一种海流轨迹预测方法与流程
1.本发明涉及海流轨迹预测技术领域,特别涉及一种海流轨迹预测方法。
背景技术:
2.全球海流的多样性与差异性特点导致不同海域的海流流速和流向存在着大量的冲突与不一致,其长期和短期时空变化和分布也不尽相同,准确预测不同海域的海流流速和流向的未来状态面临着诸多挑战。由于不同海域的海流流速和流向变化随机性非常强,非线性和非平稳性特征十分明显,目前还没有一种明确可行且精度较高的方法对不同海域的海流流速和流向进行有效的预测。
3.现有的对不同海域的海流流速和流向的预测方法分为三种:(1)统计预报法:应用概率论、数理统计的方法预报未来不同海域的海流流速和流向变化;(2)数值模式法:依据海水运动方程和热力方程等一系列偏微分方程描述海水物理状态,通过给定初始条件、边界条件和外界强迫因子对方程进行求解,从而得出未来不同海域的海流流速和流向变化;(3)经验预报法:根据不同海域的海流流速和流向自身变动的持续性、周期性、相似性以及与其他要素的相关性,来做出定性或定量预报。
4.因此,在现有的对不同海域的海流流速和流向的预测方法的基础上,如何有效提高不同海域的海流流速和流向的预测精度和效率,成为本领域技术人员亟需解决的问题。
技术实现要素:
5.鉴于上述问题,本发明提出了一种至少解决上述部分技术问题的海流轨迹预测方法,该方法可得出不同海域的海流流速和流向的预测值,可有效提高不同海域的海流流速和流向的预测精度和效率。
6.本发明实施例提供一种海流轨迹预测方法,包括如下步骤:
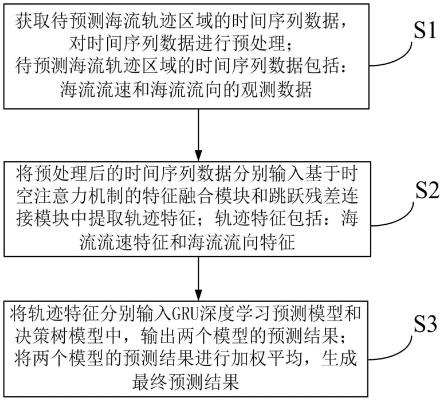
7.s1、获取待预测海流轨迹区域的时间序列数据,对所述时间序列数据进行预处理;所述预处理包括对所述时间序列数据进行补缺失、去异常、标准化和特征选择;所述待预测海流轨迹区域的时间序列数据包括:海流流速和海流流向的观测数据;
8.s2、将预处理后的所述时间序列数据分别输入基于时空注意力机制的特征融合模块和跳跃残差连接模块中提取轨迹特征;所述轨迹特征包括:海流流速特征和海流流向特征;
9.s3、将所述轨迹特征分别输入gru深度学习预测模型和决策树模型中,输出两个模型的预测结果;将所述两个模型的预测结果进行加权平均,生成最终预测结果。
10.进一步地,所述步骤s2还包括:
11.通过所述基于时空注意力机制的特征融合模块的主干网络提取轨迹特征;
12.将所述轨迹特征通过所述基于时空注意力机制的特征融合模块融合生成特征金字塔网络;
13.将所述特征金字塔网络作为所述gru深度学习预测模型和决策树模型的主干网
络。
14.进一步地,还包括:
15.s4、分别通过均方根误差和平均绝对误差评估所述最终预测结果的预测精度。
16.进一步地,分别通过如下公式计算所述均方根误差和平均绝对误差:
[0017][0018]
上式中,l表示时间序列数据的数量;i表示当前序列点;y
iobs
和y
ipre
分别表示观测真值和预测值。
[0019]
进一步地,所述gru深度学习预测模型有更新门和重置门两个门,以及一个tanh层。
[0020]
进一步地,所述决策树模型从根节点开始,用训练集递归建立决策树,包括:
[0021]
s31、构建决策子树;
[0022]
s32、基于各个预设递归条件分别对各个节点进行递归;计算当前节点各个特征的特征值对训练集的基尼系数;从所述基尼系数中选择数值最小的值对应的特征和特征值,作为最优特征和最优特征值;
[0023]
s33、根据所述最优特征和最优特征值,将所述训练集划分成第一训练分集和第二训练分集;
[0024]
s34、建立所述当前节点的左右节点,将所述第一训练分集作为左节点的数据集;将所述第二训练分集作为右节点的数据集;
[0025]
s35、分别对所述左右节点执行步骤s32~步骤s34,直至递归完成,生成决策树。
[0026]
进一步地,所述预设递归条件包括:
[0027]
对于当前节点的训练集,如果样本个数小于第一预设阈值,则返回所述决策子树,对所述当前节点停止递归;
[0028]
计算当前节点的训练集的基尼系数,如果所述基尼系数小于第二预设阈值,则返回所述决策树子树,对所述当前节点停止递归。
[0029]
进一步地,采用最终叶子的均值或中位数来预测最终建立的决策树的输出结果。
[0030]
本发明实施例提供的上述技术方案的有益效果至少包括:
[0031]
本发明实施例提供的一种海流轨迹预测方法,包括:获取待预测海流轨迹区域的时间序列数据,对时间序列数据进行预处理;将预处理后的时间序列数据输入基于时空注意力机制的特征融合模块中提取轨迹特征;将轨迹特征分别输入gru深度学习预测模型和决策树模型中,输出两个模型的预测结果;将两个模型的预测结果进行加权平均,生成最终预测结果。该方法可分别对待预测海域的海流流速和流向进行预测,且模型的泛化能力强,具有可解释性,预报精度和效率高。
[0032]
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变
得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
[0033]
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
[0034]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
[0035]
图1为本发明实施例提供的海流轨迹预测方法流程图;
[0036]
图2为本发明实施例提供的gru深度学习预测模型网络结构;
[0037]
图3为本发明实施例提供的模型中数据流向图;
[0038]
图4为本发明实施例提供的方法步骤流程图。
具体实施方式
[0039]
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
[0040]
本发明实施例提供一种海流轨迹预测方法,参照图1所示,包括如下步骤:
[0041]
s1、获取待预测海流轨迹区域的时间序列数据,对时间序列数据进行预处理;预处理包括对时间序列数据进行补缺失、去异常、标准化和特征选择;待预测海流轨迹区域的时间序列数据包括:海流流速和海流流向的观测数据;
[0042]
s2、将预处理后的时间序列数据分别输入基于时空注意力机制的特征融合模块和跳跃残差连接模块中提取轨迹特征;轨迹特征包括:海流流速特征和海流流向特征;
[0043]
s3、将轨迹特征分别输入gru深度学习预测模型和决策树模型中,输出两个模型的预测结果;将两个模型的预测结果进行加权平均,生成最终预测结果。
[0044]
该海流轨迹预测方法,可分别对待预测海域的海流流速和海流流向进行预测,且模型的泛化能力强,具有可解释性,以及更好的预报能力和泛化能力;采用注意力机制能够有效降低特征融合造成的混叠效应,提高了对海流的检测精度,预测精度和预测效率高。
[0045]
下面具体对本实施例提供的海流轨迹预测方法进行详细阐述:
[0046]
本实施例采用2008年1月1日至2019年12月30日的数据集用于模型建立与训练评估;数据每间隔每6小时采集一次,共计32984组数据。经过数据质量控制,有效数据为24200组:其中60%用于训练,20%用于验证,20%用于测试。
[0047]
首先,对数据进行补缺失、去异常、标准化和特征选择等一系列预处理工作,为模型预测提供更加有效的特征信息。
[0048]
海流预测采用多种经典的深度学习方法分别对海流轨迹特征进行拟合,对经过合理定义的预测任务进行实验,获得了较好的预测效果。海流轨迹预测模型以基于时空注意力机制的特征融合模块提取轨迹特征(海流流速和流向特征),之后结合gru模型的深度学习网络结构对海流信息进行预测,对时间序列数据构建gru深度学习预测模型。gru作为循环神经网络(recurrentneural network,rnn)的变体模型,弥补了rnn的梯度消失和梯度爆
炸、长期记忆能力不足等问题,使得循环神经网络能够真正有效地利用长距离的时序信息。有效地避免了传统的rnn模型预测耗时过久,模型难以训练等问题。同时考虑到深度学习泛化能力不够且缺乏解释性,基于集合预报理论构建了决策树集合模型,该模型具有更好的预报能力和泛化能力。实验证明本实施例提出的海流轨迹预测模型能达到较高的预测准确率,对海上搜救、目标追踪等有重要意义。
[0049]
具体地,在提取轨迹特征的过程中,首先,引入一种基于时空注意力机制的特征融合模块(记为tsffbam,time space feature fusion methodbased on attentionmechanism),其不仅在时间上抑制无用信息,而且也在空间上抑制无用信息,用于降低特征融合过程中(提取轨迹特征)引入的混叠效应。其次,设计了一种跳跃残差连接模块用于降低特征融合过程中高层特征信息的丢失(记为srcm,skip residual connectional module),残差网络结构在特征提取过程中能够降低特征信息的丢失。最后,基于tsffbam能够提取不同深度特征的优势,用tsffbam主干网络提取特征,将提取的特征使用tsffbam融合生成特征金字塔网络,并用生成的特征金字塔网络作为gru和dt主干网络,来更为充分地提取海流特征,以便更为有效地进行海流预测。
[0050]
其次,对时间序列数据构建gru深度学习预测模型。gru作为循环神经网络(recurrentneuralnetwork,rnn)的变体模型,弥补了rnn的梯度消失和梯度爆炸、长期记忆能力不足等问题,使得循环神经网络能够真正有效地利用长距离的时序信息。gru深度神经网络使用特殊的gru结构替换了一般的递归神经网络的隐藏层神经元。
[0051]
gru模型对传统lstm模型进行了优化改进,gru只有两个门(update和reset),而传统的lstm有三个门(forget,input,output),gru直接将hidden state传给下一个单元,效率更高。参照图2所示,图2整体为一个神经细胞单元,单元的输入x
t
经过计算得到当前状态信息。gru模型将lstm网络模型的输入门和遗忘门通过更新门耦合,并且复位门直接应用于相对于现在的隐藏状态h
t
的之前的隐藏状态h
t-1
。因而lstm复位门的任务在gru中被分解为重置门(r)和更新门(z)来完成。r确定是否要将当前状态信息与先前的信息结合起来,而z定义须要保留多少内存(即指信息)。sigmoid函数将0~1的数字压扁(把数值范围缩放到0~1),描述应该传递多少信息。tanh函数用于将h
t
的值置于-1和1之间,gru单元由下式计算得出:
[0052][0053]
上式中,x
t
为当前输入;w和u为神经网络权重矩阵;h
t
为当前隐藏状态;h
t-1
为之前的隐藏状态;r
t
为确定是否要将当前状态与先前的信息结合起来;z
t
定义需要保留多少信息;σ为sigmoid函数;1为让所有的信息均通过细胞状态;0为没有信息被允许通过细胞单元状态。
[0054]
gru中有更新门和重置门两个门,一个tanh层(tanh决定把什么信息向下一单元传递);而lstm有遗忘门、输入门和输出门三个门,两个tanh层。在结构上,gru比lstm简单,gru参数比lstm少,计算复杂度低,收敛快。
[0055]
最后,构建决策树模型。决策树算法输入训练集d、基尼系数的阈值和样本个数阈值;输出决策树t。其中,“训练集d”与下面的“数据集d”、“样本集d”是指代同一个数据集。
[0056]
具体地,算法从根节点开始,用训练集递归建立决策树。包括:
[0057]
1)对于当前节点的数据集为d,如果样本个数小于阈值或者没有特征,则返回决策子树,当前节点停止递归。决策子树指一个树形递归结构,有多个枝叶结构子树构成。
[0058]
2)计算样本集d的基尼系数,如果基尼系数小于阈值,则返回决策树子树,当前节点停止递归。
[0059]
3)计算当前节点现有的各个特征的各个特征值对数据集d的基尼系数。
[0060]
4)在计算出来的各个特征的各个特征值对数据集d的基尼系数中,选择基尼系数最小的特征a和对应的特征值a。根据这个最优特征和最优特征值,把数据集划分成两部分d1和d2,同时建立当前节点的左右节点,左节点的数据集d为d1,右节点的数据集d为d2。
[0061]
5)对左右的子节点递归的调用1-4步,生成决策树。
[0062]
即,分别对左节点的子节点递归调用1-4步,以及对右节点的子节点递归调用1-4步。此时,左节点的子节点的数据集即为d1;右节点的子节点的数据集即为d2。
[0063]
对于决策树建立后做预测的方式,采用最终叶子(最终生成的决策树的预测结果即为最终叶子)的均值或者中位数来预测输出结果。
[0064]
对于本决策树模型,使用了常见的和方差的度量方式,对于任意划分特征a,对应的任意划分点s两边划分成的数据集d1和d2,求出使d1和d2各自集合的均方差最小(指基尼系数最小),以及d1和d2的均方差之和最小所对应的特征和特征值划分点。表达式为:
[0065][0066]
上式中,a为划分特征(如:时间信息);s为划分点,划分成的数据集d1和d2;xi属于数据集d1和d2中的x轴变量;yi和y
t
属于的数据集d1和d2中的y轴变量;c1和c2为数据集d1和d2均值;min为求取均方差最小。
[0067]
参照图3所示,为本发明实施例提供的模型中数据流向图。以基于时空注意力机制的特征融合模块提取轨迹特征,之后结合gru和决策树dt模型的深度学习网络结构对海流信息进行预测,有效地避免了传统的rnn模型预测耗时过久,模型难以训练等问题。
[0068]
参照图4所示,为本发明实施例提供的方法步骤流程图。首先,构建训练和验证数据集,然后分别训练gru和决策树模型,最后对gru模型输出和决策树dt模型输出的流速和流向数据,进行加权平均得到最优预测结果。
[0069]
深度学习模型构建步骤如下:
[0070]
首先,构建训练数据集。将海流流速和流向数据进行拆分:其中60%用于训练,20%用于验证,20%用于测试。
[0071]
其次,训练gru和决策树模型(两个模型分别训练,最后结果加权平均),调试模型参数。gru模型选择双曲正切函数作为激活函数,设置两个隐藏层和一个输出层,每层神经元个数为256个。训练中输入和输出数据比为100:10,即:用10天数据预测1天数据的方式进
行训练,可设置成输入10天每间隔1小时采集的数据,输出第11天每间隔1小时预测的数据。本模型采用三层gru和决策树算法构建,每层采用256个神经元,以dropout为0.2,学习率为0.001~0.1,综合样本数据(指海流观测及反演数据)和洋流季节特性作为模型超参数输入。训练损失函数采用loss函数,指预测值与真值的差值;随着模型参数的优化调整,最终达到一个稳定的误差范围。
[0072]
最后,通过gru和决策树深度学习预测模型,得到了时间序列数据的分别的预测结果,决策树算法与gru模型以加权平均方式进行有机结合,将各个预测结果进行合成得到最终预测结果y(t),最终实现对流速流向的有效预测。
[0073]
在本实施例中,用均方根误差root ofmean squared error(rmse)和平均绝对误差meanabsolute error(mae)来评估海流流速和流向的预测结果,计算公式分别如下:
[0074][0075]
上式中,l为时间序列数据的数量;i为当前序列点;y
iobs
和y
ipre
分别表示观测真值和预测值。
[0076]
rmse表示衡量观测值与真实值之间的偏差;mae是绝对误差的平均值;可以更好地反映预测值误差的实际情况。rmse和mae越小,表示预测效果越好。
[0077]
下表为分别预测每个海流轨迹的海流流速和流向信息的预测评估指标。
[0078]
表1预测评估指标
[0079]
预测结果rmsemae海流10.410.38海流20.440.39海流30.460.42海流40.480.43海流50.490.45海流60.550.46海流70.570.47海流80.650.48海流90.660.51海流100.690.55平均0.540.45
[0080]
可以看出,该预测模型平均绝对误差为0.45,模型整体状态稳定,无剧烈变化。
[0081]
进一步地,使用本方法对海流流速和流向做预报时,仅需将过去10天数据加载进已经训练好的模型中,可以快速得出预报结果,避免了传统数值预报的长时间计算。
[0082]
综上所述,在本实施例提供的海流流速和流向预测方法中,通过获取海流流速和
流向观测数据,进而进行质控,最终通过建立gru和决策树深度学习模型得出海流流速和流向的预测值,提高了预报效率和预报精度。
[0083]
本实施例,实现了针对不同海域的海流流速和流向数据的高精度预报,预报数据时间间隔1小时,预报平均绝对误差为0.45
°
,达到高精度水平。且仅需使用不同海域的海流流速和流向的长时间序列数据,不需要使用其它数据。占用资源少,计算速度快。可用于但不限于海流流速和流向预报,也可用于海流流速和流向以外的目标追踪预报。
[0084]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1