TFT贴合设备的制作方法
tft贴合设备
技术领域
1.本发明涉及触摸屏用制造设备技术领域,具体地,涉及一种tft贴合设备。
背景技术:
2.tft(thin film transistor)是薄膜晶体管的缩写。采用使用压合部件给上膜物料、下膜物料加压的方式实现上膜物料、下膜物料的贴合是现有的tft贴合设备工作原理之一。但目前的贴合设备均存在操作安全性不足,设备工作时,压合部件易误伤操作人员手部的情况,而采用自动上料系统的贴合设备又存在自动上料系统出现故障后,不得不停工的尴尬场面。
3.专利文献cn207148798 u公开了一种该贴合设备包括设备支架,设置于设备支架上的驱动部件,连接于驱动部件上的用于吸附触摸屏的上压模和设置于设备支架底部且与上压模相对应的下压模,下压模上设有定位件和用于对tft模组施压的加压件,定位件上设有用于放置tft模组的定位槽,加压件位于定位槽的下方;在加压过程中,加压件能够发生形变与tft模组逐步贴合。但该方案仍然存在上述技术问题。
技术实现要素:
4.针对现有技术中的缺陷,本发明的目的是提供一种tft贴合设备。
5.根据本发明提供的一种tft贴合设备,包括贴合装置、安全装置以及控制器,所述安全装置安装在所述贴合装置上,且通过所述控制器与所述贴合装置电连接;所述安全装置用于探测操作员是否有肢体靠近贴合装置,并实现贴合装置的紧急制动;
6.贴合装置具有工作状态、第一上料状态、第二上料状态、第一上料位以及第二上料位,所述贴合装置包括工作台面、水平导轨、水平移动组件、水平驱动组件、下模夹具、旋转电机、固定支架、垂直导轨、垂直移动组件、垂直驱动组件以及上模夹具;所述下模夹具、上模夹具分别用于安装下模物料与上模物料;
7.所述水平导轨紧固安装在所述工作台面上,所述水平移动组件与所述水平导轨相匹配,且能够在水平驱动组件的驱动下,在水平导轨上沿所述水平导轨的长度方向移动,所述下模夹具可拆卸的安装在所述水平移动组件上;
8.所述固定支架紧固安装在所述工作台面上,所述垂直导轨紧固安装在所述固定支架上,所述垂直移动组件与所述垂直导轨相匹配,且能够在且能够在垂直驱动组件的驱动下,在垂直导轨上沿所述垂直导轨的长度方向移动,所述旋转电机紧固安装在所述垂直移动组件上,所述上模夹具可拆卸的安装在所述旋转电机上,所述旋转电机能够驱动所述上模夹具进行翻转;第一上料位与第二上料位分别位于所述工作台面的两端。
9.当所述贴合装置处于第一上料状态时,所述下模夹具位于所述水平导轨的一侧,所述旋转电机将所述上模夹具翻转至朝向第一上料位;当所述贴合装置处于第二上料状态时,所述下模夹具位于所述水平导轨的另一侧,所述旋转电机将所述上模夹具翻转至朝向第二上料位;
10.当所述贴合装置处于工作状态时,旋转电机将所述上模夹具翻转至与下模夹具平行,下模夹具在水平移动组件的带动下运动至与上模夹具相对应位置,上模夹具在垂直移动组件的带动下朝向下模夹具运动,实现上模物料与下模物料的贴合。
11.优选地,所述下模夹具上设置有定位孔,所述上模夹具上设置有定位柱,当所述贴合装置处于工作状态时,所述定位柱能够与所述定位孔相配合。
12.优选地,所述下模夹具与上模夹具上均设置有负压吸附装置,所述负压吸附装置与所述控制器电连接。
13.优选地,水平驱动组件包括第一电机,水平移动组件包括第一安装板;所述第一电机通过齿轮齿条结构或螺杆滑块结构驱动第一安装板运动。
14.优选地,垂直驱动组件包括第二电机,垂直移动组件包括第二安装板;所述第二电机通过齿轮齿条结构或螺杆滑块结构驱动第二安装板运动。
15.优选地,所述下模夹具与上模夹具上均设置有感应传感器。
16.优选地,上模夹具上设置有压力传感器,用于实时监控上模物料与下模物料贴合过程中的压力。
17.优选地,所述安全装置包括安全光栅、启动按钮,所述安全光栅、启动按钮均通过控制器与所述水平驱动组件、竖直驱动组件、旋转电机电连接,所述安全光栅与启动按钮均安装在所述固定支架上。
18.优选地,还包括上料机械臂,上料机械臂与所述控制器电连接,所述上料机械臂安装在所述第一上料位,所述上料机械臂用于给所述贴合装置安装上模物料与下模物料;所述第二上料位为人工上料位,在第二上料位,采用人工方式给所述贴合装置安装上模物料与下模物料。
19.优选地,所述tft贴合设备的四周为三面封闭,一面开口结构,所述开口为第二上料位。
20.与现有技术相比,本发明具有如下的有益效果:
21.1、本发明通过安全光栅的设计方案,实现了水平驱动组件、竖直驱动组件、旋转电机等部件的紧急制动,确保操作人员的安全。并且本发明通过导轨、旋转电机、第一上料位以及第二上料位的设计方案,实现机械臂和人工两种取放物料的模式,解决了设备一旦机械臂异常,就无法运行,导致产线停产的问题。
22.2、本发明的下模夹具与上模夹具均为可拆卸安装设计,针对不同的上模物料与下模物料可进行更换,可更换的设计方案,实现兼容不同的产品,提高了设备的利用率,解决了设备闲置、产线生产面积紧缺的问题
23.3、本发明还通过在上模夹具设置压力传感器的设计方案,满足了贴合压力工艺需求,解决了传统设备由于贴合压力过大或者过小而导致的产品质量问题。
附图说明
24.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
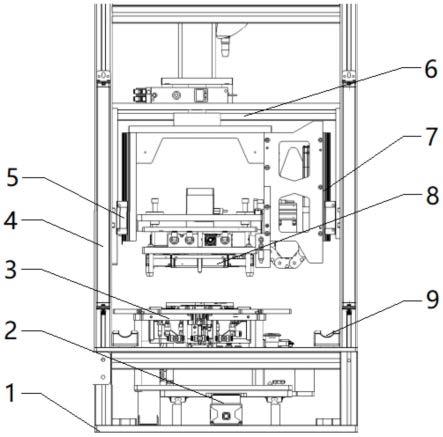
25.图1为本发明的主视结构示意图;
26.图2为本发明的俯视结构示意图;
27.图3为本发明的侧视结构示意图。
28.图中示出:
29.具体实施方式
30.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
31.本发明提供了一种tft贴合设备,包括贴合装置、安全装置以及控制器,所述安全装置安装在所述贴合装置上,且通过所述控制器与所述贴合装置电连接;所述安全装置用于探测操作员是否有肢体靠近贴合装置,并实现贴合装置的紧急制动;
32.贴合装置具有工作状态、第一上料状态、第二上料状态、第一上料位10以及第二上料位11,所述贴合装置包括工作台面1、水平导轨2、水平移动组件、水平驱动组件、下模夹具3、旋转电机5、固定支架6、垂直导轨7、垂直移动组件、垂直驱动组件以及上模夹具8;所述下模夹具3、上模夹具8分别用于安装下模物料与上模物料;
33.所述水平导轨2沿所述工作台面1的长度方向紧固安装在所述工作台面1上,所述水平移动组件与所述水平导轨2相匹配,且能够在水平驱动组件的驱动下,在水平导轨2上沿所述水平导轨2的长度方向移动,所述下模夹具3可拆卸的安装在所述水平移动组件上;在一个优选例中,所述水平导轨2为水平滑轨。
34.所述固定支架6紧固安装在所述工作台面1上,所述垂直导轨7紧固安装在所述固定支架6上,优选的,所述垂直导轨7置于固定支架6内部两侧。所述垂直移动组件与所述垂直导轨7相匹配,且能够在且能够在垂直驱动组件的驱动下,在垂直导轨7上沿所述垂直导轨7的长度方向移动,所述旋转电机5紧固安装在所述垂直移动组件上,所述上模夹具8可拆卸的安装在所述旋转电机5上,所述旋转电机5能够驱动所述上模夹具8进行翻转;第一上料位10与第二上料位11分别位于所述工作台面1的两端。在一个优选例中,所述垂直导轨7为垂直滑轨。
35.当所述贴合装置处于第一上料状态时,所述下模夹具3位于所述水平导轨2的一侧,所述旋转电机5将所述上模夹具8翻转至朝向第一上料位10;当所述贴合装置处于第二上料状态时,所述下模夹具3位于所述水平导轨2的另一侧,所述旋转电机5将所述上模夹具8翻转至朝向第二上料位11;
36.当所述贴合装置处于工作状态时,旋转电机5将所述上模夹具8翻转至与下模夹具
3平行,下模夹具3在水平移动组件的带动下运动至与上模夹具8相对应位置,上模夹具8在垂直移动组件的带动下朝向下模夹具3运动,实现上模物料与下模物料的贴合。
37.在一个优选例中,所述下模夹具3上设置有定位孔,所述上模夹具8上设置有定位柱,当所述贴合装置处于工作状态时,所述定位柱能够与所述定位孔相配合,采用定位柱与定位孔设计能够使上模夹具8与下模夹具3实现高精度定位,解决了贴合偏位的质量问题。
38.在一个优选例中,所述下模夹具3与上模夹具8上均设置有负压吸附装置,所述负压吸附装置与所述控制器电连接,所述负压吸附装置用于吸附上模物料与下模物料,所述负压吸附装置可采用厂家为smc(日本),型号为zk2a07k5nl2a-06的负压吸附装置。所述下模夹具3与上模夹具8上均设置有感应传感器,所述有感应传感器用于感应上模物料与下模物料是否放到位。上模夹具8上设置有压力传感器,用于实时监控上模物料与下模物料贴合过程中的压力,确保工艺需求。所述感应传感器可采用漫反射传感器,可采用欧姆龙-d81传感器。
39.在一个优选例中,水平驱动组件包括第一电机,水平移动组件包括第一安装板;所述第一电机通过齿轮齿条结构或螺杆滑块结构驱动第一安装板运动;垂直驱动组件包括第二电机,垂直移动组件包括第二安装板;所述第二电机通过齿轮齿条结构或螺杆滑块结构驱动第二安装板运动;所述第一安装板为下模夹具安装板,第二安装板为旋转电机安装板。所述水平驱动组件、垂直驱动组件也可用其他结构驱动水平移动组件、垂直移动组件;所述水平驱动组件、垂直驱动组件可分别安装在所述工作台面1、固定支架6上;所述水平驱动组件、垂直驱动组件也可分别安装在所述水平导轨2、垂直导轨7上,水平驱动组件、垂直驱动组件的安装位置取决于水平驱动组件、垂直驱动组件分别驱动水平移动组件、垂直移动组件的驱动形式。
40.所述安全装置包括安全光栅4、启动按钮9,所述安全光栅4、启动按钮9均通过控制器与所述水平驱动组件、竖直驱动组件、旋转电机5电连接,安全光栅4、启动按钮9用于水平驱动组件、竖直驱动组件、旋转电机5等运动部件的紧急制动和启动;安全光栅4确认操作员是否有肢体靠近运动部件,若有肢体靠近则水平驱动组件、竖直驱动组件、旋转电机5等运动部件紧急制动;所述安全光栅4与启动按钮9均安装在所述固定支架6上,优选的,所述安全光栅4置于固定支架6外边两侧,所述启动按钮9的数量为两个,分别置于固定支架6下方两侧,操作员双手触碰启动按钮9,可启动水平驱动组件、竖直驱动组件、旋转电机5等运动部件。
41.在一个优选例中,所述的tft贴合设备,还包括上料机械臂,上料机械臂与所述控制器电连接,所述上料机械臂安装在所述第一上料位10,用于给所述贴合装置安装上模物料与下模物料。所述第二上料位11为人工上料位,在第二上料位11,采用人工方式给所述贴合装置安装上模物料与下模物料。在此优选例中,当采用上料机械臂上料时,贴合装置处于第一上料状态。上料及工作过程如下:所述控制器需要先控制垂直移动组件沿垂直导轨7回到最上方的原点,确保旋转电机5驱动上模夹具8翻转时不会与水平导轨2产生干涉;然后所述控制器通过控制水平移动组件使下模夹具3在水平导轨2上水平移动,使下模夹具3运动到靠近第一上料位10(机械臂)的位置(远离第二上料位11的一端),便于上料机械臂放置下模物料;所述控制器再控制旋转电机5旋转上模夹具8,使上模夹具8面向上料机械臂(背向第二上料位11),便于上料机械臂放置上模物料。所述上模夹具8上感应传感器确认上模物
料放到位后,开启负压装置吸附住上模物料。所述下模夹具3上感应传感器确认到下模物料放到位后,开启负压装置吸附住下模物料。当上、下模物料都到位后,所述控制器会监控上料机械臂是否回到安全位置,如果是则启动贴合装置进行上、下物料贴合,如否则继续等待机械臂信号。所述tft贴合设备进行产品贴合时,控制器先控制旋转电机5旋转上模夹具8,使上模夹具8正向下与所述下模夹具3平行;然后控制水平移动组件水平移动下模夹具3,使下模夹具3到待贴合位置即与上模夹具8相对应位置;所述控制器再控制垂直移动组件向下移动上模夹具8,使上模夹具8下压到待贴合位置;这时,上模夹具8上的定位柱插入下模夹具3上的定位孔,实现产品位置的精对位;接着在所述上模夹具8上的压力传感器开启的前提下,所述控制器控制垂直移动组件使上模夹具8向下缓慢移动,等压力传感器上的压力值达到工艺参数需求时,停止贴合作业。最后关闭上模夹具8和下模夹具3的负压装置,控制垂直移动组件向上回到最上方的原点位置;控制水平移动组件使下模夹具3水平移动,使下模夹具3运动到靠近第一上料位10(机械臂)的位置(远离第二上料位11的一端),所述控制器控制旋转电机5旋转上模夹具8,使上模夹具8面向机械臂的位置(背向第二上料位11)。这时,机械臂可以取出贴合完毕的产品,并进行下一个产品的贴合作业。
42.在上述优选例中,第二上料位11为人工上料位,同时采用上料机械臂与人工上料位的设计解决了自动设备一旦机器人异常,就无法运行,导致产线停产的问题。当使用人工上料时,贴合装置处于第二上料状态。上料及工作过程如下:所述控制器需要先控制垂直移动组件沿垂直导轨7回到最上方的原点,确保旋转电机5驱动上模夹具8翻转时不会与水平导轨2产生干涉;然后所述控制器通过控制水平移动组件使下模夹具3在水平导轨2上水平移动,使下模夹具3运动到靠近第二上料位11(人工上料位)的位置(远离第一上料位10的一端),便于操作人员放置下模物料;所述控制器再控制旋转电机5旋转上模夹具8,使上模夹具8面向操作人员(背向第一上料位10),便于操作人员放置上模物料。所述上模夹具8上感应传感器确认上模物料放到位后,开启负压装置吸附住上模物料。所述下模夹具3上感应传感器确认到下模物料放到位后,开启负压装置吸附住下模物料。当上、下模物料都到位后,所述控制器会监控操作员是否触发启动按钮9,如果触发则启动贴合装置进行产品贴合,如未触发则继续等待。所述tft贴合设备进行产品贴合时,控制器先控制旋转电机5旋转上模夹具8,使上模夹具8正向下与所述下模夹具3平行;然后控制水平移动组件水平移动下模夹具3,使下模夹具3到待贴合位置即与上模夹具8相对应位置;所述控制器再控制垂直移动组件向下移动上模夹具8,使上模夹具8下压到待贴合位置;这时,上模夹具8上的定位柱插入下模夹具3上的定位孔,实现产品位置的精对位;接着在所述上模夹具8上的压力传感器开启的前提下,所述控制器控制垂直移动组件使上模夹具8向下缓慢移动,等压力传感器上的压力值达到工艺参数需求时,停止贴合作业。最后关闭上模夹具8和下模夹具3的负压装置,控制垂直移动组件向上回到最上方的原点位置;控制水平移动组件使下模夹具3水平移动,使下模夹具3运动到靠近第二上料位11(人工上料位)的位置(远离第一上料位10的一端),所述控制器控制旋转电机5旋转上模夹具8,使上模夹具8面向操作人员的位置(背向机械臂)这时,操作员可以取出贴合完毕的产品,并进行下一个产品的贴合作业。
43.所述安全装置的工作原理如下:所述贴合装置进行产品贴合过程中,如果安全光栅4被触发,就会紧急制动当前正在运动的所有运动部件,包括水平驱动组件、旋转电机5、垂直驱动组件以及上料机械臂;这时,如果要继续作业,必须确保全光栅4未被触发,且操作
员双手触发启动按钮9。
44.在上述优选例中,所述tft贴合设备的四周为三面封闭,一面开口结构,所述开口为第二上料位11。所述tft贴合设备除了靠近操作员的那一面的其它三个面都实现封闭,确保操作员的肢体不能通过其它三个面靠近内部,保证了操作人员的操作安全。
45.本发明通过安全光栅的设计方案,实现运动部件的紧急制动,确保操作人员的安全。并且本发明通过导轨、旋转电机、第一上料位10以及第二上料位11的设计方案,实现机械臂和人工两种取放物料的模式,应用场景更多,水平移动组件靠近第二上料位11、旋转电机旋转至朝向第二上料位11时,可由人工进行取放物料;水平移动组件靠近第一上料位10、旋转电机旋转朝向第一上料位10时,可由机械臂自动取放物料,解决了设备一旦机械臂异常,就无法运行,导致产线停产的问题。除此以外,本发明的下模夹具3与上模夹具8均为可拆卸安装设计,针对不同的上模物料与下模物料可进行更换,可更换的设计方案,实现兼容不同的产品,提高了设备的利用率,解决了设备闲置、产线生产面积紧缺的问题。本发明还通过在上模夹具8设置压力传感器的设计方案,满足了贴合压力工艺需求,解决了传统设备由于贴合压力过大或者过小而导致的产品质量问题。
46.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
47.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1