基于切片最优传输的点云精准配准方法
1.本发明涉及一种基于切片最优传输的点云精准配准方法,属于计算机视觉和图形学相结合的技术领域。
背景技术:
2.获取技术的发展已使高精准度获取场景、获取物体变得非常方便、快捷,点云数据是获取设备获取的物体形式。点云数据已应用在工业生产、精准农业、智能建造等许多方面。点云数据具有数据量大、难处理的特点。传统的全局方式仿射变化方法在处理现阶段的高精度点云数据存在配准精度低的缺陷。因此,点云准确匹配具有重要意义。
3.目前,计算点云最佳配准方案是在点云配准中首要解决的问题,下面简单介绍点云配准方案的相关问题。
4.1、点云配准方案是一个点对集合。传统求解点云配准方案采用icp算法。而icp算法中判断最佳点对的标准是两个点的欧氏距离最短,只考虑当前待匹配点,而忽略了目标点是否已被其他待匹配点所确定,所以通过icp算法获得的配准方案存在多对一的情况,即多个待匹配点与同一个目标点组成点对;在极端情况下,会出现所有待配准点对应到目标点云中的同一点,使缩放系数为0。本发明能够在快速计算点云最佳配准方案时确保目标点只与一个待匹配点组成点对,并使损失和达到最小值。
5.2、本发明对三维空间进行数据降维,用一维数据的最优传输求解拟合三维数据的求解工作,解决了直接对三维数据的点云团数据进行最优传输求解需要庞大的计算资源,时间复杂度高的问题,从而提高最优传输求解效率。
6.对于数据降维,本发明通过使用点云团在多个一维方向单位向量的投影集合代替直接对三维数据处理来减少最优传输的时间复杂度。
技术实现要素:
7.本发明的目的是针对大规模点云数据导致的配准不稳定以及计算效率低问题,给出一种基于切片最优传输的点云精准配准方法。
8.为实现上述目的,本发明采取的技术方案如下:
9.第一方面,本发明提供一种基于切片最优传输的点云精准配准方法,其包括如下步骤:
10.步骤1:备份待配准点云团cs为c
p
;
11.步骤2:对点云团c
p
和目标点云团cd的三维数据进行数据降维,生成一维直方图h
p
与hd;
12.步骤3:确定一维直方图h
p
与hd的sliced-wasserstein配准方案aw,即单射配准方案;
13.步骤4:根据配准方案aw更新点云团c
p
;
14.步骤5:重复步骤2至步骤4,重复次数为切片数ns;
15.步骤6:计算待配准点云团cs到点云团c
p
的缩放系数s,旋转矩阵mr,平移矩阵m
t
;
16.步骤7:重复步骤1至步骤6,重复次数为迭代数ni。
17.进一步的,所述步骤2的具体步骤如下:
18.步骤2.1:运用box-muller变换算法随机生成一个代表方向的三维单位向量分别计算点云团c
p
和目标点云团cd在方向向量的投影集合p
p
和pd;
19.步骤2.2:根据投影值分别对投影集合p
p
和pd进行升序排序,获得一维直方图h
p
和hd。
20.进一步的,所述步骤3的具体步骤如下:
21.步骤3.1:运用icp算法计算直方图h
p
和hd的最邻近配准方案an;
22.步骤3.2:缩小直方图h
p
和hd的sliced-wasserstein配准范围,h
p
待配准范围缩小至[i,k],记为h
″
p
,hd目标范围缩小至[j,l],记为h
″d;
[0023]
步骤3.3:运用icp算法计算直方图h
″
p
和h
″d的最邻近配准方案a
′n;
[0024]
步骤3.4:对直方图h
″
p
和h
″d的sliced-wasserstein配准进行子问题分割;
[0025]
步骤3.5:依次求解规模为1的子问题,将该问题的最邻近配准方案a
′n作为解;
[0026]
步骤3.6:并行求解剩余子问题。
[0027]
更进一步的,所述步骤3.2中,缩小流程如下:
[0028]
(3.21)若h
p
中存在小于hd最小值的部分,则该部分与从hd的最小值开始向右进行一对一的配准;
[0029]
(3.22)若h
p
中存在大于hd最大值的部分,则该部分与从hd的最大值开始向左进行一对一的配准;
[0030]
(3.23)记h
p
待配准的剩余部分为h
′
p
,h
′
p
中最小值为m
pmin
,h
′
p
中最大值为m
pmax
,即h
′
p
=[m
pmin
,m
pmax
],则对应的hd目标部分为h
′d,其中h
′d的最小值n
dmin
=an[m
pmin
],最大值为n
dmax
=an[m
pmax
],即h
′d=[n
dmin
,n
dmax
];
[0031]
(3.24)从h
′
p
的最小值开始,向右进行配准,直到an[mi]==an[m
i+1
]停止,其中pmin≤i≤pmax-1;记nj=an[mi],其中dmin≤j≤dmax;若i=pmax-1,an[mi]≠an[m
i+1
],则步骤3结束,得到sliced-wasserstein配准方案aw;
[0032]
(3.25)从h
′
p
的最大值开始,向左进行配准,直到an[mk]==an[m
k-1
]停止,其中pmin+1≤k≤pmax;记n
l
=an[mk],其中dmin≤l≤dmax;此时,h
p
待配准范围缩小至[i,k],记为h
″
p
,hd目标范围缩小至[j,l],记为h
″d。
[0033]
更进一步的,所述步骤3.4中,分割流程如下:
[0034]
(3.41)若h
″
p
的待配准点数小于20,则不进行子问题分割且步骤3.4结束;
[0035]
(3.42)将h
″
p
分割成若干子问题,初始每个子问题处理最多一个非单射点簇,即a
′n[mi]==a
′n[m
i+1
]==
…
==a
′n[mj],j-i≥1,并且h
″d中的a
′n[mi]分别向两边扩展j-i个空闲点,即未被配准方案an标记的点,作为该子问题的目标范围;若相邻子问题存在公共空闲点,则合并子问题,对应的目标范围进行对应的扩展。
[0036]
更进一步的,所述步骤3.6中,单个子问题求解流程如下:
[0037]
(3.61)记该子问题的待匹配直方图为h
″′
p
,规模为m,目标直方图为h
″′d,规模为n;
[0038]
(3.62)运用icp算法计算直方图h
″′
p
和h
″′d的最邻近配准方案a
″n;
[0039]
(3.63)若m==n,则按顺序对h
″′
p
和h
″′d进行一对一配准且步骤3.6结束;
[0040]
(3.64)若m==n-1,则在h
″′d中寻找一点ni作为空闲点,小于点ni的全部点从h
″′
p
的最小值开始一对一配准,大于点ni的全部点从h
″′
p
的最大值开始一对一配准,选择点ni的标准为选择结果是配准损失最小且步骤3.6结束;
[0041]
(3.65)若为其他情况,执行步骤3.2,以及步骤3.6中的流程(3.63)与(3.64);
[0042]
(3.66)重新计算最邻近配准方案,记为a
″′n,按升序顺序遍历待配准直方图,若当前点的左邻近点为空闲点,计算当前点以a
″′n作为配准结果的累计损失与a
″′n左移一位的累计损失,取累计损失小的作为当前点的配准方案,直至待配准直方图遍历结束。
[0043]
进一步的,所述步骤6的具体步骤如下:
[0044]
步骤6.1:计算点云团cs和c
p
的中心点,获得平移矩阵m
t
;
[0045]
步骤6.2:平移点云团cs和c
p
,使点云团cs和c
p
的中心点均处于坐标原点,记此时的点云团为c
′s和c
′
p
;
[0046]
步骤6.3:计算点云团c
′s和c
′
p
的协方差矩阵m
cov
;
[0047]
步骤6.4:对协方差矩阵m
cov
进行svd分解,计算旋转矩阵mr和缩放系数s。
[0048]
第二方面,本发明提供一种基于切片最优传输的点云精准配准装置,其包括:
[0049]
数据降维模块,用于对点云团和目标点云团的三维数据进行数据降维,生成一维直方图;
[0050]
配准模块,用于确定一维直方图的sliced-wasserstein配准方案;
[0051]
数据更新模块,用于根据配准方案更新点云团;
[0052]
数据处理模块,用于计算待配准点云团到点云团的缩放系数,旋转矩阵和平移矩阵。
[0053]
第三方面,本发明提供一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机可读指令,所述处理器执行所述计算机可读指令时实现上述第一方面方案中所述的点云精准配准方法。
[0054]
第四方面,本发明提供一种计算机可读存储介质,包括一个或多个存储有计算机可读指令的可读存储介质,所述计算机可读指令被一个或多个处理器执行时,使得所述一个或多个处理器执行上述第一方面方案中所述的点云精准配准方法。
[0055]
本发明的有益效果是:本发明给出一种基于切片最优传输的点云精准配准方法,快速计算从待匹配点云团到目标点云团的变换参数——缩放系数、旋转矩阵和平移矩阵,通过利用以下知识:待匹配点云团中的每个点都能在目标点云团中找到一个最优的空闲点,组成一个点对;以点对中两点的欧氏距离作为损失部分,则所有点对的损失和存在最小值,当损失和达到最小值时,此时的点对配准方案即最佳配准方案;根据最佳配准方案即可确定全局的点云变换参数。
[0056]
本发明能够在快速计算点云最佳配准方案时确保目标点只与一个待匹配点组成点对,并使损失和达到最小值。
[0057]
本发解决了直接对三维数据的点云团数据进行最优传输求解需要庞大的计算资源,时间复杂度高的问题,从而提高最优传输求解效率。可实现快速精确的点云配准;计算时间复杂度低。
[0058]
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变
得明显,或通过本发明的实践了解到。
附图说明
[0059]
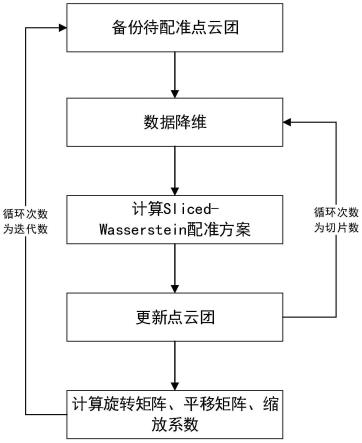
图1是本发明流程图。
[0060]
图2(a)是本发明所述缩小原则一。
[0061]
图2(b)是本发明所述缩小原则二。
[0062]
图3是本发明所述配准范围缩小终止状态。
[0063]
图4是本发明所述子问题分割与合并。
具体实施方式
[0064]
下面结合附图和具体实施例对本发明进行详细说明。
[0065]
本发明提供了一种基于切片最优传输的点云精准配准方法,下面对相关技术,方法进行介绍。
[0066]
一、相关技术
[0067]
本发明通过随机生成的方向单位向量作为切片依据,随机生成的方向单位向量服从正态分布,故采用boxmuller变换算法将计算机生成的服从均匀分布的随机数转化为服从正态分布的随机数,boxmuller变换公式如下所示:
[0068][0069]
其中,x1和x2均为在[0,1]上服从均匀分布的随机数。
[0070]
在点云配准中,icp算法是一种传统解法,假设待配准点云团为c
a1
,目标点云团为c
a2
,该算法的主要流程如下:(1)计算点云团c
a1
中每个点在点云团c
a2
中的最邻近点;(2)计算缩放系数,旋转矩阵和平移矩阵;(3)对点云团c
a1
作上步所得参数的变换,获得新点云团ca′1;(4)计算点云团ca′1与目标点云团c
a2
的平均距离,若小于一定阈值,迭代结束;否则更新点云团c
a1
为ca′1,执行(1)。通过icp算法获得的配准方案存在多对一的情况,在极端情况下,会出现所有待配准点对应到目标点云中的同一点,使缩放系数为0。
[0071]
wasserstein距离算法在解决最优传输问题的重要思想,该算法可以评估两个数据分布的相似程度,wasserstein距离的定义如下:
[0072][0073]
其中,ps为原数据分布,pd为目标数据分布,∏[ps,pd]为ps与pd所有可能的联合分布的集合,r(x,y)为联合分布函数,d(x,y)为损失函数。当w[ps,pd]达到最小时,此时的联合发布函数r(x,y)为最优传输问题的最优解。
[0074]
本发明利用boxmuller变换算法以及wasserstein距离算法完成了用一维数据的最优传输求解拟合三维数据的求解工作,解决了直接对三维数据的点云团数据进行最优传输求解需要庞大的计算资源,时间复杂度高,以及直接使用icp算法配准产生多对一劣质解的问题,从而提高最优传输求解效率与精确度。
[0075]
二、方法
[0076]
本发明的方法主要包括:首先,备份待配准点云团cs为c
p
;其次,对点云团c
p
和目标点云团cd的三维数据进行数据降维,生成一维直方图h
p
与hd;并确定一维直方图h
p
与hd的sliced-wasserstein配准方案aw(单射配准方案);根据配准方案aw更新点云团c
p
;最后,计算待配准点云团cs到点云团c
p
的缩放系数s,旋转矩阵mr,平移矩阵m
t
;当进行一定迭代次数后,点云团c
p
逐渐逼近目标点云团cd。具体流程图如图1所示,下面具体分析介绍:
[0077]
1、数据降维
[0078]
本发明运用box-muller变换算法随机生成一个代表方向的三维单位向量分别计算点云团c
p
和目标点云团cd在方向向量的投影集合p
p
和pd。再根据投影值分别对投影集合p
p
和pd进行升序排序,获得一维直方图h
p
和hd;本发明使用一系列的三维单位向量对三维空间进行分解,使三维数据的最优传输求解工作分解为一系列的一维数据的最优传输求解问题。
[0079]
2、确定sliced-wasserstein配准方案
[0080]
采用icp算法计算直方图h
p
和hd的最邻近配准方案an。
[0081]
通过如下两条原则,缩小直方图h
p
和hd的sliced-wasserstein配准范围。缩小原则如下:(1)若h
p
中存在小于hd最小值的部分,则该部分与从hd的最小值开始向右进行一对一的配准,如图2(a)所示。(2)若h
p
中存在大于hd最大值的部分,则该部分与从hd的最大值开始向左进行一对一的配准,如图2(b)所示。
[0082]
通过最邻近配准方案an,直方图h
p
和hd的sliced-wasserstein配准范围仍可以进一步的缩小。记h
p
待配准的剩余部分为h
′
p
,h
′
p
中最小值为m
pmin
,h
′
p
中最大值为m
pmax
,即h
′
p
=[m
pmin
,m
pmax
],则对应的hd目标部分为h
′d,其中h
′d的最小值n
dmin
=an[m
pmin
],最大值为n
dmax
=an[m
pmax
],即h
′d=[n
dmin
,n
dmax
];通过查询最邻近配准方案an,直方图h
p
缩小至h
′
p
=[m
pmin
,m
pmax
],直方图hd缩小至h
′d=[n
dmin
,n
dmax
]。从h
′
p
的最小值m
pmin
开始,向右进行配准,直到an[mi]==an[m
i+1
]停止,其中pmin≤i≤pmax-1;记nj=an[mi],其中dmin≤j≤dmax;若i=pmax-1,an[mi]≠an[m
i+1
],则sliced-wasserstein配准方案已计算结束,无需执行后续步骤,记sliced-wasserstein配准方案为aw。否则,从h
′
p
的最大值m
pmax
开始,向左进行配准,直到an[mk]==an[m
k-1
]停止,其中pmin+1≤k≤pmax;记n
l
=an[mk],其中dmin≤l≤dmax。此时,h
p
待配准范围缩小至[i,k],记为h
″
p
,hd目标范围缩小至[j,l],记为h
″d,如图3所示。
[0083]
采用icp算法重新计算直方图h
″
p
和h
″d的最邻近配准方案a
′n。对直方图h
″
p
和h
″d的sliced-wasserstein配准进行子问题分割。若h
″
p
的待配准点数小于20,则不进行子问题分割且步骤3.4结束;否则,将h
″
p
分割成若干子问题,初始每个子问题处理最多一个非单射点簇,即a
′n[mi]==a
′n[m
i+1
]==
…
==a
′n[mj],j-i≥1,并且h
″d中的a
′n[mi]分别向两边扩展j-i个空闲点(未被配准方案an标记的点)作为该子问题的目标范围;若相邻子问题存在公共空闲点,则合并子问题,对应的目标范围进行对应的扩展,如图4所示。
[0084]
子问题分割结束后,依次求解规模为1的子问题,将该问题的最邻近配准方案a
′n作为解。并行求解剩余子问题,其中单个子问题求解流程如下:(1)记该子问题的待匹配直方图为h
″′
p
,规模为m,目标直方图为h
″′d,规模为n;(2)运用icp算法计算直方图h
″′
p
和h
″′d的最邻近配准方案a
″n;(3)根据子问题的规模执行不同的方案。若m==n,则按顺序对h
″′
p
和h
″′d进行一对一配准且无需执行后续步骤;若m==n-1,则在h
″′d中寻找一点ni作为空闲
点,小于点ni的全部点从h
″′
p
的最小值开始一对一配准,大于点ni的全部点从h
″′
p
的最大值开始一对一配准且无需执行后续步骤,选择点ni的标准为选择结果是配准损失最小;若为其他情况,继续缩小待匹配直方图为h
″′
p
和目标直方图为h
″′d的配准范围,若结果的配准规模符合m==n或m==n-1,执行对应方案;否则重新计算最邻近配准方案,记为a
″′n,然后按升序顺序遍历待配准直方图,若当前点的左邻近点为空闲点,计算当前点以a
″′n作为配准结果的累计损失与a
″′n左移一位的累计损失,取累计损失小的作为当前点的配准方案,直至待配准直方图遍历结束。
[0085]
3、计算待配准点云团到目标点云团的缩放系数,旋转矩阵和平移矩阵
[0086]
计算点云团cs和c
p
的中心点,通过中心点的相对位置计算平移矩阵m
t
;根据点云团cs和c
p
的中心点平移点云团cs和c
p
,使点云团cs和c
p
的中心点均处于坐标原点,并记此时的点云团为c
′s和c
′
p
;计算点云团c
′s和c
′
p
的协方差矩阵m
cov
,并对协方差矩阵m
cov
进行svd分解获得旋转矩阵mr和缩放矩阵ms,计算缩放矩阵ms对角线元素累乘的算术平方根获得缩放系数s。
[0087]
综上,本发明为一种基于切片最优传输的点云精准配准方法,主要包括数据降维、确定sliced-wasserstein配准方案和计算待配准点云团到目标点云团的缩放系数,旋转矩阵和平移矩阵。
[0088]
以上显示和描述了本发明的基本原理、主要特征和优点。本领域的普通技术人员应该了解,上述实施例不以任何形式限制本发明的保护范围,凡采用等同替换等方式所获得的技术方案,均落于本发明的保护范围内。
[0089]
本发明未涉及部分均与现有技术相同或可采用现有技术加以实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1