一种湖冰表面线性形态提取方法
1.本发明涉及遥感地学应用技术领域,具体涉及一种湖冰表面线性形态提取方法。
背景技术:
2.湖冰是冰冻圈的重要组成部分,在区域水资源、气候变化、生态调节、交通运输和人类冰上活动安全等方面具有重要意义。湖冰表面受到热动力和水动力的共同作用产生冰脊、裂缝等线性形态,影响冰面稳定性和承载力,进而对人类冰上活动和娱乐活动构成安全威胁。传统的观测方法主要依赖于人眼观察和现场测量,对测量员的专业经验和仪器要求高,耗时耗力,且受限于观测视野,无法实现快速、同步、大范围地获取湖冰表面形态信息。
技术实现要素:
3.本发明针对现有技术的缺点,设计了一种湖冰表面线性形态提取方法,利用空间滤波、分形理论、边缘检测等方法搭建湖冰表面线性形态的遥感信息提取方法,并提出定量指标及其计算方法,并据其获取线性结构的长度和角度信息,与目视解译的结果具有高度的一致性高,可靠性高,能够有效、快速提取湖冰表面线性形态信息。
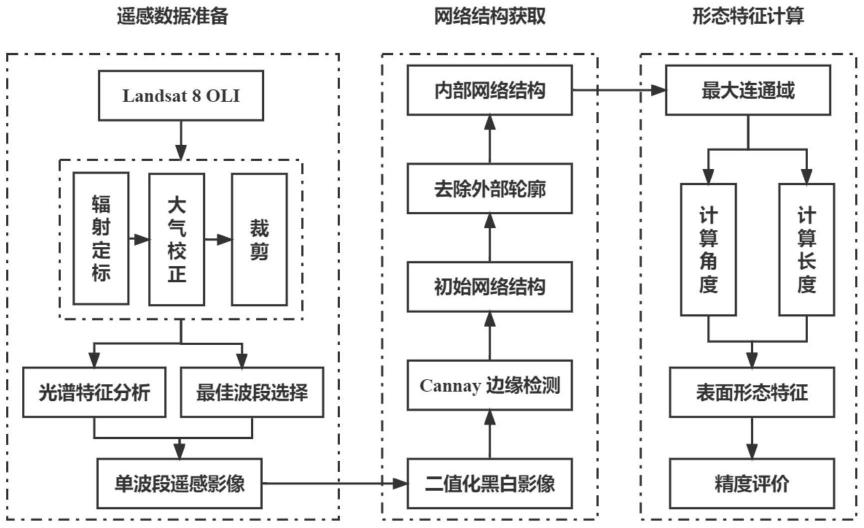
4.本发明公开的技术方案如下:一种湖冰表面线性形态提取方法,包括以下步骤:第一步:选取冰面影像,进行辐射校正、大气校正和地理配准图像预处理;第二步:基于湖冰光谱特征选择对水体敏感的波段,生成单波段影像及其二值化影像;第三步:通过canny边缘检测算子获取湖冰表面形态的网络结构和边缘点,以像元为单位判定边缘点是否跨越二值化影像,如果跨越,则去除,最终获取湖冰表面形态的内部网络线性形态;第四步:去除网络结构的边缘,利用matlab开发软件的imdilate、imfill函数对图像内部网络进行膨胀、填充再腐蚀处理,保证细小且相近的网络结点联系起来,形成完整的内部网络结构;第五步:确定并提取内部网络结构的最大连通域轮廓;第六步:找到最大连通域轮廓的南端和北端,计算南端到北端的多个路径长度,确定最短的路径为湖冰表面线性形态的长度;第七步:连接南端和北端两点成一条直线,计算其与正北方向的夹角,即湖冰表面线性形态的角度。
5.在上述方案的基础上,作为优选,选取冰封期云覆盖低于10%的landsat遥感影像。
6.在上述方案的基础上,作为优选,去除网络结构的边缘,调用matlab软件中的imdilate函数对图像进行膨胀处理;其次,利用matlab工具中的imfill函数对膨胀后的图像进行孔洞填充处理;最后,利用matlab工具中的imfill函数对孔洞填充后的图像进行腐蚀处理。
7.在上述方案的基础上,作为优选,通过监测长时序湖冰表面线性形态的长度和角
度用于评估冰面的承载力。
8.与现有技术相比,本发明具有以下有益效果:获取湖冰表面线性形态的角度和长度对冰面承载力评估、冰上作业与娱乐活动安全防护具有重要意义,具有有益效果如下:第一:本发明利用空间滤波、分形理论、边缘检测等方法搭建湖冰表面线性形态的遥感信息提取方法,并提出定量指标及其计算方法,并据其获取线性结构的长度和角度信息,与目视解译的结果具有高度的一致性高,可靠性高,能够有效提取湖冰表面线性形态信息。
9.第二:本发明基于光学遥感数据获取湖冰表面线性形态的角度和长度,自动提取精度高,可用于评估冰面的承载力,为冰上运输和人类娱乐活动场所选址提供技术参数,避开冰面危险区域。
10.第三:本发明提取和运算过程通过matlab编程实现,降低提取过程对人工经验的依赖程度,提高了工作效率。可以在大尺度、长时间序列的湖冰动态遥感监测中,准确获取湖冰表面形态的变化过程。
附图说明
11.图1是湖冰表面线性形态遥感提取算法的流程图。
12.图2是湖冰表面线性形态遥感提取算法的提取结果。
13.图3算法应用在查干湖2018-2019年冬季四景遥感影像的湖冰表面线性形态提取及验证结果。时间依次为2018年12月8日、2019年1月25日、2019年2月26日和2019年3月14日。其中,第一列为oli原始影像,第二列为湖冰表面线性形态的自动提取结果,第三列为湖冰线性表面形态的目视解译结果。
14.图4是发明提出的算法和目视解译提取查干湖湖冰表面线性形态的精度对比,数据获取时间为2018年12月18日。
15.图5是算法应用在贝尔湖2018-2019年冬季景遥感影像的湖冰表面线性形态提取及验证结果。时间依次为2019年1月12日、2019年2月13日和2019年3月1日。其中,第一列为oli原始影像,第二列为湖冰表面线性形态的自动提取结果,第三列为湖冰线性表面形态的目视解译结果。
16.图6发明提出的算法和目视解译提取贝尔湖湖冰表面线性形态的精度对比。
具体实施方式
17.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
18.本发明采用四景landsat 8 oli作为示例数据,由美国地质调查局(usgs)免费提供(网址:http://glovis.usgs.gov/),行列号分别为119和29,完全覆盖查干湖流域。landsat 8 oli数据空间分辨率30 m,时间分辨率16天,获取时间分别为2018年12月8日。
19.图1为湖冰表面线性形态遥感信息提取方法流程图,该方法的具体实施步骤包括
以下内容。
20.第一步:选取冰封期云覆盖低于10%的landsat卫星遥感影像,2018-2019年冬季查干湖满足条件的影像有四景,图2以2018年12月8日的landsat卫星遥感影像为例说明算法实施过程。
21.第二步:完成landsat 8 oli遥感影像的预处理,包括辐射校正、大气校正和地理配准。基于湖冰光谱特征,确定波长范围为450
–
515nm的蓝波段为最佳敏感波段。生成的单波段影像及其二值化影像分别如图2(a)和图2(b)所示。
22.第三步:通过canny边缘检测算子获取2018年12月8日湖冰表面形态的网络结构和边缘点,以像元为单位判定边缘点是否跨越二值化影像。如果跨越,则去除。最终获取湖冰表面形态的内部网络结构如图2(c)所示。
23.第四步:去除网络结构的边缘,调用matlab软件中的imdilate函数对图像进行膨胀处理;其次,利用matlab工具中的imfill函数对膨胀后的图像进行孔洞填充处理;最后,利用matlab工具中的imfill函数对孔洞填充后的图像进行腐蚀处理,获取的内部结构如图2(d)所示。
24.第五步:确定内部网络结构的最大连通域,并提取最大连通域的轮廓,如图2(e)所示。
25.第六步:找到轮廓的南端和北端,即y值最大和x值最小的两个轮廓点,计算南端到北端的多个路径长度,确定最短的路径为湖冰表面线性形态的长度,如图2(f)所示。
26.第七步:连接南端和北端两点成一条直线,计算按照顺时针方向计算其与正北方向的夹角,得到线性形态的角度。湖冰表面线性形态的长度和角度可以用于评估冰面承载力。
27.如图3-4所示,本发明提出的自动提取算法应用在查干湖2018-2019年冬季四景遥感影像,时间依次为2018年12月8日、2019年1月25日、2019年2月26日和2019年3月14日。可知自动提取的查干湖湖冰表面线性形态的角度平均值为335.48
°±
0.23
°
,长度平均值为21141.57
±
68.36m;基于目视解译提取的湖冰表面线性形态角度平均值为338.10
°
,长度平均值为23087.21 m。对比发现自动提取与目视解译的湖冰表面线性形态角度r2和mar分别为0.96和3.99%,自动提取与目视解译的湖冰表面线性形态长度r2分别为0.98和2.48%。
28.如图5-6所示,本发明提出的自动提取算法应用在贝尔湖2018-2019年冬季三景遥感影像,时间分别为2019年1月12日、2019年2月13日和2019年3月1日。从图6可知,算法提取的贝尔湖湖冰表面线性形态的角度平均值为66.80
°±
0.45
°
,长度平均值为12748.02
±
872.82m;基于目视解译提取的湖冰表面线性形态角度平均值为59.35
°
,长度平均值为12621.00
±
874.52 m。对比发现自动提取与目视解译的湖冰表面线性形态角度r2和mae分别为0.98和1.7%,自动提取与目视解译的湖冰表面线性形态长度r2和mae分别为0.95和6.4%。
29.综合自动提取算法在查干湖和贝尔湖区的精度验证结果,说明自动提取的结果与目视解译的结果具有高度的一致性高,可靠性高,能够有效提取湖冰表面线性形态信息。
30.应当说明的是,上述实施例均可根据需要自由组合。以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1