月球基本地貌形态类型的划分方法和装置
1.本发明属于测绘技术领域,特别涉及一种月球基本地貌形态类型的划分方法和划分装置。
背景技术:
2.随着我国航空航天技术的发展,对地貌的研究也逐渐走向深空。月球作为我国深空探测的首站,其地貌研究是一项重要的科技基础工作。月球地貌填图是综合表达月球地貌形态、成因、物质、年龄等地貌信息的过程,最终生成一张能够直观表示月球地貌类型与分布等地质地貌信息的图件,是月球地貌研究的基础性底图。但是,与地球地貌研究相比,月球地貌的研究才刚刚起步。
3.提出了基于形态和年代两大类特征的全月球形貌类型的矩阵式多级分类方法,对月球地貌分类具有重要的参考价值。这一分类方法借鉴地球地貌的分类体系与分类方法,综合考虑形貌特征、物质组成以及地质年龄等多个指标对月貌进行分类。以上研究虽然基于高程分级或起伏度分级对月球基本地貌类型的划分进行了研究,但是仍然存在很大的问题:
4.首先,先前的研究对月球基本地貌形态的确定仅考虑高程分级或者起伏度分级,对月球地貌的认识是片面的,对大比例尺的月球地貌图编制来说其“科学尺度”过于粗糙;
5.此外,高程和起伏度是月球地貌形态的两大重要指标,先前的研究在进行月球地貌类型的划分时并没有将两者进行有机结合;
6.最后,如何在像元尺度上考虑高程和起伏度分级,对月球基本地貌形态进行划分尚属研究空白。
技术实现要素:
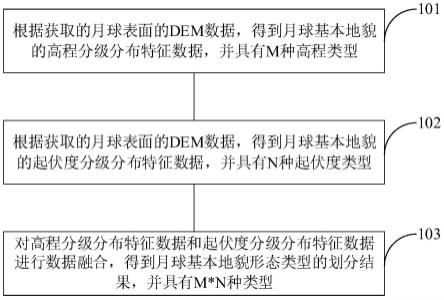
7.为了解决上述问题,本发明一方面提供了一种月球基本地貌形态类型的划分方法,其包括:根据获取的月球表面的dem数据,得到月球基本地貌的高程分级分布特征数据,并具有m种高程类型;根据获取的月球表面的dem数据,得到月球基本地貌的起伏度分级分布特征数据,并具有n种起伏度类型;对所述高程分级分布特征数据和所述起伏度分级分布特征数据进行数据融合,得到月球基本地貌形态类型的划分结果,并具有m*n种类型,所述划分结果用于研究月球表面。
8.在如上所述的划分方法中,可选地,所述根据获取的月球表面的dem数据,得到月球基本地貌的高程分级分布特征数据,并具有m种高程类型,包括:获取月球表面的dem数据;根据第一高程阈值、第二高程阈值、第三高程阈值、第四高程阈值以及与各高程阈值对应的编码代码值对月球表面的dem数据进行重分类,得到月球基本地貌的高程分级分布特征数据;其中,m=5,比高程阈值的数量大1。
9.在如上所述的划分方法中,可选地,所述第一高程阈值为-2500m,所述第二高程阈值为-1500m,所述第三高程阈值为1000m,所述第四高程阈值为3000m。
10.在如上所述的划分方法中,可选地,所述根据获取的月球表面的dem数据,得到月球基本地貌的起伏度分级分布特征数据,并具有n种起伏度类型,包括:获取月球表面的dem数据;根据第一起伏度阈值、第二起伏度阈值、第三起伏度阈值、第四起伏度阈值、第五起伏度阈值、第六起伏度阈值以及与各起伏度阈值对应的编码代码值对月球表面的dem数据进行重分类,得到月球基本地貌的起伏度分级分布特征数据;其中,n=7,比起伏度阈值的数量大1。
11.在如上所述的划分方法中,可选地,所述第一起伏度阈值为100m,所述第二起伏度阈值为200m,所述第三起伏度阈值为300m,所述第四起伏度阈值为700m,所述第五起伏度阈值为1500m,所述第六起伏度阈值为2500m。
12.在如上所述的划分方法中,可选地,所述对所述高程分级分布特征数据和所述起伏度分级分布特征数据进行数据融合,得到月球基本地貌形态类型的划分结果,并具有m*n种类型,包括:将所述高程分级分布特征数据和所述起伏度分级分布特征数据进行像元级别的矩阵组合,得到月球基本地貌形态类型的划分结果;其中,m=5,n=7。
13.另一方面提供了一种月球基本地貌形态类型的划分装置,其包括:第一得到模块,用于根据获取的月球表面的dem数据,得到月球基本地貌的高程分级分布特征数据,并具有m种高程类型;第二得到模块,用于根据获取的月球表面的dem数据,得到月球基本地貌的起伏度分级分布特征数据,并具有n种起伏度类型;第三得到模块,用于对所述高程分级分布特征数据和所述起伏度分级分布特征数据进行数据融合,得到月球基本地貌形态类型的划分结果,并具有m*n种类型,所述划分结果用于研究月球表面。
14.在如上所述的划分装置中,可选地,所述第一得到模块包括:第一获取单元,用于获取月球表面的dem数据;第一得到单元,用于根据第一高程阈值、第二高程阈值、第三高程阈值、第四高程阈值以及与各高程阈值对应的编码代码值对月球表面的dem数据进行重分类,得到月球基本地貌的高程分级分布特征数据;其中,m=5,比高程阈值的数量大1;所述第一高程阈值为-2500m,所述第二高程阈值为-1500m,所述第三高程阈值为1000m,所述第四高程阈值为3000m。
15.在如上所述的划分装置中,可选地,所述第二得到模块包括:第二获取单元,用于获取月球表面的dem数据;第二得到单元,用于根据第一起伏度阈值、第二起伏度阈值、第三起伏度阈值、第四起伏度阈值、第五起伏度阈值、第六起伏度阈值以及与各起伏度阈值对应的编码代码值对月球表面的dem数据进行重分类,得到月球基本地貌的起伏度分级分布特征数据;其中,n=7,比起伏度阈值的数量大1;所述第一起伏度阈值为100m,所述第二起伏度阈值为200m,所述第三起伏度阈值为300m,所述第四起伏度阈值为700m,所述第五起伏度阈值为1500m,所述第六起伏度阈值为2500m。
16.在如上所述的划分装置中,可选地,所第三得到模块包括:将所述高程分级分布特征数据和所述起伏度分级分布特征数据进行像元级别的矩阵组合,得到月球基本地貌形态类型的划分结果;其中,m=5,n=7。
17.本发明实施例提供的技术方案带来的有益效果是:
18.本文针对如何在像元尺度上确定月球基本地貌形态类型提出了一种基于矩阵运算的方法,该方法基于月表数字高程模型dem数据,耦合高程分级和伏度分级两种方法,得到全月基本地貌形态类型。
附图说明
19.图1为本发明实施例提供的一种月球基本地貌形态类型的划分的流程示意图;
20.图2为本发明实施例提供的另一种月球基本地貌形态类型的划分的流程示意图;
21.图3为本发明实施例提供的一种lq18图幅区域地形数据的示意图;
22.图4为本发明实施例提供的一种lq18图幅区域的高程分级分布特征示意图;
23.图5为本发明实施例提供的一种lq18图幅区域的起伏度分级分布特征示意图;
24.图6为本发明实施例提供的一种lq18图幅区域的月球基本地貌形态类型分布;
25.图7为本发明实施例提供的一种月球基本地貌形态类型的划分装置的结构示意图;
26.图8为本发明实施例提供的一种全月均值变点法预分析结果的示意图;
27.图9为本发明实施例提供的一种全月均值变点法精确分析结果的示意图。
具体实施方式
28.下面将参考附图并结合实施例来详细说明本发明。
29.参见图1-2,本发明实施例提供了一种月球基本地貌形态类型的划分方法,其包括以下步骤:
30.步骤101,根据获取的月球表面的dem数据,得到月球基本地貌的高程分级分布特征数据,并具有m种高程类型。
31.具体地,获取月球表面的dem数据,设置4种高程阈值,分别为第一高程阈值、第二高程阈值、第三高程阈值、第四高程阈值,此时m=5,5种高程类型分别对应:《第一高程阈值、[第一高程阈值,第二高程阈值)、[第二高程阈值,第三高程阈值)、[第三高程阈值,第四高程阈值)、≥第四高程阈值,然后根据该4种高程阈值以及与各高程阈值对应的编码代码值对月球表面的dem数据进行重分类,得到月球基本地貌的高程分级分布特征数据。
[0032]
可以基于月球激光测高探测器(lunar orbiter laser altimeter,lola)获取的测高点数据和selene tc(terrain camera)获取的立体相机数据融合生成的更高分辨率的数字高程模型(sldem2015),即月球表面的dem数据,sldem2015的数据分辨率约为59米/像素(mpp),本文以1:250万地质图分幅中的lq18分幅为例进行说明。由于lq18位于低纬度区域,采用了墨卡托投影,图3为该图幅的地形特征图,该图幅的高程范围为-4168m至4797m。经研究,月表高程的分类标准中各高程阈值优选为以下数值:第一高程阈值为-2500m,第二高程阈值为-1500m,第三高程阈值为1000m,第四高程阈值为3000m。
[0033]
基于以上数据对月表地形数据进行重分类,实现lq18区域基于像元尺度的栅格数据的重分类,得到高程的栅格分级结果。参见图4,将lq18图幅区域分为极低海拔地貌类型(对应《-2500m)、低海拔地貌类型(对应[-2500m,-1500m))、中海拔地貌类型(对应[-1500m,1000m))、高海拔地貌类型(对应[1000m,3000m))以及极高海拔地貌类型(对应3000m以上),其编码代码从极低海拔到极高海拔分别为1,2,3,4,5。
[0034]
步骤102,根据获取的月球表面的dem数据,得到月球基本地貌的起伏度分级分布特征数据,并具有n种起伏度类型。
[0035]
具体地,获取月球表面的dem数据,设置6种高程阈值,分别为:第一起伏度阈值、第二起伏度阈值、第三起伏度阈值、第四起伏度阈值、第五起伏度阈值、第六起伏度阈值,此时
n=7,7种起伏度类型分别对应:《第一起伏度阈值、[第一起伏度阈值,第二起伏度阈值)、[第二起伏度阈值,第三起伏度阈值)、[第三起伏度阈值,第四起伏度阈值)、[第四起伏度阈值,第五起伏度阈值)、[第五起伏度阈值,第六起伏度阈值)、≥第六高程阈值,然后根据该6种起伏度阈值以及与各起伏度阈值对应的编码代码值对月球表面的dem数据进行重分类,得到月球基本地貌的起伏度分级分布特征数据。
[0036]
获取月球表面的dem数据,可以参见上述步骤101中的相关描述,此处不再赘述。经研究,月表起伏度的分类标准中各起伏度阈值优选为以下数值:第一起伏度阈值为100m,第二起伏度阈值为200m,第三起伏度阈值为300m,第四起伏度阈值为700m,第五起伏度阈值为1500m,第六起伏度阈值为2500m。
[0037]
基于月球表面最佳起伏度窗口,利用lq18区域的dem数据计算得到月球表面lq18区域的起伏度数据,然后根据月球起伏度分级标准,利用lq18图幅的起伏度数据实现月表起伏度在像元尺度上的栅格数据的重分类。具体地,参见图5,生成了lq18图幅区域的月表起伏度分级分布特征数据,分为:微起伏平原(<100m)、微起伏台地[100m,200m)、微小起伏丘陵[200m,300m)、小起伏山地[300m,700m)、中起伏山地[700m,1500m)、大起伏山地[1500m,2500m)及极大起伏山地(≥2500m)七个地貌类型,其编码代码从微起伏平原到极大起伏山地分别为1,2,3,4,5,6,7。
[0038]
地形起伏度也称为地势起伏度、相对高度。地形起伏度是给定区域单元内高程差值,起伏度会随着计算窗口的变化,其值在一定范围内改变,具有一定的尺度依赖性。因此,月球地貌起伏度分级的首要工作和关键是计算起伏度的最佳窗口。确定一个合适的分析窗口半径或分析区域,使得在宏观范围内的起伏度能够准确反映月表的起伏状况。窗口分析的原理是通过计算输入像元周围指定邻域内的值的统计数据,其分析窗口主要有矩形窗口、圆形窗口、环形窗口、扇形窗口等。考虑到月球上最多的地貌类型是撞击坑,因此考虑使用圆形窗口而非矩形窗口对月表起伏度最佳窗口进行确定。
[0039]
在本实施例中以均值变点分析法来确定月表起伏度的最佳计算窗口。首先计算分析窗口下单位面积上的平均地形起伏度ra,对其取对数构建样本序列ras;然后将样本分为两段ras1,ras2,
…
rasi和ras
i+1
,ras
i+2
,
…
rasn,计算每段样本的算数平均值和及原始样本的方差s和分段后的方差统计量si,求得使该两者统计量之间差值最大的变点i,即为起伏度的最佳窗口,具体的计算过程如下:
[0040]
1)首先计算不同分析窗口i下的地形起伏度rai和单位面积上的平均地形起伏度,并取对数记为rasi,ras
ij
即为构建的样本序列值(j=1,2,...,n)。
[0041]
rasi=ln(rai/(πi2))(1)
[0042]
ras={ras
ij
,j=1,2,3......n}(2)
[0043]
2)计算样本序列的平均值和方差s,计算公式如下:
[0044][0045][0046]
3)在窗口i下,将样本x分为两段,ras
i1
,ras
i2
,
…
ras
it
和ras
it+1
,ras
it+2
,
…
ras
in
,
分别计算两段样本的平均值和以及两段样本的离差平方和的差si。
[0047][0048][0049][0050]
4)计算原始样本的方差s和分段后的方差统计量si之间的差值求使得值最大的窗口i,即为全月起伏度计算的最佳窗口。
[0051][0052]
圆形窗口的计算以栅格像元为基本单位,由于月球表面起伏较大,且全月计算的数据量较大,为了准确确定起伏度的最佳计算窗口,本文采用两次均值变点分析方法来计算。第一次应用均值变点分析法预估最佳起伏度的可能窗口,起始窗口为半径为5个像元的圆形窗口,步长为5,计算至500个像元内的平均起伏度以及对应的统计量,得到最佳起伏度窗口对应的像元数。i分别为5,10,15......500,计算这些窗口内的起伏度值并绘制曲线找到变点。在结果分析中确定了最佳窗口为125个像元,第二次利用均值变点分析法进行最佳起伏度窗口的精确分析,起始窗口为1个像元,步长为1,计算至预分析中得到的最佳起伏度窗口像元数量的两倍,也即是250,得到最佳起伏度窗口对应的像元数的精确值,i指代的是1,2,3,......,250。
[0053]
本实施例中采用两次均值变点分析法对月表起伏度计算的最佳窗口进行研究,图8-9为基于全月dem数据利用均值变点法预分析结果及精确分析结果,其中图中的横坐标为像元。起伏度最佳计算窗口的预分析结果表明,月表起伏度计算的最佳窗口为直径为125个像元的圆形区域。在精确分析中,以半径为1个像元的圆形窗口为起始窗口,步长p=1,依次计算248个像元大小,得到最佳起伏度窗口对应半径的精确值为62个像元大小,因此,以半径为62个像元的圆形窗口来计算整个月表的地形起伏度。
[0054]
步骤103,对高程分级分布特征数据和起伏度分级分布特征数据进行数据融合,得到月球基本地貌形态类型的划分结果,并具有m*n种类型。
[0055]
具体地,将重分类之后的高程分级栅格数据(即高程分级分布特征数据)和起伏度分级栅格数据(即起伏度分级分布特征数据)进行像元级别的矩阵组合,得到月球基本地貌形态类型的划分结果。参见图6,可以生成lq18图幅区域的月表的基本地貌形态类型,lq18图幅区域的的基本地貌形态类型共有34种。
[0056]
可以是对分级后的高程数据的每个像元值乘10,将结果与分级后的起伏度数据进行叠加计算,得到的栅格数据像元值即为编码值,矩阵组合后的编码值所代表的即为月球表面的基本形态地貌类型,具体参见表1,海拔一项中有编码代码值1-5,起伏度一项中有编码代码值1-7,组合后有编码代码值:11-17、21-27、31-37、41-47、51-57,共35种,即5*7。在这个尺度上是基于像元实现的,因此本划分方法以像元为基准的矩阵组合方法。
[0057]
表1月球基本地貌分类及编码
[0058][0059]
基于高程和起伏度的数据融合得到月球表面具有高程信息和起伏度特征的地貌单元,这属于月球的形态地貌类型,是构建月球地貌等级分类体系中的重要一环。月球地貌等级分类体系借鉴地球地貌的分类体系与分类方法,综合考虑基本形态、主导成因、作用方式、地貌形态、微形态、地貌实体坡面陡缓特征等多个指标构建月表形貌划分方案以及月球地貌的等级分类体系。撞击坑是月球表面覆盖最广最多的撞击成因的地貌类型,以撞击坑为例进行说明。高程和起伏度的分级确定了撞击坑的基本形态特征,比如高海拔中起伏撞击坑。撞击坑基于其地貌形态可以分为简单型、过渡型和复杂型撞击坑,考虑其主导成因为撞击作用,针对某一个特定撞击坑实体单元而已,其地貌类型为高海拔中起伏撞击成因的简单撞击坑。因此,本方法中提到的融合对于月球形貌划分和等级分类方案的构建具有重要参考价值,从而能够对月球地貌进行更好的研究,提高研究成果。
[0060]
参见图7,本发明实施例提供了一种月球基本地貌形态类型的划分装置,其包括:第一得到模块201、第二得到模块202和第三得到模块203。第一得到模块201用于根据获取的月球表面的dem数据,得到月球基本地貌的高程分级分布特征数据,并具有m种高程类型。第二得到模块202用于根据获取的月球表面的dem数据,得到月球基本地貌的起伏度分级分布特征数据,并具有n种起伏度类型。第三得到模块203用于对高程分级分布特征数据和起伏度分级分布特征数据进行数据融合,得到月球基本地貌形态类型的划分结果,并具有m*n种类型,划分结果用于研究月球表面。
[0061]
可选地,第一得到模块包括:第一获取单元和第一得到单元。第一获取单元用于获取月球表面的dem数据。第一得到单元用于根据第一高程阈值、第二高程阈值、第三高程阈值、第四高程阈值以及与各高程阈值对应的编码代码值对月球表面的dem数据进行重分类,
得到月球基本地貌的高程分级分布特征数据,其中,m=5,比高程阈值的数量大1,第一高程阈值为-2500m,第二高程阈值为-1500m,第三高程阈值为1000m,第四高程阈值为3000m。
[0062]
可选地,第二得到模块包括:第二获取单元和第二得到单元。第二获取单元用于获取月球表面的dem数据。第二得到单元用于根据第一起伏度阈值、第二起伏度阈值、第三起伏度阈值、第四起伏度阈值、第五起伏度阈值、第六起伏度阈值以及与各起伏度阈值对应的编码代码值对月球表面的dem数据进行重分类,得到月球基本地貌的起伏度分级分布特征数据;其中,n=7,比起伏度阈值的数量大1;第一起伏度阈值为100m,第二起伏度阈值为200m,第三起伏度阈值为300m,第四起伏度阈值为700m,第五起伏度阈值为1500m,第六起伏度阈值为2500m。
[0063]
可选地,所第三得到模块包括:将高程分级分布特征数据和起伏度分级分布特征数据进行像元级别的矩阵组合,得到月球基本地貌形态类型的划分结果;其中,m=5,n=7。
[0064]
需要说明的是:上述实施例提供的月球基本地貌形态类型的划分装置在对月球基本地貌形态类型进行划分时,仅以上述各功能模块的划分进行举例说明,实际应用中,可以根据需要而将上述功能分配由不同的功能模块完成,即将设备的内部结构划分成不同的功能模块,以完成以上描述的全部或者部分功能。另外,上述实施例提供的月球基本地貌形态类型的划分装置与月球基本地貌形态类型的划分方法实施例属于同一构思,其具体实现过程详见方法实施例,此处不再一一赘述。
[0065]
由技术常识可知,本发明可以通过其它的不脱离其精神实质或必要特征的实施方案来实现。因此,上述公开的实施方案,就各方面而言,都只是举例说明,并不是仅有的。所有在本发明范围内或在等同于本发明的范围内的改变均被本发明包含。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1