一种数字孪生城市云渲染真实地理坐标匹配方法与系统与流程
1.本发明涉及gis数据处理技术领域,特别涉及一种数字孪生城市云渲染真实地理坐标匹配方法与系统。
背景技术:
2.数字孪生又称为数字双胞胎,主要在数字空间构建虚实结合的全信息映射,同步反映物理系统的实时动态,在难以开展的真实环境中进行各种分析研究,为各种高级应用提供技术支撑。全球物联网、5g、人工智能、无人驾驶、虚拟现实、深度学习等技术研发和产业化加速突破,掀起数字化网络化智能化新一轮浪潮。同时,智慧城市实施进程不断加快,实施内容持续深入,其发展理念、推进模式和技术体系不断更新和演进,建设虚拟服务现实、数据驱动治理、智能定义一切的数字孪生城市将成为智慧城市的重要趋势。
3.常用的数字孪生场景开发工具常用的坐标系为右手坐标系,并未与真实地理坐标相匹配起来,无法应用在真实城市环境中。
4.针对上述问题,本发明提出了一种数字孪生城市云渲染真实地理坐标匹配方法与系统。
技术实现要素:
5.本发明为了弥补现有技术的缺陷,提供了一种简单高效的数字孪生城市云渲染真实地理坐标匹配方法与系统。
6.本发明是通过如下技术方案实现的:
7.一种数字孪生城市云渲染真实地理坐标匹配方法,其特征在于:包括以下步骤:
8.s1、收集城市底图遥感影像与城市建筑shp矢量数据
9.通过bigmap或水经注下载高精度城市遥感影像,通过openstreetmap下载城市建筑shp矢量数据;
10.高精度的城市底图遥感影像用于在数字孪生城市场景搭建时确定建筑位置以及地理坐标配准,计算出场景的中心位置坐标以及场景大小,以便创建场景底板;
11.城市建筑shp矢量数据用于快速创建城市白膜;
12.s2、处理城市底图遥感影像
13.使用gis软件导入城市底图遥感影像,并查看数据源信息,记录城市底图遥感影像的投影坐标系espg及地理坐标系espg标号;
14.数据源信息中范围数据通过左下角坐标(x0,y0)和右下角坐标(x1,y1)进行展示,利用这两组坐标计算出场景中心点坐标(x
p0
,y
p0
),
15.其中,x
p0
=(x0+x1)/2,y
p0
=(y0+y1)/2;
16.场景大小用宽度w和高度h表示:h=|y
1-y0|,w=|x
1-x0|;
17.根据三维建模软件按照计算出的场景大小(w,h)创建相应大小的平面,并将平面中心坐标设置为(0,0)坐标原点,之后导出为fbx数据;
18.s3、处理城市建筑shp矢量数据
19.使用gis技术制作城市建筑数据,先将其导入到blender软件中,再对城市建筑数据进行整体建模,从而得到城市建筑模型数据;
20.s4、虚幻引擎导入数据
21.将生成的城市建筑数据及城市平面数据统一导入到虚幻引擎项目文件中;
22.s5、虚幻引擎插件配置及数据计算
23.将地理坐标系espg标号及投影坐标系场景中心点坐标(x
p0
,y
p0
)的整数位(x
g,
,yg)输入到georeferencing算法,使用georeferencing算法可视化配置来对坐标进行配置;
24.为了防止georeferencing算法中的坐标设置只能输入整数导致的偏差,设置底图平面的ue引擎世界坐标偏移量(x
se
,y
se
);
25.s6、数字孪生场景坐标转换,并对坐标数据进行匹配
26.使用geographic to projected可视化方法实现地理坐标向投影坐标的转换;
27.使用projected to engine可视化方法实现投影坐标向虚幻引擎世界坐标的转换;
28.或者,通过engine to projected可视化方法实现虚幻引擎世界坐标向投影坐标的转换,通过projected to geographic可视化方法实现投影坐标向地理坐标的转化,将虚幻世界坐标数据转换为投影坐标或地理坐标数据。
29.所述步骤s3中,为了保证数据的展现效果,将城市建筑数据导入到blender后对数据整体进行拉伸,然后导出为fbx格式数据。
30.所述步骤s4中,按照遥感影像的纹理对建筑三维白膜进行缩放平移操作,使建筑准确得放置在准确的位置上。
31.所述场景中心点坐标(x
p0
,y
p0
)和场景大小(w,h)单位均为米,所述底图平面的ue引擎世界坐标偏移量(x
se
,y
se
)单位为cm;
32.其中,xse=xg*100-x
p0
*100,yse=-(yg*100-y
p0
*100);
33.由于投影坐标系(右手)与ue世界坐标系(左手)之间存在y值相反的差异,故y
se
取反值。
34.所述步骤s6中,采用engine to ecff视化方法实现实现虚幻引擎世界坐标向ecff坐标的转换;
35.所述世界原始坐标与虚幻引擎世界坐标先相加,再乘以0.01,即可得到ecff坐标,单位为米;
36.采用ecff to engine视化方法实现实现ecff坐标向虚幻引擎世界坐标的转换;
37.所述ecff坐标先乘以100倍,再减去世界原始坐标,即可得到虚幻引擎世界坐标。
38.所述geographic to projected可视化方法中,采用高斯-克吕格投影正解公式,实现地理坐标向投影坐标的转换;
39.所述projected to geographic可视化方法中,采用高斯-克吕格投影反解公式,实现投影坐标向地理坐标的转化。
40.所述projected to engine可视化方法中,先用投影坐标减去世界投影原始坐标,得到ue世界坐标,然后用ue基础坐标减去ue世界坐标,即可得到虚幻引擎世界坐标;
41.所述engine to projected可视化方法中,先将世界投影原始坐标与ue基础坐标
相加,再减去ue引擎坐标,再乘以0.01,即可得到投影坐标,单位为米。
42.基于上述数字孪生城市云渲染真实地理坐标匹配方法的系统,其特征在于:包括数据收集模块,数据处理模块,虚幻引擎插件与坐标转换模块;
43.所述数据收集模块负责收集城市底图遥感影像与城市建筑shp矢量数据,实现步骤s1;
44.所述数据处理模块负责处理城市底图遥感影像和城市建筑shp矢量数据,实现步骤s2-步骤s3;
45.所述虚幻引擎插件负责对坐标数据进行配置,实现步骤s4-步骤s5;
46.所述坐标转换模块负责数字孪生场景坐标转换,并对坐标数据进行匹配,实现步骤s6。
47.本发明的有益效果是:该数字孪生城市云渲染真实地理坐标匹配方法与系统,实现了对数字孪生场景中的世界坐标系到真实地理坐标系的转换,可以对数字孪生城市建设中的场景进行真实地理坐标匹配,避免由于没有真实地理坐标而导致的场景无法应用的问题,有助于搭建一个完善的数字孪生城市应用场景。
附图说明
48.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
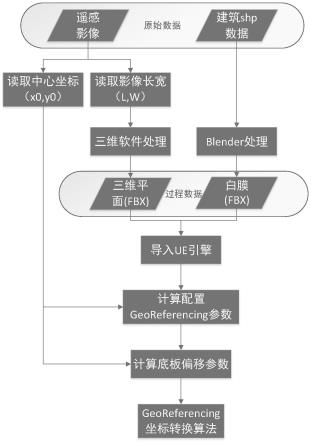
49.附图1为本发明数字孪生城市云渲染真实地理坐标匹配方法示意图。
具体实施方式
50.为了使本技术领域的人员更好的理解本发明中的技术方案,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚,完整的描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
51.该数字孪生城市云渲染真实地理坐标匹配方法,包括以下步骤:
52.s1、收集城市底图遥感影像与城市建筑shp矢量数据
53.通过bigmap或水经注下载高精度城市遥感影像,通过openstreetmap下载城市建筑shp矢量数据;
54.高精度的城市底图遥感影像用于在数字孪生城市场景搭建时确定建筑位置以及地理坐标配准,计算出场景的中心位置坐标以及场景大小,以便创建场景底板;
55.城市建筑shp矢量数据用于快速创建城市白膜;
56.s2、处理城市底图遥感影像
57.使用gis软件导入城市底图遥感影像,并查看数据源信息,记录城市底图遥感影像的投影坐标系espg及地理坐标系espg标号;
58.数据源信息中范围数据通过左下角坐标(x0,y0)和右下角坐标(x1,y1)进行展示,利用这两组坐标计算出场景中心点坐标(x
p0
,y
p0
),
59.其中,x
p0
=(x0+x1)/2,y
p0
=(y0+y1)/2;
60.场景大小用宽度w和高度h表示:h=|y
1-y0|,w=|x
1-x0|;
61.根据三维建模软件按照计算出的场景大小(w,h)创建相应大小的平面,并将平面中心坐标设置为(0,0)坐标原点,之后导出为fbx数据;
62.s3、处理城市建筑shp矢量数据
63.使用gis技术制作城市建筑数据,先将其导入到blender软件中,再对城市建筑数据进行整体建模,从而得到城市建筑模型数据;
64.s4、虚幻引擎导入数据
65.将生成的城市建筑数据及城市平面数据统一导入到虚幻引擎项目文件中;
66.s5、虚幻引擎插件配置及数据计算
67.将地理坐标系espg标号及投影坐标系场景中心点坐标(x
p0
,y
p0
)的整数位(x
g,
,yg)输入到georeferencing算法,使用georeferencing算法可视化配置来对坐标进行配置;
68.为了防止georeferencing算法中的坐标设置只能输入整数导致的偏差,设置底图平面的ue引擎世界坐标偏移量(x
se
,y
se
);
69.s6、数字孪生场景坐标转换,并对坐标数据进行匹配
70.使用geographic to projected可视化方法实现地理坐标向投影坐标的转换;
71.使用projected to engine可视化方法实现投影坐标向虚幻引擎世界坐标的转换;
72.或者,通过engine to projected可视化方法实现虚幻引擎世界坐标向投影坐标的转换,通过projected to geographic可视化方法实现投影坐标向地理坐标的转化,将虚幻世界坐标数据转换为投影坐标或地理坐标数据。
73.所述步骤s3中,为了保证数据的展现效果,将城市建筑数据导入到blender后对数据整体进行拉伸,然后导出为fbx格式数据。
74.所述步骤s4中,按照遥感影像的纹理对建筑三维白膜进行缩放平移操作,使建筑准确得放置在准确的位置上。
75.所述场景中心点坐标(x
p0
,y
p0
)和场景大小(w,h)单位均为米,所述底图平面的ue引擎世界坐标偏移量(x
se
,y
se
)单位为cm;
76.其中,xse=xg*100-x
p0
*100,yse=-(yg*100-y
p0
*100);
77.由于投影坐标系(右手)与ue世界坐标系(左手)之间存在y值相反的差异,故y
se
取反值。
78.所述步骤s6中,采用engine to ecff视化方法实现实现虚幻引擎世界坐标向ecff坐标的转换;
79.所述世界原始坐标与虚幻引擎世界坐标先相加,再乘以0.01,即可得到ecff坐标,单位为米;
80.采用ecff to engine视化方法实现实现ecff坐标向虚幻引擎世界坐标的转换;
81.所述ecff坐标先乘以100倍,再减去世界原始坐标,即可得到虚幻引擎世界坐标。
82.所述geographic to projected可视化方法中,采用高斯-克吕格投影正解公式,实现地理坐标向投影坐标的转换;
83.所述projected to geographic可视化方法中,采用高斯-克吕格投影反解公式,
实现投影坐标向地理坐标的转化。
84.所述projected to engine可视化方法中,先用投影坐标减去世界投影原始坐标,得到ue世界坐标,然后用ue基础坐标减去ue世界坐标,即可得到虚幻引擎世界坐标;
85.所述engine to projected可视化方法中,先将世界投影原始坐标与ue基础坐标相加,再减去ue引擎坐标,再乘以0.01,即可得到投影坐标,单位为米。
86.基于该数字孪生城市云渲染真实地理坐标匹配方法的系统,包括数据收集模块,数据处理模块,虚幻引擎插件与坐标转换模块;
87.所述数据收集模块负责收集城市底图遥感影像与城市建筑shp矢量数据,实现步骤s1;
88.所述数据处理模块负责处理城市底图遥感影像和城市建筑shp矢量数据,实现步骤s2-步骤s3;
89.所述虚幻引擎插件负责对坐标数据进行配置,实现步骤s4-步骤s5;
90.所述坐标转换模块负责数字孪生场景坐标转换,并对坐标数据进行匹配,实现步骤s6。
91.以上所述的实施例,只是本发明具体实施方式的一种,本领域的技术人员在本发明技术方案范围内进行的通常变化和替换都应包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1