基于旋转框标注YOLOV3的SAR舰船目标检测方法与流程
基于旋转框标注yolov3的sar舰船目标检测方法
技术领域
1.本发明涉及sar图像目标检测技术领域,特别涉及一种基于旋转框标注yolov3的sar舰船目标检测方法。
背景技术:
2.我国的海洋国土面积高达三百万平方公里,合理使用我国海洋资源对我国的战略和经济都有巨大的意义。sar具有光学遥感无法替代的优点,其全天时全天候的工作特点使sar图像成为海面检测的重要数据源。舰船作为海面上的主要活动目标,能够准确检测到舰船的动态对海防安全具有重要的意义,因此使用合成孔径雷达图像对海洋的舰船进行检测是海洋应用的研究热点。目前,传统的sar图像舰船检测算法通常都是采用cfar检测算法,这种算法假定海洋杂波服从某种分布,根据舰船和杂波灰度的不同来人为设定虚警,从而检测出目标,随着深度学习理论不断的发展,基于卷积神经网络的目标检测识别模型取得了远超传统方法的性能。用于目标检测的深度模型可分为一阶段检测模型和二阶段监测模型。
3.在一些应用场合,学者研究了输出目标方位角估计的深度检测模型,设计了一种多尺度自适应校正网络来检测任意方向的舰船目标,设计的模型采用中心点坐标、长宽和方位角共5个参数描述目标旋转框信息,其中目标方位角定义为水平轴沿逆时针方向旋转到与目标旋转框相交的角度。yolov3网络补齐了以往yolo版本的短板,主要通过使用更好的基础网络提取特征,并使用类似于特征金字塔的模块实现多尺度预测,实现了速度和精度的共同提升,特别是在不同采样下训练加强了对小目标的检测性能。
4.目前,通过已有的通用的目标算法在各种应用场景下精度和速度都能达到一个比较好的性能,但是这些网络框架大多都是基于垂直矩形框来定义目标区域的,但是有些目标并不是垂直目标,因此直接使用垂直矩形框对倾斜标进行框定会造成很多误差,为了进一步提升目标检测的精准性,需要对矩形框倾斜这一方面做出一部分工作。
技术实现要素:
5.本发明的目的在于提供一种基于旋转框标注yolov3的sar舰船目标检测方法,以解决现有技术中存在的问题。
6.为了解决上述技术问题,本发明的技术方案是:提供一种基于旋转框标注yolov3的sar舰船目标检测方法,包括如下步骤:
7.s1、采集包含感兴趣目标的sar图像,对所述sar图像进行预处理并构造包含感兴趣区域的雷达图像舰船数据库,并以(x1,y1,x2,y2,x3,y3,x4,y4)8参数描述任意角度的目标框,其中x1为标框左上角横坐标,y1为目标框左上角纵坐标,x2为目标框左下角横坐标,y2为目标框左下角纵坐标,x3为目标框右上角横坐标,y3为目标框右上角纵坐标,x4为目标框右下角横坐标,y4为目标框右下角纵坐标;
8.s2、将所述8参数目标框转化为5参数目标框,即为(t
rx
,t
ry
,t
rw
,t
rh
,t
rθ
);其中t
rx
,
t
ry
表示目标旋转框中心的横坐标、纵坐标;t
rw
,t
rh
表示目标旋转框的宽度和高度,t
rθ
表示目标方位角即为x轴沿逆时针方向旋转到与目标旋转框长边重合的角度;
9.s3、改进yolov3模型:
10.yolov3模型中的head部分在输出时,由于使用了目标方位角,要将各尺度特征图检测分支的输出维数增加到[s,s,b*(c+10)],其中s对应尺度特征图的输出分辨率,b代表每个尺度特征图使用anchor的个数,c为类别维度。
[0011]
进一步的,所述步骤s3还包括:
[0012]
为了校正yolov3模型输出的目标预测旋转框外接矩形与改进yolov3模型输出的目标预测垂直框计算iou值,若iou值小于阈值则认为旋转框中旋转角估计不准确,不进行旋转;若iou值大于阈值则认为旋转框中旋转角估计准确,进行旋转;其中所述iou值与多任务损失值loss之间的数学关系为:
[0013]
iou=1-loss。
[0014]
进一步的,多任务损失值loss的计算方法为:
[0015]
loss=loss
coord
+loss
rcoord
+loss
conf
+loss
class
+loss
angle
[0016][0017]
公式中的i,j代表特征图中第i个坐标点第j个框中的结果,在k为x,y,w,h时分别表示目标垂直框中,心横坐标,纵坐标、高度、宽度的真实值和预测值;
[0018][0019]
其中在k为{x,y,ω,h}时目标垂直框的真实值和预测值;
[0020]
目标置信度的具体公式为:
[0021][0022]
其中,表示负样本锚框,p
conf
和分别代表真实的和预测的置信度,其他参数同上。
[0023]
类别预测误差的具体公式为:
[0024][0025]
其中,p
class
和分别表示真实的类别概率和预测的类别概率。
[0026]
目标方位角估计损失采用均方差损失,具体定义如下:
[0027]
[0028]
其中,分别表示旋转框的方位角的真实值和预测值。
[0029]
本发明提供的基于旋转框标注yolov3的sar舰船目标检测方法取得的有益效果是:
[0030]
针对现有技术中目标检测算法存在的不足,如在复杂背景下对遥感图像中的飞机目标检测处理步骤过多,实时性较差的问题,如目标存在不同程度的倾斜时,使用通用的目标检测算法得到的目标区域中会包含较多的冗余背景信息,而在yolov3网络中加入旋转框并没有增加过多的工作量,且通过旋转,倾斜目标的准确率也得到了一定的提升。
附图说明
[0031]
下面结合附图对发明作进一步说明:
[0032]
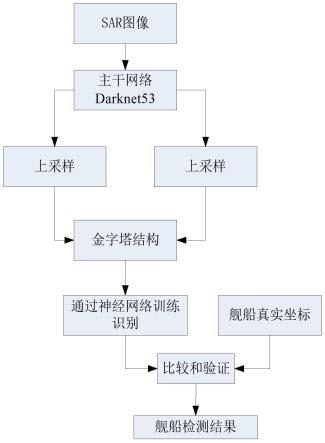
图1为传统yoiov3检测方法的流程图;
[0033]
图2为yolo整体输出信息的描述;
[0034]
图3为新增输出描述;
[0035]
图4为与旋转框对应的垂直框示意图。
具体实施方式
[0036]
以下结合附图和具体实施例对本发明提出的基于旋转框标注yolov3的sar舰船目标检测方法作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比率,仅用以方便、明晰地辅助说明本发明实施例的目的。
[0037]
步骤(1)采集包含感兴趣目标的sar图像,对图像进行预处理并构造包含感兴趣区域的雷达图像舰船数据库,并以(x1,y1,x2,y2,x3,y3,x4,y4)8参数描述任意角度的目标框;
[0038]
步骤(2)将8参数坐标目标框转化为5参数目标框,即为(t
rx
,t
ry
,t
rw
,t
rh
,t
rθ
);t
rx
,t
ry
表示目标旋转框中心的横坐标、纵坐标;t
rw
,t
rh
表示目标旋转框的宽度和高度,t
rθ
表示目标方位角即为x轴沿逆时针方向旋转到与目标旋转框长边重合的角度。
[0039]
步骤(3)改进yolov3模型
[0040]
yolov3模型主要由三部分组成,分为backbone、neck、head。其中主干网络叫做darknet53,这是一个分类网络,通过卷积池化及归一化等操作,最后再通过三个上采样就能覆盖到大中小三类目标。在训练阶段中,首先通过darknet网络进行特征提取,将特征提取组成的特征图放入结构化网络中得到三个尺度的特征图,再将这三个特征图输入到逻辑回归判断图中,得到结果。
[0041]
neck部分主要是将深层网络和浅层网络进行融合,进而训练处表达能力更强的网络,最后head部分在输出时,由于我们使用了目标方位角,因此要将各尺度特征图检测分支的输出维数增加到[s,s,b*(c+10)],其中s对应尺度特征图的输出分辨率,b代表每个尺度特征图使用anchor的个数,c为类别维度。
[0042]
进一步的,为了校正yolov3模型输出的目标预测旋转框外接矩形与改进yolov3模型输出的目标预测垂直框计算iou值若iou值小于阈值则认为旋转框中旋转角估计不准确。
[0043]
多任务损失函数共包含五部分,具体如下:
[0044]
loss=loss
coord
+loss
rcoord
+loss
conf
+loss
class
+loss
angle
[0045]
(1)
[0046]
下面具体讲述每类loss的求取方法及各参数含义:
[0047][0048]
公式中的i,j代表特征图中第i个坐标点第j个框中的结果,在k为x,y,w,h时分别表示目标垂直框中,心横坐标,纵坐标、高度、宽度的真实值和预测值。
[0049][0050]
其中在1为rx,ry,rw,rh时分别表示目标旋转框中心横坐标,纵坐标,高度,宽度的真实值和预测值。
[0051]
目标置信度的具体公式为:
[0052][0053]
类别预测误差的具体公式为:
[0054][0055]
目标方位角估计损失采用均方差损失,具体定义如下:
[0056][0057]
其中,分别表示旋转框的方位角的真实值和预测值。
[0058]
如图2,3,4所示,图2为yolo整体输出信息的描述,图3为新增输出描述,如下图所示,图4是与旋转框对应的垂直框示意图。。
[0059]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实
施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0060]
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0061]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0062]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0063]
本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1