一种基于人体特征的快速人体骨骼有限元模型建模方法
1.本发明涉及汽车被动安全领域,具体为一种基于人体特征的快速人体骨骼有限元模型建模方法。
技术背景
2.人体有限元模型是汽车碰撞过程中乘员伤害评估的重要分析工具,对于汽车被动安全的提升有着至关重要的影响。不同特征人体如老人、肥胖者、儿童以及矮小女性等的骨骼特征具有较大差异,因此对不同体征人体进行有限元分析就需要建立不同的特征人体有限元模型。目前已有较为精细的有限元人体模型,如thums(total human model for safety)人体有限元模型,但此类模型只针对5百分位、50百分位、95百分位三种体征的人体,无法反应其他体征类型的人体损伤情况。现有针对人体特征进行有限元建模的方法需要手动提取基准有限元模型的标记点,以及目标几何的对应标记点,此过程十分费时费力,并且由于是手动提取,因此不可避免的存在大量误差,导致生成的有限元模型相较于目标几何特征有较大偏差,适用性较差。
技术实现要素:
3.鉴于此,本发明提出一种可以根据不同人体的体征特点,对现有成熟的thums人体有限元模型进行变换,从而生成具有不同体征特点的人体骨骼有限模型的方法,该方法基于点云非刚性配准的思想,不仅避免了现有方法中繁琐的手动标记过程,而且生成的模型精度大幅度提升。
4.本发明的技术方案是提供了一种基于人体特征的快速人体有限元模型建模方法,其特征在于:
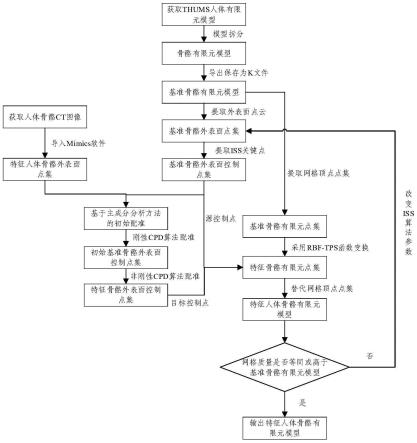
5.步骤1、获取人体骨骼ct图像,此过程为提取目标人体骨骼的几何形状外轮廓;
6.步骤2、将人体骨骼ct图像导入mimics软件中获取相应的特征人体骨骼外表面点云数据,标记为特征人体骨骼外表面点集pc;
7.步骤3、获取thums(total human model for safety)人体有限元模型,并对模型进行拆分,分别提取人体各骨骼有限元模型,标记为基准骨骼有限元模型fems;
8.步骤4、在hypermesh软件中提取各骨骼有限元模型的外表面点云,标记为基准骨骼外表面点集ps;
9.步骤5、采用iss(intrinsic shape signatures,内部形态描述子)算法,提取基准骨骼外表面点集ps中的关键点,通过关键点描述目标的几何特征,将提取出来的点标记为基准骨骼外表面控制点集p
s_c
;
10.步骤6、采用基于主成分分析方法的初始配准方法,将特征人体骨骼外表面点集p_c向基准骨骼外表面点集p_s进行粗配准,将特征人体骨骼外表面点集p_c与基准骨骼外表面点集p_s的主轴初步对齐;
11.步骤7、采用cpd(coherent point drift)算法将基准骨骼外表面控制点集p
s_c
向
特征人体骨骼外表面点集pc进行配准,将变换后的基准骨骼外表面控制点集p
s_c
标记为初始基准骨骼外表面控制点集p
s_c_i
;
12.步骤8、采用cpd(coherent point drift)算法,将初始特征骨骼外表面控制点集p
s_c_i
向特征人体骨骼外表面点集pc进行配准,将变换后的初始特征骨骼外表面控制点集p
s_c_i
为特征骨骼外表面控制点集p
c_c
;
13.步骤9、提取s3步骤中保存的基准骨骼有限元模型k文件中的网格顶点点集,标记为基准骨骼有限元点集fem
s_p
;
14.步骤10、采用rbf(radial basis function)对基准骨骼有限元点集fem
s_p
进行变换,控制点集为基准骨骼外表面控制点集p
s_c
,目标点集为特征骨骼外表面控制点集p
c_c
,核函数采用tps(thin-plate splines)函数,变换后的基准骨骼有限元点集标记为特征骨骼有限元点集fem
c_p
;
15.步骤11、将特征骨骼有限元点集fem
c_p
写入基准骨骼有限元模型k文件中,替代其中的网格顶点点集,生成特征人体骨骼有限元模型femc;
16.步骤12、对网格质量通过雅克比、扁平比、翘曲度以及倾斜度进行判断,若s11步骤中生成的特征人体骨骼有限元模型femc网格质量低于基准骨骼有限元模型fems,则重复步骤3,改变iss算法参数,重复步骤4-12;
17.步骤13、若生成的特征人体骨骼有限元模型femc网格质量等同或者高于基准骨骼有限元模型fems,则输出特征人体骨骼有限元模型femc。
18.进一步地,步骤3中,骨骼包括颅骨、胸腔骨骼、骨盆、股骨、胫骨、颈椎、腰椎、肱骨、桡骨、尺骨、肩胛骨和锁骨,有限元模型分别导出并保存为k文件格式,有限元模型包括网格顶点、网格、材料属性和单元属性。
19.进一步地,步骤5中,设基准骨骼外表面控制点集p
s_c
中包含n个点(xi,yi,zi),i=1,2,...,n.iss关键点提取流程如下:
20.步骤5.1、对基准骨骼外表面控制点集p
s_c
每个点p
s_c_i
建立一个局部坐标系,并对每个点设定近邻搜索点数k;
21.步骤5.2、确定基准骨骼外表面控制点集p
s_c
中以每个点p
s_c_i
为中心,计算所有近邻搜索点的权值w
ij
,表达式为:
22.w
ij
=1/||p
i-pj||,|p
i-pj|<k
23.步骤5.3、计算每个点p
s_c_i
的协方差矩阵,表达式为:
[0024][0025]
步骤5.4、计算每个点的协方差矩阵的特征值并进行大小排列;
[0026]
步骤5.5、设置阈值ε1,ε2,若满足和则为关键点;
[0027]
步骤5.6、重复上述步骤,遍历基准骨骼外表面控制点集中所有点。
[0028]
进一步地,步骤7中,对于采用cpd算法将基准骨骼外表面控制点集p
s_c
向特征人体骨骼外表面点集pc进行配准,其变换关系如下:
[0029]
pc=t(p
s_c
,θ)
[0030]
其中t为转换关系,θ为p
s_c
的变换矩阵。
[0031]
在此步骤中,θ为刚性转化矩阵,包含旋转矩阵r,平移矩阵t。
[0032]
进一步地,步骤8中,对于采用cpd算法,将基准骨骼外表面控制点集p
s_c_i
向特征人体骨骼外表面点集pc进行配准,其变换关系如下:
[0033]
pc=t(p
s_c_i
,θ)
[0034]
其中t为转换关系,θ为p
s_c_i
的变换矩阵;
[0035]
在此步骤中,θ为刚性转化矩阵,包含旋转矩阵r,平移矩阵t,缩放比例s。
[0036]
本发明的有益效果在于:
[0037]
(1)本发明对现有网格变形技术进行了改进,传统网格变形技术需要手动在目标几何与基准模型上相同位置放置顺序相同的特征标记点,本发明提出的基于点云配准的方法直接在目标几何与基准模型上自动的生成特征标记点,省去了大量的人工标记时间,同时也避免了人工标记的误差。
[0038]
(2)本发明提出的建模方法具有自适应调整的特点,可以根据模型变形效果对基准模型自动生成的标记点数量进行自适应调整,若需要变形后的模型与目标几何契合度高,则可以调整iss算法参数,生成数量较多的特征点,若需要变形后的模型保持原有模型网格质量特点,则可以生成数量较少的特征点。
[0039]
(3)本发明提出的人体有限元模型建模方法具有快速、准确的特点,能够根据不同的人体几何特点进行快速建模,在医学以及交通事故中的人体损伤研究方面具有广阔的应用前景。
附图说明
[0040]
图1基于人体特征的快速人体有限元模型建模方法示意图。
具体实施方式
[0041]
为使本技术的上述目的,特征和优点能够更加明显易懂,下面结合附图对本技术的具体实施方式做详细的说明。
[0042]
如图1所示,该实施例提供了一种基于人体特征的快速人体有限元模型建模方法。
[0043]
步骤1、获取人体骨骼ct图像,此过程为提取目标人体骨骼的几何形状外轮廓;
[0044]
步骤2、将人体骨骼ct图像导入mimics软件中获取相应的特征人体骨骼外表面点云数据,标记为特征人体骨骼外表面点集pc;
[0045]
该步骤中,将人体骨骼ct图像导入mimics软件中,经过阈值提取、孔洞填充、平滑等操作,获取与ct图像相对应的几何形状,将该几何以点云的形式输出,获取相应的特征人体骨骼外表面点云数据,标记为特征人体骨骼外表面点集pc;
[0046]
步骤3、获取thums(total human model for safety)人体有限元模型,并对模型进行拆分,分别提取人体各骨骼有限元模型,标记为基准骨骼有限元模型fems;
[0047]
该步骤中,对模型进行拆分,分别提取人体各骨骼,骨骼包括颅骨、胸腔骨骼、骨盆、股骨、胫骨、颈椎、腰椎、肱骨、桡骨、尺骨、肩胛骨、锁骨等,有限元模型,分别导出并保存为k文件格式,模型包括网格顶点、网格、材料属性、单元属性,标记为基准骨骼有限元模型fems;
[0048]
步骤4、在hypermesh软件中提取各骨骼有限元模型的外表面点云,标记为基准骨
骼外表面点集ps;
[0049]
步骤5、采用iss(intrinsic shape signatures,内部形态描述子)算法(近邻搜索点数设置为10,阈值ε1,ε2均为0.5)提取基准骨骼外表面点集ps中的关键点,iss算法能够提取点云中的关键点,这些关键点能够较好的描述目标的几何特征,将提取出来的iss关键点标记为基准骨骼外表面控制点集p
s_c
;
[0050]
该步骤中,设基准骨骼外表面控制点集p
s_c
中包含n个点(xi,yi,zi),i=1,2,...,n.iss关键点提取流程如下:
[0051]
步骤5.1、对基准骨骼外表面控制点集p
s_c
每个点p
s_c_i
建立一个局部坐标系,并对每个点设定近邻搜索点数k;
[0052]
步骤5.2、确定基准骨骼外表面控制点集p
s_c
中以每个点p
s_c_i
为中心,计算所有近邻搜索点的权值w
ij
,表达式为:
[0053]wij
=1/||p
i-pj||,|p
i-pj|<k
[0054]
步骤5.3、计算每个点p
s_c_i
的协方差矩阵,表达式为:
[0055][0056]
步骤5.4、计算每个点的协方差矩阵的特征值并进行大小排列;
[0057]
步骤5.5、设置阈值ε1,ε2,若满足和则为关键点;
[0058]
步骤5.6、重复上述步骤,遍历基准骨骼外表面控制点集中所有点。
[0059]
步骤6、采用基于主成分分析方法的初始配准方法,将特征人体骨骼外表面点集p_c向基准骨骼外表面点集p_s进行粗配准,将特征人体骨骼外表面点集p_c与基准骨骼外表面点集p_s的主轴初步对齐;
[0060]
该步骤中,ct图像中提取的目标人体特征几何与作为基准的人体有限元模型处于不同的坐标系,因此两者空间位置差别较大,需要将两者进行配准,使其处于相同的坐标系下,采用基于主成分分析方法的初始配准方法,将特征人体骨骼外表面点集pc向基准骨骼外表面点集ps进行粗配准,将特征人体骨骼外表面点集pc与基准骨骼外表面点集ps的主轴初步对齐;
[0061]
步骤7、采用cpd(coherent point drift,相干点漂移)算法(变换矩阵类型为刚性)将基准骨骼外表面控制点集p
s_c
向特征人体骨骼外表面点集pc进行配准,将变换后的基准骨骼外表面控制点集p
s_c
标记为初始基准骨骼外表面控制点集p
s_c_i
;
[0062]
该步骤中,粗配准后的两个点集空间位置初步对齐,但两者形状存在较大差异,采用cpd(coherent point drift,相干点漂移)算法(变换矩阵类型为刚性)将基准骨骼外表面控制点集p
s_c
向特征人体骨骼外表面点集pc进行配准,采用刚性的变换矩阵将两者形状大致对齐,将变换后的基准骨骼外表面控制点集p
s_c
标记为初始基准骨骼外表面控制点集p
s_c_i
;
[0063]
具体的,对于采用cpd算法(变换矩阵类型为刚性)将基准骨骼外表面控制点集p
s_c
向特征人体骨骼外表面点集pc进行配准,其变换关系如下:
[0064]
pc=t(p
s_c
,θ)
[0065]
其中t为转换关系,θ为p
s_c
的变换矩阵。
[0066]
在此步骤中,θ为刚性转化矩阵,包含旋转矩阵r,平移矩阵t。
[0067]
步骤8、采用cpd(coherent point drift,相干点漂移)算法(变换矩阵类型为非刚性)将初始特征骨骼外表面控制点集p
s_c_i
向特征人体骨骼外表面点集pc进行配准,将变换后的初始特征骨骼外表面控制点集p
s_c_i
为特征骨骼外表面控制点集p
c_c
;
[0068]
该步骤中,刚性变换后的两个点集形状已经大致对齐,但对于曲率变化较大的位置仍存在较大间隙,需采用非刚性配准方式使两个点集完全对齐,采用cpd(coherent point drift,相干点漂移)算法(变换矩阵类型为非刚性)将初始特征骨骼外表面控制点集p
s_c_i
向特征人体骨骼外表面点集pc进行配准,将变换后的初始特征骨骼外表面控制点集p
s_c_i
为特征骨骼外表面控制点集p
c_c
;
[0069]
具体的,对于采用cpd算法(变换矩阵类型为非刚性)将基准骨骼外表面控制点集p
s_c_i
向特征人体骨骼外表面点集pc进行配准,其变换关系如下:
[0070]
pc=t(p
s_c_i
,θ)
[0071]
其中t为转换关系,θ为p
s_c_i
的变换矩阵。
[0072]
在此步骤中,θ为刚性转化矩阵,包含旋转矩阵r,平移矩阵t,缩放比例s。
[0073]
步骤9、提取s3步骤中保存的基准骨骼有限元模型k文件中的网格顶点点集,标记为基准骨骼有限元点集fem
s_p
;
[0074]
步骤10、采用rbf(radial basis function,径向基函数)对基准骨骼有限元点集fem
s_p
进行变换,控制点集为基准骨骼外表面控制点集p
s_c
,目标点集为特征骨骼外表面控制点集p
c_c
,核函数采用tps(thin-plate splines,薄板样条)函数,变换后的基准骨骼有限元点集标记为特征骨骼有限元点集fem
c_p
;
[0075]
具体的,采用rbf(radial basis function,径向基函数)对基准骨骼有限元点集fem
s_p
进行变换,生成特征骨骼有限元点集fem
c_p
时,应满足下式:
[0076][0077]
其中,f(x,y,z)表示基准骨骼有限元点集fem
s_p
向特征骨骼有限元点集fem
c_p
变换函数。
[0078]
对于f(x,y,z),[x,y,z]表示空间坐标,可表示为下式:
[0079][0080]
其中,a0,a
x
,ay,az和wi是rbf-tps函数的权重系数,为核函数,本发明中具体为tps函数。
[0081]
因此,求解变换函数也就是求解rbf-tps函数的权重系数,可由下式求解获得:
[0082][0083]
其中,w=[w1,w2,w3,...,w
p
],qi=[1,xi,yi,zi],a=[a0,a
x
,ay,az],v=[v1,v2,v3,...,v
p
],i为单位矩阵。
[0084]
步骤11、将特征骨骼有限元点集fem
c_p
写入基准骨骼有限元模型k文件中,替代其中的网格顶点点集,生成特征人体骨骼有限元模型femc;
[0085]
步骤12、对网格质量通过雅克比、扁平比、翘曲度以及倾斜度进行判断,若s11步骤
中生成的特征人体骨骼有限元模型femc网格质量低于基准骨骼有限元模型fems,则重复步骤3,改变iss算法参数,重复步骤4-12;
[0086]
该步骤中,重复步骤3时,将近邻搜索点数设置为9,依次类推,最低设置为1,重复步骤4-12;
[0087]
步骤13、若生成的特征人体骨骼有限元模型femc网格质量等同或者高于基准骨骼有限元模型fems,则输出特征人体骨骼有限元模型femc[0088]
虽然上面结合本发明的优选实施例对本发明的原理进行了详细的描述,本领域技术人员应该理解,上述实施例仅仅是对本发明的示意性实现方式的解释,并非对本发明包含范围的限定。实施例中的细节并不构成对本发明范围的限制,在不背离本发明的精神和范围的情况下,任何基于本发明技术方案的等效变换、简单替换等显而易见的改变,均落在本发明保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1