异形混凝土结构模板生成方法及系统与流程
1.本发明涉及一种异形混凝土结构模板生成方法及系统。
背景技术:
2.随着异形建筑结构逐渐不断应用在各领域。如何保障异形混凝土结构在关键部位处的模板施工的可行性、安全和质量至关重要。
3.建筑施工行业内的模板模数的规格统一,相比较于传统规则建筑的模板按部就班的施工,薄壳结构在关键部位模板施工,尤其要求大体量的建筑结构在不同部位具备不同的弧度,但是受现场施工人员专业素质参差不齐、现场天气温湿度,模板下料切割不准等影响,常出现达不到特定结构弧度要求、模板缝杂乱无章、振捣不均匀等现象,严重影响施工质量和成本。
技术实现要素:
4.本发明的目的在于提供一种异形混凝土结构模板生成方法及系统。
5.为解决上述问题,本发明提供一种异形混凝土结构模板生成方法,包括:
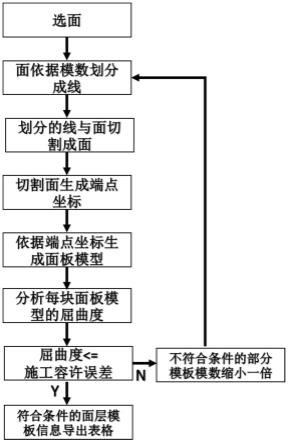
6.步骤s1,选择异形混凝土结构的下表面面层;
7.步骤s2,基于标准模板的模数,对选择的异形混凝土结构的下表面面层进行划分,以得到划分面层;
8.步骤s3,从划分面层中提取每个面层的四个坐标点;
9.步骤s4,依据每个面层的四个坐标点及异形混凝土结构的薄壳形体生成施工模板模型;
10.步骤s5,依据所述施工模板模型中每个面层模板的四个坐标点,计算每个面层模板的屈曲度;
11.步骤s6,判断所述施工模板模型中每个面层模板的屈曲度,是否超出预设施工容许误差,超出即为屈曲度不满足要求;
12.步骤s7,若超出预设施工容许误差,则重新转到步骤s2开始执行;
13.步骤s8,若未超出预设施工容许误差,则将自适应模板模型中每个面层模板的四个端点坐标导出至对应的面层模板模型,从每个面层模板模型中提取面层模板的id、面层模板每边的长度、每块面层模板的四个端点坐标,以便于进行后续的异形混凝土结构的设计与下料施工准备。
14.进一步的,在上述方法中,步骤s1,选择异形混凝土结构的下表面面层,包括:
15.利用dynamo中的select face节点异形混凝土结构的下表面面层;
16.进一步的,在上述方法中,步骤s2,基于标准模板的模数,对选择的异形混凝土结构的下表面面层进行划分,以得到划分面层,包括:
17.基于标准模板的模数,并按照横向与竖向进行划分成线,以得到划分好的横向和竖向的线;使用dynamo中的intersection.geometrysplit节点按照划分好的横向和竖向线
进行切割,以得到划分面层。
18.进一步的,在上述方法中,步骤s3,从划分面层中提取每个面层的四个坐标点,包括:
19.利用dynamo中的wh_surface.deconstructsurface节点,从划分面层中提取每个面层的四个坐标点。
20.进一步的,在上述方法中,步骤s4,依据每个面层的四个坐标点及异形混凝土结构的薄壳形体生成施工模板模型,包括:
21.依据每个面层的四个坐标点及异形混凝土结构的薄壳形体,使用自适应节点adaptivecomponent.bypoints,在dynamo中生成bim施工模板模型。
22.进一步的,在上述方法中,所述屈曲度为每个面层模板的四个坐标点中的某一坐标点至另三个坐标点所形成的平面的垂直距离。
23.进一步的,在上述方法中,步骤s5,依据所述施工模板模型中每个面层模板的四个坐标点,计算每个面层模板的屈曲度,包括:
24.将每个面层模板的四个点分为两组,第一组为取每个面层模板的四个坐标点中的三个坐标点,利用plane.bythreepoints将三个坐标点成投影面;第二组为取每个面层模板的四个坐标点中剩下的一个坐标点,利用surface.projectinputonto投影功能,将第二组的点投影至所述投影面得到投影点,分别计算每个面层模板的投影点和该面层模板的第二组中的坐标点的长度即屈曲度。
25.进一步的,在上述方法中,所述预设施工容许误差为-5mm~10mm。
26.进一步的,在上述方法中,步骤s8,若未超出预设施工容许误差,则将自适应模板模型中每个面层模板的四个端点坐标导出至对应的面层模板模型,从每个面层模板模型中提取面层模板的id、面层模板每边的长度、每块面层模板的四个端点坐标,包括:
27.若未超出预设施工容许误差,则将自适应模板模型中每个面层模板的四个端点坐标导出至revit的对应的面层模板模型中,同时,利用excel.writetofile节点将面层模板模型中面层模板的id、面层模板每边的长度、每块面层模板的四个端点坐标输出至excel。
28.根据本发明的另一方面,还提供一种异形混凝土结构模板生成系统,包括:
29.第一模块,用于选择异形混凝土结构的下表面面层;
30.第二模块,用于基于标准模板的模数,对选择的异形混凝土结构的下表面面层进行划分,以得到划分面层;
31.第三模块,用于从划分面层中提取每个面层的四个坐标点;
32.第四模块,用于依据每个面层的四个坐标点及异形混凝土结构的薄壳形体生成施工模板模型;
33.第五模块,用于依据所述施工模板模型中每个面层模板的四个坐标点,计算每个面层模板的屈曲度;
34.第六模块,用于判断所述施工模板模型中每个面层模板的屈曲度,是否超出预设施工容许误差,超出即为屈曲度不满足要求;
35.第七模块,用于若超出预设施工容许误差,则重新转到第二模块开始执行;
36.第八模块,用于若未超出预设施工容许误差,则将自适应模板模型中每个面层模板的四个端点坐标导出至对应的面层模板模型,从每个面层模板模型中提取面层模板的
id、面层模板每边的长度、每块面层模板的四个端点坐标,以便于进行后续的异形混凝土结构的设计与下料施工准备。
37.与现有技术相比,本发明的目的是在面对异形混凝土结构的模板施工前,提供一种能够分析不同弧度要求模板施工的方法,智能分析不同区域模板下料,研判模板施工可行性,保证施工质量。本发明可以实现模型正向数字化,通过在模型表面上的切分,生成施工模板模型,利用施工模板模型中每个面层在施工容许误差(-5mm~10mm)下对面层模板的模型进行拟合,将每块拟合的模板id、模板每边边长、端点坐标导出至excel表当中,尤其对于弯曲度较大、施工难度较大、施工精度较高的区域,在后续模板下料的统计过程当中,发挥的作用非常明显。
38.本发明适应性广,当面层模板的模型发生任何变动,excel中的数据会立刻发生改变,excel中的数据与模型产生联动,生成符合施工容许误差(-5mm~10mm)的模板,相应的面层模板的模型包含相关数据信息,并将相应的数据导出至excel表当中,同时本发明可适用于任何薄壳及幕墙结构分析。
39.本发明便于施工,可以加快模板的加工深化效率,模板的无损周转,减少模板损耗,减少模板施工拼缝,方便施工人员下料,便于现场施工拼装,提高曲面结构的现场混凝土施工质量。
附图说明
40.图1为本发明一实施例的异形混凝土结构模板生成方法的逻辑流程图;
41.图2为本发明一实施例的异形混凝土结构模板生成方法的模型划分切割图;
42.图3为本发明一实施例的异形混凝土结构模板生成方法的面层模板坐标点图;
43.图4为本发明一实施例的异形混凝土结构模板生成方法的面层模板屈曲度色彩展示图;
44.图5为本发明一实施例的异形混凝土结构模板生成方法的面层模板信息展示图;
45.图6为本发明一实施例的异形混凝土结构模板生成方法的面层模板信息导出的excel下料统计展示图。
具体实施方式
46.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
47.如图1~5所示,本发明提供一种异形混凝土结构模板生成方法,包括:
48.步骤s1,选择异形混凝土结构的下表面面层;
49.在此,可以利用dynamo中的select face节点异形混凝土结构的下表面面层;
50.步骤s2,基于标准模板的模数,对选择的异形混凝土结构的下表面面层进行划分,以得到划分面层;
51.在此,如图2所示,基于标准模板的模数,并按照横向与竖向进行划分成线,以得到划分好的横向和竖向的线;使用dynamo中的intersection.geometrysplit节点按照划分好的横向和竖向线进行切割,以得到划分面层;
52.步骤s3,从划分面层中提取每个面层的四个坐标点;
53.在此,如图3所示,利用dynamo中的wh_surface.deconstructsurface节点,从划分面层中提取每个面层的四个坐标点;
54.可以利用wh_surface.deconstructsurface节点,将划分面层中以空间坐标点的形式表现;
55.步骤s4,依据每个面层的四个坐标点及异形混凝土结构的薄壳形体生成施工模板模型;
56.在此,依据每个面层的四个坐标点及异形混凝土结构的薄壳形体,使用自适应节点adaptivecomponent.bypoints,在dynamo中生成bim施工模板模型;
57.步骤s5,依据所述施工模板模型中每个面层模板的四个坐标点,计算每个面层模板的屈曲度,其中,所述屈曲度为每个面层模板的四个坐标点中的某一坐标点至另三个坐标点所形成的平面的垂直距离;
58.在此,依据每个面层模板的坐标计算面层模板的屈曲度:将每个面层模板的四个点分为两组,第一组为取每个面层模板的四个坐标点中的三个坐标点,利用plane.bythreepoints将三个坐标点成投影面;第二组为取每个面层模板的四个坐标点中剩下的一个坐标点,利用surface.projectinputonto投影功能,将第二组的点投影至所述投影面得到投影点,分别计算每个面层模板的投影点和该面层模板的第二组中的坐标点的长度即屈曲度,屈曲度数值越大,代表该面层区域弯曲程度越大,模板越需细化分割;
59.步骤s6,判断所述施工模板模型中每个面层模板的屈曲度,是否超出预设施工容许误差,超出即为屈曲度不满足要求;
60.在此,所述预设施工容许误差为-5mm~10mm;
61.如图4和5所示,本发明可以实现数据可视化:利用屈曲度的数值大小代表模板施工容许误差,可以用不同颜色分别代表不同的屈曲度区间在bim模型当中展示,将数字大小用色彩表示,可以更直观的表达施工重难点区域;
62.步骤s7,若超出预设施工容许误差,则重新转到步骤s2开始执行;
63.在此,本发明可以对自适应模板模型中不满足要求的屈曲度的面层的进行二次切分,然后对二次切分的面层重复屈曲度计算、判断和切分的过程,直至自适应模板模型中所有的面层的屈曲度未超出预设施工容许误差;
64.本发明可以依据屈曲度进行过滤筛选:屈曲度等效为施工容许误差(-5mm~10mm),屈曲度越大即施工容许误差(-5mm~10mm)越大。依据屈曲度数值大小进行区间过滤筛选,利用element.overridecolorinview和ui.colorpicker节点用不同颜色分别代表不同的屈曲度区间,以此区分施工可容许误差的面层模板区域;依据屈曲度进行过滤筛选超出施工可容许误差的面层模板id,按照标准模板的模数缩小一倍重新生成面层模板,重新生成屈曲度筛选、以此往复直至屈曲度符合施工可容许误差;
65.步骤s8,若未超出预设施工容许误差,则将自适应模板模型中每个面层模板的四个端点坐标导出至对应的面层模板模型,从每个面层模板模型中提取面层模板的id、面层模板每边的长度、每块面层模板的四个端点坐标,以便于进行后续的异形混凝土结构的设计与下料施工准备。
66.在此,如图6所示,若未超出预设施工容许误差,则将自适应模板模型中每个面层模板的四个端点坐标导出至revit的对应的面层模板模型中,同时,利用
excel.writetofile节点将面层模板模型中面层模板的id、面层模板每边的长度、每块面层模板的四个端点坐标输出至excel,便于下料统计。
67.本发明的目的是在面对异形混凝土结构的模板施工前,提供一种能够分析不同弧度要求模板施工的方法,智能分析不同区域模板下料,研判模板施工可行性,保证施工质量。本发明可以实现模型正向数字化,通过在模型表面上的切分,生成施工模板模型,利用施工模板模型中每个面层在施工容许误差(-5mm~10mm)下对面层模板的模型进行拟合,将每块拟合的模板id、模板每边边长、端点坐标导出至excel表当中,尤其对于弯曲度较大、施工难度较大、施工精度较高的区域,在后续模板下料的统计过程当中,发挥的作用非常明显。
68.本发明适应性广,当面层模板的模型发生任何变动,excel中的数据会立刻发生改变,excel中的数据与模型产生联动,生成符合施工容许误差(-5mm~10mm)的模板,相应的面层模板的模型包含相关数据信息,并将相应的数据导出至excel表当中,同时本发明可适用于任何薄壳及幕墙结构分析。
69.本发明便于施工,可以加快模板的加工深化效率,模板的无损周转,减少模板损耗,减少模板施工拼缝,方便施工人员下料,便于现场施工拼装,提高曲面结构的现场混凝土施工质量。
70.根据本发明的另一方面,还提供一种异形混凝土结构模板生成系统,包括:
71.第一模块,用于选择异形混凝土结构的下表面面层;
72.第二模块,用于基于标准模板的模数,对选择的异形混凝土结构的下表面面层进行划分,以得到划分面层;
73.第三模块,用于从划分面层中提取每个面层的四个坐标点;
74.第四模块,用于依据每个面层的四个坐标点及异形混凝土结构的薄壳形体生成施工模板模型;
75.第五模块,用于依据所述施工模板模型中每个面层模板的四个坐标点,计算每个面层模板的屈曲度;
76.第六模块,用于判断所述施工模板模型中每个面层模板的屈曲度,是否超出预设施工容许误差,超出即为屈曲度不满足要求;
77.第七模块,用于若超出预设施工容许误差,则重新转到第二模块开始执行;
78.第八模块,用于若未超出预设施工容许误差,则将自适应模板模型中每个面层模板的四个端点坐标导出至对应的面层模板模型,从每个面层模板模型中提取面层模板的id、面层模板每边的长度、每块面层模板的四个端点坐标,以便于进行后续的异形混凝土结构的设计与下料施工准备。
79.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
80.专业人员还可以进一步意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应
认为超出本发明的范围。显然,本领域的技术人员可以对发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包括这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1