佳更换时间,输出模块将数据结果输出,方便对工程叉车在实际使用时及时更换钢叉,确保工程叉车在使用时的安全性。
5.本发明的目的可以通过以下技术方案实现:
6.一种基于深度学习训练模型的工程叉车迁移学习系统,包括中央处理模块,中央处理模块用于处理整个系统的数据信息,并发送指令命令到各个处理模块中,用于控制系统的各个处理模块;
7.数据采集模块,用于采集工程叉车的各类数据信息;
8.模型搭建模块,用于搭建深度学习训练模型;
9.训练学习模块,利用模型搭建模块所搭建的深度学习训练模型,结合数据采集模块所采集的叉车数据信息,将数据信息与深度学习训练模型相结合,实现对叉车的训练学习。
10.作为本发明进一步的方案:还包括有数据分析模块,对训练学习模块获得的学习数据进行统计,同时分析数据采集模块中所采集的物理数据信息,对比分析获得叉车实际使用的最优数据信息;
11.输出模块,对系统的数据信息结构进行输出。
12.作为本发明进一步的方案:数据采集模块包括物理数据采集和仿真数据采集,物理数据采集为真实环境下工程叉车在实际工作过程中各类数据信息的采集,仿真数据采集为计算机仿真环境下,工程叉车在仿真模拟状态下各类数据的采集。
13.作为本发明进一步的方案:数据采集模块采集工程叉车的能源损耗数据和能源回
收数据,用于对工程叉车能源回收进行学习训练。
14.作为本发明进一步的方案:工程叉车能源回收包括叉车工作装置势能回收和叉车行走装置制动能回收。
15.作为本发明进一步的方案:数据采集模块采集工程叉车使用寿命数据,用于对工程叉车使用寿命进行学习训练,从而确定叉车易损件的更换时间。
16.作为本发明进一步的方案:该迁移学习系统具体工作流程为:
17.第一阶段为工程叉车仿真训练阶段,利用工程叉车仿真软件仿真得到计算机仿真样本,采用计算机仿真样本对预设的深度学习训练模型进行训练,得到第一阶段深度学习训练模型;
18.第二阶段为物理样本训练阶段,将第一阶段深度学习训练模型与预设深度学习训练模型进行模型融合,采用物理样本对融合后的深度学习训练模型进行训练,得到第二阶段深度学习训练模型,其中物理样本为数据采集模块所采集的物理数据信息样本;
19.第三阶段为混合样本训练阶段,将第二阶段深度学习训练模型与预设深度学习训练模型进行模型融合,采用计算机仿真样本和物理样本混合得到混合样本对融合后的深度学习训练模型进行训练,得到最终的深度学习训练模型,训练过程结束。
20.本发明的有益效果:
21.(1)通过数据分析模块对工程叉车钢叉的工作状态与使用寿命进行数据对比分析,得到工程叉车使用寿命的数据信息以及最佳更换时间,输出模块将数据结果输出,方便对工程叉车在实际使用时及时更换钢叉,确保工程叉车在使用时的安全性。
22.(2)通过系统得到工程叉车的节能数据信息,在叉车的液压系统中设计储能装置,以把升降装置下降过程中释放的势能存储起来并在上升时加以利用,提高能量利用效率,并同时达到使系统运行平稳、工作可靠、安全的目的,利用蓄能器将本该被制动系统转化为热能散失掉的能量回收起来,并在叉车再次加速时释放出来与发动机共同配合驱动叉车行驶,实现能量回收和再利用。
附图说明
23.下面结合附图对本发明作进一步的说明。
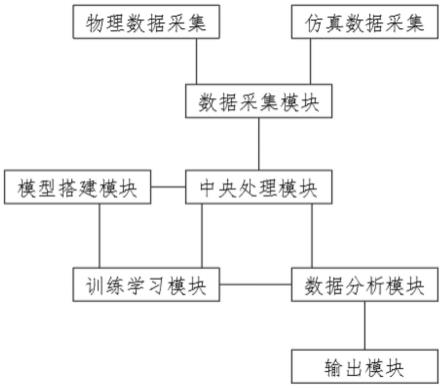
24.图1是本发明系统的结构框图。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
26.实施例一
27.请参阅图1所示,本发明为一种基于深度学习训练模型的工程叉车迁移学习系统,包括中央处理模块,中央处理模块用于处理整个系统的数据信息,并发送指令命令到各个处理模块中,用于控制系统的各个处理模块;数据采集模块,用于采集工程叉车的各类数据信息,其中数据采集模块包括物理数据采集和仿真数据采集,物理数据采集为真实环境下
工程叉车在实际工作过程中各类数据信息的采集,仿真数据采集为计算机仿真环境下,工程叉车在仿真模拟状态下各类数据的采集,通过将物理数据信息和仿真数据信息进行对比整合,从而提高对工程叉车学习训练的真实性。
28.模型搭建模块,用于搭建深度学习训练模型,通过深度学习训练模型进行叉车的训练学习,实现对叉车的各类数据信息进行整合统计,获得工程叉车实际工作的数据信息。
29.训练学习模块,利用模型搭建模块所搭建的深度学习训练模型,结合数据采集模块所采集的叉车数据信息,将数据信息与深度学习训练模型相结合,实现对叉车的训练学习,统计叉车的模拟训练学习数据。
30.数据分析模块,对训练学习模块获得的学习数据进行统计,同时分析数据采集模块中所采集的物理数据信息,对比分析获得叉车实际使用的最优数据信息。
31.输出模块,对系统的数据信息结构进行输出。
32.物理数据采集对普通工程叉车在实际工作时的能源损耗数据信息以及设置有能源回收机构工程叉车的能源回收数据信息,并将实际能源损耗和能源回收的数据信息通过数据采集模块发送到中央处理模块中,同时利用计算机搭建工程叉车仿真工作环境,通过仿真数据采集对仿真环境下工程叉车的仿真能源损耗数据信息和仿真能源回收数据信息进行收集,数据采集模块将仿真能源损耗数据信息和仿真能源回收数据信息发送至中央处理模块中,模型搭建模块根据数据采集模块所采集的物理数据信息和仿真数据信息,搭建对应的深度学习训练模型,训练学习模块利用深度学习训练模型进行工程叉车的训练学习,通过大量的学习训练获取工程叉车在工作时的能源损耗,以及安装能源回收机构后的最佳能源回收数据,通过数据分析模块对工程叉车的能源损耗与回收关系进行分析,获取工程叉车的最佳能源回收效果的数据信息,最后通过输出模块将最佳的能源回收效果数据信息进行输出,完成对现实工程叉车的改进。
33.对叉车能源的回收包括对叉车工作装置势能的回收以及对叉车行走装置制动能的回收。
34.工程叉车对工作势能的回收具体为:当钢叉上升时,动力源通过液压泵提供液压能供货物上升,转化为货物的重力势能;下降时,货物的重力势能又转化为液压能。在叉车的液压系统中设计储能装置,以把升降装置下降过程中释放的势能存储起来并在上升时加以利用,提高能量利用效率,并同时达到使系统运行平稳、工作可靠、安全的目的。
35.工程叉车对行走制动能的回收具体为:在车辆制动时将能量逆向传递,相对于车辆正常行驶时从发动机至车轮的正向传递,将车辆行驶动能经车轮、传动系统、发电机/液压马达转换为电能/液压能存储于蓄能器中,并在之后的行驶中释放出来辅助发动机输出做功,可以实现叉车在非紧急制动时,利用蓄能器将本该被制动系统转化为热能散失掉的能量回收起来,并在叉车再次加速时释放出来与发动机共同配合驱动叉车行驶,实现能量回收和再利用。
36.实施例二
37.本实施例用于对工程叉车使用寿命进行学习训练,从而确定叉车易损件的更换时间,确保叉车使用过程中的安全性能,本实施例以叉车的钢叉为例进行说明。
38.物理数据采集对工程叉车在实际工作时钢叉的工作数据以及对应的使用寿命等数据信息,并将工程叉车的实际物理数据信息通过数据采集模块发送至中央处理模块中,
计算机根据工程叉车的理论数据搭建仿真工作环境,通过仿真数据采集对仿真环境下工程叉车的仿真数据信息以及钢叉的使用寿命信息进行采集,并将对应的仿真数据信息发送到中央处理模块中,模型搭建模块根据数据采集模块所采集的物理数据信息和仿真数据信息,搭建对应的深度学习训练模型,随后训练学习模块通过该深度学习训练模型进行工程叉车的训练学习,通过大量的学习训练获取工程叉车在工作时钢叉的使用寿命,通过数据分析模块对工程叉车钢叉的工作状态与使用寿命进行数据对比分析,得到工程叉车使用寿命的数据信息以及最佳更换时间,输出模块将数据结果输出,方便对工程叉车在实际使用时及时更换钢叉,确保工程叉车在使用时的安全性。
39.针对钢叉使用寿命的更换频率,其具体采集训练流程为:
40.第一阶段为工程叉车仿真训练阶段,利用工程叉车仿真软件仿真得到计算机仿真样本,采用计算机仿真样本对预设的深度学习训练模型进行训练,得到第一阶段深度学习训练模型;
41.第二阶段为物理样本训练阶段,将第一阶段深度学习训练模型与预设深度学习训练模型进行模型融合,采用物理样本对融合后的深度学习训练模型进行训练,得到第二阶段深度学习训练模型,其中物理样本为数据采集模块所采集的物理数据信息样本;
42.第三阶段为混合样本训练阶段,将第二阶段深度学习训练模型与预设深度学习训练模型进行模型融合,采用计算机仿真样本和物理样本混合得到混合样本对融合后的深度学习训练模型进行训练,得到最终的深度学习训练模型,训练过程结束。
43.在训练学习过程中,设定工程叉车的叉送次数为n、单次叉送重量为ma、叉送的总重量为m、单次叉送断裂的临界重量为mb,钢叉的使用总寿命为s,钢叉的更换时间为t。
44.则m=n
×
ma
45.钢叉的使用寿命与叉车叉送货物的总重量以及叉送的次数有关,当叉送的总重量越重,亦或者叉送的次数越多,则钢叉的使用寿命则越短;
[0046][0047]
式中k为工程叉车钢叉使用寿命的固定系数,其系数的值与钢叉的材质以及规格有关。
[0048]
为保证钢叉的正常使用,则钢叉单次叉送的重量要小于钢叉的断裂临界重量,即
[0049]
ma≤g
×
mb
[0050]
式中g为钢叉使用的安全系数,g的取值范围为0.5-0.9,其具体数值与钢叉的使用材质和规格相关。
[0051]
为了提高工程叉车在使用时的安全性能,防止叉车在使用过程中钢叉发生断裂造成安全事故,钢叉的更换时间t应小于钢叉的使用总寿命s,即
[0052]
t≤f
×s[0053]
式中f为钢叉使用的安全系数,其具体数值与钢叉的使用材质和规格相关。
[0054]
本发明还提供叉车的迁移学习方法,根据不同的迁移学习任务,划分源领域和目标领域,并构建迁移学习网络、初始化网络超参数。
[0055]
基于特征提取器与分类器,构建所述迁移学习网络;
[0056]
本发明实施例提供的迁移学习网络是由特征提取器、标签分类器两部分构成,特
征提取器用于提取叉车输入样本集的特征,分类器用于对输入叉车样本集进行预测分类。
[0057]
具体的,为了提高预设迁移学习网络的性能,在进行迁移学习之前先使用已标注的imagenet数据集对预设迁移学习网络进行预训练。resnet-50模型构成的子网络作为本发明实施例迁移学习网络的特征提取器,特征提取器后接的两个全连接层作为标签分类器。
[0058]
将源领域和目标领域各自数据样本输入至预设迁移学习网络并正向传播,获取网络预测标签;使用随机梯度下降法进行整个网络的训练,利用反向传播完成网络参数的更新,直至模型收敛或达到最大迭代次数时停止训练。
[0059]
基于预设的损失函数,对迁移学习网络进行学习。
[0060]
具体的,在对迁移学习网络的训练过程中,将源领域的知识迁移到目标领域中,通常被称为迁移学习。对于深度迁移学习网络在传统意义上的训练,通常引入损失函数,损失函数度量的是预测值与真实值之间的差异;在神经网络的深度迁移学习过程中,也可以引入一个损失函数,在度量预测值与真实值之间的差异的同时还需要能够度量迁移学习的效果。
[0061]
然而,源领域与目标领域的数据服从不同的概率分布,仅将传统意义上的损失函数作为迁移学习过程中的损失函数,并不能使迁移学习达到很好的效果。
[0062]
在上述实施例的基础上,预设的损失函数包括源领域分类错误率损失函数、目标领域预测输出的条件熵损失函数以及目标领域预测类别分布的熵损失函数,基于预设的损失函数,对迁移学习网络进行学习,包括:
[0063]
由源领域分类错误率损失函数、目标领域预测输出的条件熵损失函数以及目标领域预测类别分布的熵损失函数,确定深度迁移学习网络的损失函数,并以此更新深度迁移学习网络的参数,能使迁移学习网络适配目标领域,并可以达到很好的分类效果。
[0064]
根据上述损失函数,即可构建出本发明实施例提供的目标函数以及优化目标:
[0065][0066]
其中θ表示网络参数,s表示源领域样本集任一批次的样本,t表示目标领域样本集任一批次的样本;ls(
·
)表示源领域分类错误率损失函数,le(
·
)表示目标领域预测输出的条件熵损失函数,ld(
·
)表示目标领域预测类别分布的熵损失函数;λ和β是可调整的权衡参数。
[0067]
可以理解的是,学习过程为一个不断更新参数的过程,当迁移学习网络收敛或者达到预设的学习次数后,学习停止。
[0068]
通过迁移学习过程后,能够得到泛化性能较好的迁移学习网络,保存网络最终模型以及训练结果后,将未标注的目标领域样本集引入该网络模型,得到较为准确的目标领域样本集标签。训练完成的网络可以用于预测目标领域无标记的样本,代替人工以较高的准确率标记未知数据。
[0069]
以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1