一种将夹具机械坐标系与靶灯坐标系高精度标定的方法与流程
x
w3yw3zw3
),同时可得出夹具机械坐标系与三坐标坐标系的位姿信息旋转矩阵r1、平移矩阵t1;
10.步骤(4):在(o
w3-x
w3yw3zw3
)坐标系下选取n个点(p
w3
1-p
w3
n),选点时确保三坐标测头移动时测头与夹具不会有物理干涉;
11.步骤(5):通过三坐标测试软件pc-dmis将夹具机械坐标系(o
w3-x
w3yw3zw3
)下的(p
w3
1-p
w3
n)n个点转换到三坐标坐标系(o
w1-x
w1yw1zw1
)下对应的n个点(p
w1
1-p
w1
n);
12.步骤(6):将视觉测量系统的相机放到三坐标前方,以三坐标测头为中心,将相机按照一个扇形面左右视场
±
45
°
内,高低错落摆放3个高度,每个高度下均匀摆放5个位置,共有m个相机机位,m为1-15;每个机位下控制三坐标测头重复移动n个点位(p
w1
1-p
w1
n),此时辅助靶灯也会跟随三坐标测头在每个机位下重复移动n个位置(p
w2
1-p
w2
n);
13.步骤(7):每个机位移动后,视觉测量系统相机拍摄辅助靶灯(p
w2
1-p
w2
n)和夹具上的k个靶灯(pb1-pbk),通过对靶灯进行识别计算后得出在靶灯在相机坐标系(o
w4-x
w4yw4zw4
)下的一组坐标(p
w4
1-p
w4
i),i为一个机位所有靶灯个数,其中1—n为辅助靶灯,n+1—i为夹具上的靶灯;
14.步骤(8):根据第m个机位在辅助靶灯坐标系(o
w2-x
w2yw2zw2
)下的n个点和前2个机位的求解结果(从第三个机位开始计算),利用多视图几何原理,可得出每个机位相对初始机位的旋转矩阵rm和平移矩阵tm;
15.步骤(9):当m个机位都拍摄计算完成后,对所有机位位姿参数旋转矩阵rm、平移矩阵tm和辅助靶灯坐标系(o
w2-x
w2yw2zw2
)下的m组点进行整体优化,利用光束平差法建立所有视图中靶灯重投影误差累计和做小目标函数,表达式为:
[0016][0017]
具中pi为靶灯在(o
w2-x
w2yw2zw2
)坐标系下的三维坐标,p
ij
为第j个机位下拍摄的图像中对应实物靶灯pi的图像坐标;为第i个靶灯的三维坐标pi重投影到第j个图像平面的图像坐标,且这里的图像坐标是畸变校正后的结果;n指辅助靶灯移动的n个点位,k为夹具靶灯的总数;分别表示第j个机位的相机坐标系与初始机位相机坐标系下的旋转矩阵和平移矩阵,采用levenberg-marquardt迭代算法对式(1)中的优化变量和和进行优化求解;
[0018]
步骤(10):根据步骤9中得到的夹具上安装的k个靶灯在辅助靶灯坐标系(o
w2-x
w2yw2zw2
)的三维坐标(p
w2
n+1-p
w2
n+k),将k个靶灯的三维坐标导入到视觉测量系统内作为对应夹具的标定文件,后续视觉测量系统相机拍摄到校靶夹具上的k个靶灯后调用生成的标定文件就能够计算出辅助靶灯坐标系(o
w2-x
w2yw2zw2
)与相机的位姿关系,因辅助靶灯坐标系(o
w2-x
w2yw2zw2
)与夹具机械坐标系旋转矩阵为0,因此能够得出校靶夹具与视觉测量系统相机的角度信息,至此夹具机械坐标系与靶灯坐标系(位于校靶夹具上)的标定建立完成。
[0019]
本发明最大的创新是通过一种简单的坐标系转换方法解决了校靶夹具机械坐标系与靶灯坐标系高精度标定的难题。通过三坐标测量机测量完夹具机械安装定位基准后,建立夹具机械坐标系,通过引入与夹具机械坐标系平行的辅助靶灯坐标系,在靶灯标定时
直接将靶灯建立到与夹具机械坐标系平行的辅助靶灯坐标系下,实现了夹具机械坐标系与靶灯坐标系的高精度标定,该发明不再需要传统标定时第二步标定环节额外使用的高精度大型机床,只需要一台三坐标测量机一步标定即可完成,该发明具有通用性强,操作简单,效率高,精度高等优点,可适用于多种类型校靶夹具的标定。
附图说明
[0020]
图1本发明的方法流程图。
[0021]
图2校靶夹具结构示意图。
[0022]
图3辅助靶灯坐标系与夹具坐标系转换关系图。
具体实施方式
[0023]
传统标定方法分为2步标定,分别为靶灯标定和“靶”/“座”标定,靶灯标定时需要利用高精度三坐标测量机并标定得出夹具上安装的诺干个靶灯的三维坐标,并建立到靶灯坐标系,“靶”/“座”标定标定时需要通过高精度机床移动多个位置再结合机器视觉算法将夹具机械坐标系与靶灯坐标系进行关联标定。
[0024]
飞机校靶夹具体积较大且形状不规则无法安装到机床内,传统方法只能完成常规底座是平面的夹具,但飞机校靶夹具基本都不具备平面底座,因此传统标定方法无法满足飞机各类校靶夹具的统一标定,不具有通用性,且机床移动位置精度也达不到目前校靶精度的标定要求,2步标定环节会有误差累积和传递,导致最终标定误差过大。标定过程中需要使用高精度三坐标和高精度2台设备,造成了标定成本较高,操作复杂,精度无法满足现有飞机校靶精度的要求。
[0025]
本发明针对上述设备测试功能和现有技术的不足,提供了一种将夹具机械坐标系与靶灯坐标系高精度标定的方法,包括如下步骤:
[0026]
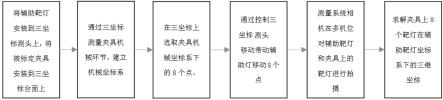
步骤(1):将校靶夹具(校靶夹具示意图见图2)安装固定到高精度的三坐标台面上,此时得到三坐标坐标系(o
w1-x
w1yw1zw1
),并在三坐标测头上安装一个与校靶夹具上led靶灯型号相同的靶灯,后续称为辅助靶灯;
[0027]
步骤(2):辅助靶灯安装到三坐标测头后,因辅助靶灯为一个点光源,跟随三坐标测头移动后可得到与三坐标三轴平行的辅助靶灯坐标系(o
w2-x
w2yw2zw2
),该坐标系与三坐标坐标系(o
w1-x
w1yw1zw1
)旋转矩阵r为0,只有固定的平移矩阵t;
[0028]
步骤(3):通过三坐标测量校靶夹具与托架安装时的相关机械环节(即夹具上与安装托架相连接的那部分的孔销直接、位置度、距离等),建立得出夹具机械坐标系(o
w3-x
w3yw3zw3
),同时可得出夹具机械坐标系与三坐标坐标系的位姿信息旋转矩阵r1、平移矩阵t1;
[0029]
步骤(4):在(o
w3-x
w3yw3zw3
)坐标系下选取8个点(p
w3
1-p
w3
8),选点时确保三坐标测头移动时测头与夹具不会有物理干涉;
[0030]
步骤(5):通过三坐标测试软件pc-dmis将夹具机械坐标系(o
w3-x
w3yw3zw3
)下的(p
w3
1-p
w3
8)8个点转换到三坐标坐标系(o
w1-x
w1yw1zw1
)下对应的8个点(p
w1
1-p
w1
8);
[0031]
步骤(6):将视觉测量系统的相机放到三坐标前方,以三坐标测头为中心,将相机按照一个扇形面左右视场
±
45
°
内,高低错落摆放3个高度,相邻高度之间相差20至30cm,每
个高度下均匀摆放5个位置,共有m个相机机位,m为1-15;每个机位下控制三坐标测头重复移动8个点位(p
w1
1-p
w1
8),此时辅助靶灯也会跟随三坐标测头在每个机位下重复移动8个位置(p
w2
1-p
w2
8);
[0032]
步骤(7):每个机位移动后,视觉测量系统相机拍摄辅助靶灯(p
w2
1-p
w2
8)和夹具上的靶灯(pb1-pbk),通过对靶灯进行识别计算后得出在靶灯在相机坐标系(o
w4-x
w4yw4zw4
)下的一组坐标(p
w4
1-p
w4
i),i为一个机位所有靶灯个数,其中1-8为辅助靶灯,9-i为夹具上的靶灯;
[0033]
步骤(8):根据第m(m为1-15)个机位在辅助靶灯坐标系(o
w2-x
w2yw2zw2
)下的8个点和前2个机位的求解结果,利用多视图几何原理,可得出每个机位相对初始机位的旋转矩阵rm和平移矩阵tm;
[0034]
步骤(9):当m个机位都拍摄计算完成后,对所有机位位姿参数旋转矩阵rm、平移矩阵tm和辅助靶灯坐标系(o
w2-x
w2yw2zw2
)下的m组点进行整体优化,利用光束平差法建立所有视图中靶灯重投影误差累计和做小目标函数,表达式为:
[0035][0036]
具中pi为靶灯在(o
w2-x
w2yw2zw2
)坐标系下的三维坐标,p
ij
为第j个机位下拍摄的图像中对应实物靶灯pi的图像坐标;为第i个靶灯的三维坐标pi重投影到第j个图像平面的图像坐标,且这里的图像坐标是畸变校正后的结果;n指辅助靶灯移动的8个点位,k为夹具靶灯的总数8个(图3中靶灯坐标系可见8个靶灯);分别表示第j个机位的相机坐标系与初始机位相机坐标系下的旋转矩阵和平移矩阵,采用levenberg-marquardt迭代算法对式(1)中的优化变量和和进行优化求解;
[0037]
步骤(10):根据步骤9中得到的夹具上安装的8个靶灯在辅助靶灯坐标系(o
w2-x
w2yw2zw2
)的三维坐标(p
w2
9-p
w2
16),将8个靶灯点的三维坐标导入到视觉测量系统内作为对应夹具的标定文件,后续视觉测量系统相机拍摄到校靶夹具上的8个靶灯后调用生成的标定文件就能够计算出辅助靶灯坐标系(o
w2-x
w2yw2zw2
)与相机的位姿关系,因辅助靶灯坐标系(o
w2-x
w2yw2zw2
)与夹具坐标系旋转矩阵为0,因此能够得出校靶夹具与视觉测量系统相机的角度信息,至此夹具机械坐标系与靶灯坐标系的标定建立完成。
[0038]
步骤(9)、(10)可参考文献杨博文,张丽艳,叶南.机载设备安装姿态视觉校准中的靶板标定[j].光学精密工程,2014,22(9):2312。
[0039]
本发明公开了一种夹具机械坐标系与靶灯坐标系高精度标定的方法,包括夹具机械坐标系建立、靶灯坐标系建立和机械坐标系与靶灯坐标系的高精度转换,该方法减少了传统方法标定时对设备的类型,大幅度提高了标定精度和效率,具有通用性强,操作简单。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1