一种基于模板匹配的心脏四腔心自动定位方法
1.本发明涉及一种基于模板匹配的心脏四腔心自动定位方法,属于计算机图像处理领域。
背景技术:
2.磁共振成像心脏扫描有3个基本扫描平面:两腔心、四腔心和短轴位。两腔心平面反映了左心室和左心房,四腔心平面反映了左右心室和左右心房,短轴位平面反映了左右心室的断面。以二尖瓣中点与左心室心尖的连线为轴线,进行心脏的矢状面、冠状面、横断面扫描,得到的扫描平面就是两腔心、四腔心和短轴位。
3.心脏定位完成后,患者才能进行后续的检查,例如:测量射血分数、心室体积、心脏质量;观察心脏的大体形态;进行电影序列扫描评估心肌功能;进行心肌灌注及延迟强化来诊断心肌疾病。
4.目前手工心脏定位的方式是先扫一个人体横断面,定位出左心室心尖与二尖瓣中点的连线(左心室长轴)。然后以此线进行扫描,得到两腔心平面(心脏矢状位);然后在两腔心平面位,以二尖瓣中点与左心室心尖连线进行扫描,得到四腔心平面(心脏冠状位);最后,以四腔心平面为参考平面,在左心室长轴方向连续垂直扫描,得到短轴位平面(心胜横断位)。该方法过程复杂,十分耗时,即使是受过专业训练的医生,大概需要3分钟才能完成整个扫描。并且对同一个患者进行心脏定位时,不同的操作者的结果可能会不一致,甚至同一操作者多次定位的结果也会有差异。
技术实现要素:
5.本发明针对手动定位方法中存在的问题,提出了一种基于模板匹配的心脏四腔心自动定位方法。在定位出四腔心平面后,医生可以如图1所示,在四腔心扫描面上划出二腔心和短轴平面,这样能减轻医生的工作负担,并且提高心脏定位准确度。
6.为了实现上述目的,本发明的技术方案如下:本发明提供一种基于模板匹配的心脏四腔心自动定位方法,具体步骤如下:
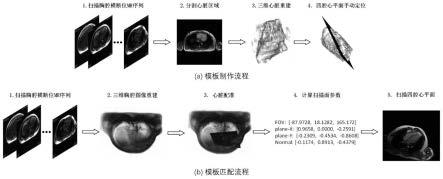
7.步骤1:模板制作;
8.步骤2:模板匹配;
9.其中,模板制作的具体步骤如下:
10.步骤11,扫描胸腔横断位mr序列;
11.步骤12,分割心脏区域;
12.步骤13,三维心脏图像重建。将图像中的非心脏区域像素值置为0,叠加图片序列,使用线性插值对图片重采样,将voxel spacing转换成(1,1,1),再进行高斯滤波,去除图像中的噪点;
13.步骤14,手动标注出四腔心的平面位置,平面参数化为三维平面方程ax+by+cz+d=0, a,b,c,d是系数。
14.其中,模板匹配的具体步骤如下:
15.步骤21,扫描胸腔横断位mr序列;
16.步骤22,三维胸腔图像重建。叠加图片序列,用线性插值对图片重采样,将voxelspacing转换成(1,1,1),进行高斯滤波,去除图片中的噪点;
17.步骤23,将心脏模板作为浮动图像,目标图像作为基准图像,进行配准。配准的目的是将点从浮动图像坐标系映射到基准图像的坐标系。配准有4个部分组成:变换函数、相似度指、优化方法、插值算法,细节如下:
18.a.变换函数使用了平移旋转变换,因为不同个体的心脏的位置和角度都不同,这样既可以将心脏模板平移到合适的位置上,又可以调整心脏模板的角度,从而使得四腔心的平面位置符合目标心脏。设旋转中心的坐标为(c
x
,cy,cz),平移量为(t
x
,ty,tz),绕xyz轴的旋转量为(θ
x
,θy,θz)(依次绕y轴、x轴、z轴旋转),变换后的坐标(x
*
,y
*
,z
*
)与变换前的(x,y,z)的映射关系为:
[0019][0020][0021]
b.相似度指标使用了互信息度量。有不同设备、不同时间扫描的mri的灰度有差异,而互信息度量指标具有不依赖于图像本身灰度,鲁棒性好的优点。互信息描述了图像x与图像 y之间的统计相关性,记p(x)和p(y)分别为x和y的边缘概率分布函数,p(x,y)为x和y的边缘概率分布函数,则互信息指标定义为:
[0022][0023]
c.优化方法使用梯度下降法。梯度下降法是先计算一个梯度,梯度的方向就是互信息度量值在此点上升最快的方向,然后更新参数使得互信息度量值达到局部最优值。梯度下降法有收敛速度快等优点。记转换参数为θ,相似度指标为j(θ),梯度为学习率为a,那么t时间参数θ的迭代过程为:
[0024][0025]
d.插值算法使用了三维线性插值算法。当图像经过变换后,输入坐标的像素值会映射到输出坐标,但是输出坐标有可能不在整数坐标处,而图像的保存需要整数坐标的像素值,所以其像素值需要根据输出坐标的像素值进行推断。而线性插值算法具有运算速度快,在一定程度上保留图片细节的优点。
[0026]
步骤24,根据(一)步骤4得到的平面方程ax+by+cz+d=0和(二)步骤3得到的变换矩阵得到的坐标(x
*
,y
*
,z
*
)与(x,y,z)的映射关系:
[0027][0028]
将(x
*
,y
*
,z
*
)带入平面方程ax+by+cz+d=0得到ax
*
+by
*
+cz
*
+d
*
=0,将 (x
*
,y
*
,z
*
)展开得到新的系数(a
*
,b
*
,c
*
,d
*
),即变换后的平面方程为:
[0029]a*
x+b
*
y+c
*
z+d
*
=0
[0030]
记mr扫描参数左上角坐标为fov,横轴方向向量为纵轴方向向量法向量为normal。已知平面的方向向量为扫描面的边长为l,三维心脏图像的重心为g,向量归一化操作为 normalize。参数计算流程如下:
[0031][0032][0033][0034][0035]
该计算方案不仅能让心脏保持在图片的中心,又能让扫描面的横轴方向与世界坐标系的 x-z平面平行,符合医生诊视的习惯。
[0036]
步骤25,将扫描面参数输入机器,扫描心脏四腔心平面。
[0037]
相对于现有技术,本发明的优点如下:
[0038]
(1)本发明提到的模板制作流程简单,模板完成后可以重复使用;(2)相较于深度学习的方法,本发明不需要很多的训练数据,只需要一份合适的数据用于模板制作;(3)本发明在配准过程中本发明使用了旋转平移变换函数,因为不同个体的心脏的位置和角度都不同,这样既可以将心脏模板平移到合适的位置上,又可以调整心脏模板的角度;(4)本发明在配准过程中使用了互信息度量,该指标具有不依赖于图像本身灰度,鲁棒性好的优点;(5)本发明提出的扫描面计算方法,能让最终得到的四腔心扫描面符合医生诊视的习惯,包含2个特征:心脏保持在图片的中心,横轴方向与世界坐标系的x-z平面平行;(6)本发明是一个自动化的,端到端的方法,如图3所示,将本方法集成为一个软件后,医生只需要点击导入 dicom序列,等待片刻,就可以得到四腔心扫描面参数。
附图说明
[0039]
图1为心脏二腔心和短轴位的示意图。
[0040]
图2为本发明的流程示意图。
[0041]
图3为配准过程图。
[0042]
图4为软件运行结果图。
具体实施方式
[0043]
下面结合具体实施例,进一步阐明本发明,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落于本技术所附权利要求所限定的范围。
[0044]
实施例:参见图2,本发明提供一种基于模板匹配的心脏四腔心自动定位方法,具体步骤如下:
[0045]
具体步骤分为模板制作和模板匹配2个部分。
[0046]
步骤1模板制作的具体步骤如图2(a)所示:
[0047]
步骤11,扫描胸腔横断位mr序列;
[0048]
步骤12,分割心脏区域;
[0049]
步骤13,心脏图像三维构建。将图像中的非心脏区域像素值置为0,叠加图片序列,使用线性插值对图片重采样,将voxel spacing转换成(1,1,1),再进行高斯滤波,去除图像中的噪点;
[0050]
步骤14,手动标注出四腔心的平面位置(平面参数化为ax+by+cz+d=0),记录平面参数。
[0051]
步骤2:模板匹配的具体步骤如图2(b)所示:
[0052]
步骤21,扫描胸腔横断位mr序列;
[0053]
步骤22,三维胸腔图像重建。叠加图片序列,用线性插值对图片重采样,将voxelspacing转换成(1,1,1),进行高斯滤波,去除图片中的噪点;
[0054]
步骤23,将心脏模板作为浮动图像,目标图像作为基准图像,进行配准。变换函数使用了平移旋转变换,相似度指标使用了互信息度量,优化方法使用梯度下降法,插值算法使用了三维线性插值算法;
[0055]
步骤24,根据(一)步骤4得到的平面方程和(二)步骤3得到的变换矩阵,计算扫描面参数。使用平面方程和变换矩阵,计算得到变换后的平面方程a
*
x+b
*
y+c
*
z+d
*
=0。记mr扫描参数左上角坐标为fov,横轴方向向量为纵轴方向向量法向量为normal,向量归一化操作为normalize。已知平面的方向向量为扫描面的边长为l,三维心脏图像的重心为g。参数计算流程如下:
[0056][0057][0058][0059][0060]
步骤25,将扫描面参数输入机器,扫描心脏四腔心平面。
[0061]
效果评估:
[0062]
本发明提出一种基于模板匹配的心脏四腔心自动定位方法,该方法的测试结果如图3所示。从图中可以看到,本发明被集成为一个软件,在测试时点击“导入dicom序列”按钮,软件会自动完成三维胸腔图像重建,点击“开始配准”,软件会进行胸腔图像和心脏模板的配准,配准完成后软件会自动计算扫描面参数,医生将参数输入核磁共振机器,得到心脏四腔心扫描图像。测试结果说明该方法能够快速并准确地预测出四腔心扫描参数,为医生进行心脏定位提供了一种高效的方案。
[0063]
以上所述,仅为本发明中的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉该技术的人在本发明所揭露的技术范围内,可理解想到的变换或替换,都应涵盖在本发明的包含范围之内,因此,本发明的保护范围应该以权利要求书的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1