一种基于局部显著性增强的CFAR舰船目标检测方法
一种基于局部显著性增强的cfar舰船目标检测方法
技术领域
1.本发明涉及雷达遥感应用技术领域,尤其是一种基于局部显著性增强的cfar舰船目标检测方法。
背景技术:
2.合成孔径雷达(synthetic aperture radar,sar)是一种主动式微波遥感器,能够获取高分辨率雷达图像,具备全天候、全天时工作的优点,且广泛应用于军事领域及海上交通管制、渔业管理等民用领域,因此研究高性能sar图像中的舰船目标检测具有重要意义。
3.传统的基于像素级的恒虚警率(constant false alarm rate,cfar)算法应用较为广泛,该检测方法以海杂波的统计建模为基础,利用目标与背景之间的灰度统计特性实现目标检测,然而海杂波散射复杂,统计建模困难,会造成检测器的检测性能恶化,并且利用sar图像中单一的灰度特征来辨别目标与杂波背景具有一定的困难。
4.近年来,显著特征增强理论逐渐应用到目标检测任务中,具有很大的潜力。在复杂环境中由于散斑噪声和舰船目标散射不均匀会引起舰船目标检测性能降低,尤其是对小尺度目标的检测。目前,针对复杂的多目标海洋环境,且小目标散射特性较弱、只在sar图像中占少量像素点的特性,对小目标检测性能的提高还存在一定的困难,仍然需要进一步的研究。
技术实现要素:
5.本发明的目的在于提供一种能够明显提高tcr、抑制散斑噪声,在比较复杂的多目标环境中具有较高的检测率和较低的虚警率的基于局部显著性增强的cfar舰船目标检测方法。
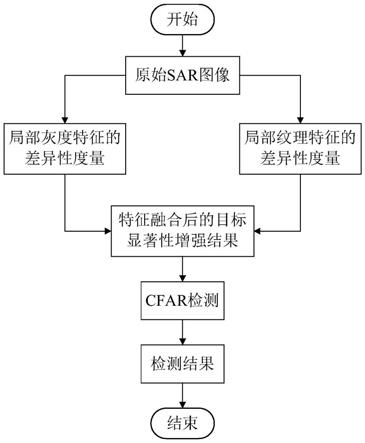
6.为实现上述目的,本发明采用了以下技术方案:一种基于局部显著性增强的cfar舰船目标检测方法,该方法包括下列顺序的步骤:
7.(1)获取待检测的原始sar图像,设计对角-斜对角线滑动窗口;
8.(2)对待检测的原始sar图像进行局部灰度特征差异性度量,得到局部灰度特征对比度检测结果;
9.(3)对待检测的原始sar图像进行局部纹理特征差异性度量,得到局部纹理特征对比度检测结果;
10.(4)融合局部灰度特征对比度检测结果和局部纹理特征对比度检测结果,得到目标增强显著图,然后根据目标增强显著图进行基于广义伽马分布的cfar目标检测,得到舰船目标检测结果。
11.所述步骤(1)具体是指:任选公开数据集hrsid中的多目标场景sar作为待检测的原始sar图像,设计对角-斜对角线滑动窗口,所述对角-斜对角线滑动窗口分为三层,第一层为目标窗口t,第二层为保护窗口p,第三层为对角-斜对角线上的四邻域背景窗口b1、b2、b3、b4。
12.所述步骤(2)具体是指:
13.基于局部窗口区域块间的灰度强度对比度,定义目标块与其周围杂波背景块之间的灰度非相似性,灰度非相似性的计算公式为:
[0014][0015]
其中,μ
t
表示局部滑窗区域中目标块的灰度均值,表示周围四个背景块的灰度均值;当时,目标块的灰度均值与周围杂波背景块的灰度均值相差越大,则灰度非相似性lg就越大;反之,当时,则不做灰度比较处理直接将灰度非相似性lg置1;
[0016]
结合目标块的强度特征,以及目标块与其周围杂波背景块间的灰度非相似性经局部滑窗处理,得到局部灰度特征对比度检测结果cg为:
[0017][0018]
式中,(p,q)为目标块t的中心坐标,表示目标块t的第j个最大灰度值,n为最大灰度值个数;当目标块的灰度均值大于背景块的灰度均值且相差越大时,对目标块的灰度增强效果就越强;反之,当目标块的灰度均值小于背景块的灰度均值时,则对目标块的灰度特征不做处理。
[0019]
所述步骤(3)具体是指:
[0020]
基于lbp描述的局部纹理结构的矩阵模式表示为:
[0021][0022]
其中,xc代表窗口中心像素点处的灰度值,x(i,j)表示该窗口区域中的任意像素点的灰度值,l代表窗口的大小;将s取值为1的像素点记为亮像素,将s取值为0的像素点记为暗像素;
[0023]
对局部lbp描述的非均匀纹理结构进行纹理强度特征值提取,则局部纹理强度特征值的计算公式如下:
[0024][0025]
式中,m=|x(i,j)-xc|,i,j=1,2,...,l表示l
×
l局部区域块的中心像素点与其余邻域像素点的灰度差的绝对值,则|d|
max
和|d|
min
分别表示灰度差值绝对值中的最大值与最小值,p(m)表示取值为m时的概率;
[0026]
对全局sar图像经滑窗计算得到局部纹理特征对比度检测结果c
te
为:
[0027][0028]
式中,lc
t
表示滑窗中心目标块的纹理强度特征值,表示周围杂波背景块的纹理强度特征值,表示l
×
l目标块区域中像素强度大于或等于中心像素强度的所有亮像素点的灰度均值;表示l
×
l目标块中像素强度小于中心像素强度的所有暗像素点的灰度均值,表示目标块的亮暗对比度。
[0029]
所述步骤(4)具体是指:
[0030]
融合局部灰度特征对比度检测结果和局部纹理特征对比度检测结果,其计算公式为:
[0031]cs
=cg×cte
[0032]
其中,cg为局部灰度特征对比度检测结果,c
te
为局部纹理特征对比度检测结果,cs为目标增强显著图;
[0033]
针对融合后的目标增强显著图进行基于广义伽马分布的cfar目标检测,具体是指:
[0034]
基于广义伽马分布模型对目标增强显著图cs进行cfar舰船目标检测,广义伽马分布的概率密度函数定义为:
[0035][0036]
上式中,δ、v和k分别代表尺度参数、功率参数和形状参数,γ(
·
)表示伽马函数;
[0037]
检测门限和虚警概率之间的关系为:
[0038][0039]
式中,q
inv
表示逆不完全伽马函数,p
fa
为虚警概率;
[0040]
基于上式计算所得的检测门限th针对目标增强显著图cs进行目标二值检测,即当cs中的任意像素点处的值大于或等于检测门限th时,则将该像素点视为目标像素点,反之,则视为背景像素点,得到舰船目标检测结果c
detection
表示为:
[0041][0042]
其中,(i,j)表示目标增强显著图cs中的任意像素点位置,当c
detection
(i,j)=1时,像素点表示目标像素,当c
detection
(i,j)=0时,像素点表示背景像素。
[0043]
由上述技术方案可知,本发明的有益效果为:第一,本发明能够很好地解决因散斑噪声和旁瓣等特征等所带来的目标检测准确率低虚警率高等缺点;第二,本发明结合灰度特征和纹理特征进行显著性增强处理,能够明显提高目标-杂波对比度tcr,在比较复杂的多目标环境中具有较好的目标增强效果和背景抑制效果,同时显著地提高了对小舰船目标
的检测性能。
附图说明
[0044]
图1为本发明的方法流程图;
[0045]
图2为对角-斜对角滑动窗口结构;
[0046]
图3为公开数据集hrsid中选取的原始待检测sar图像;
[0047]
图4为舰船目标检测结果图。
具体实施方式
[0048]
如图1所示,一种基于局部显著性增强的cfar舰船目标检测方法,该方法包括下列顺序的步骤:
[0049]
(1)获取待检测的原始sar图像,设计对角-斜对角线滑动窗口;
[0050]
(2)对待检测的原始sar图像进行局部灰度特征差异性度量,得到局部灰度特征对比度检测结果;
[0051]
(3)对待检测的原始sar图像进行局部纹理特征差异性度量,得到局部纹理特征对比度检测结果;
[0052]
(4)融合局部灰度特征对比度检测结果和局部纹理特征对比度检测结果,得到目标增强显著图,然后根据目标增强显著图进行基于广义伽马分布的cfar目标检测,得到舰船目标检测结果。
[0053]
所述步骤(1)具体是指:任选公开数据集hrsid中的多目标场景sar作为待检测的原始sar图像,如图3所示,该图像数据来源于sentinel-1b sar卫星图像,且图像尺寸为800
×
800像素,图像分辨率为3m;考虑到目标周围背景像素和旁瓣特征等对检测性能的影响,设计对角-斜对角线滑动窗口,如图2所示,所述对角-斜对角线滑动窗口分为三层,第一层为目标窗口即目标块t,第二层为保护窗口p,第三层为对角-斜对角线上的四邻域背景窗口b1、b2、b3、b4。
[0054]
所述步骤(2)具体是指:
[0055]
基于局部窗口区域块间的灰度强度对比度,定义目标块与其周围杂波背景块之间的灰度非相似性,灰度非相似性的计算公式为:
[0056][0057]
其中,μ
t
表示局部滑窗区域中目标块的灰度均值,表示周围四个背景块的灰度均值;当时,目标块的灰度均值与周围杂波背景块的灰度均值相差越大,则灰度非相似性lg就越大;反之,当时,则不做灰度比较处理直接将灰度非相似性lg置1;为了避免分母为零,ε一般取值为很小的正数。
[0058]
结合目标块的强度特征,以及目标块与其周围杂波背景块间的灰度非相似性经局部滑窗处理,得到局部灰度特征对比度检测结果cg为:
[0059][0060]
式中,(p,q)为目标块t的中心坐标,表示目标块t的第j个最大灰度值,n为最大灰度值个数;当目标块的灰度均值大于背景块的灰度均值且相差越大时,对目标块的灰度增强效果就越强;反之,当目标块的灰度均值小于背景块的灰度均值时,则对目标块的灰度特征不做处理。
[0061]
所述步骤(3)具体是指:由于在sar图像中舰船目标的高效检测单靠灰度特征不易实现,尤其是对于散射弱体积小的小舰船目标的检测,因此为了更准确地将舰船目标从复杂海杂波背景中提取出来,本发明主要针对目标与背景间的纹理差异性,对待检测的原始sar图像做了进一步的目标增强和背景抑制处理。
[0062]
局部二值模式(local binary pattern,lbp)是一种广泛用来描述图像区域纹理特征的描述算子,传统的lbp主要以3
×
3窗口内中心像素点的灰度值作为阈值,将邻域内的其余像素点进行划分,大于该像素点的记为明亮像素点,小于该灰度值的则为暗像素点。一般情况下,某像素点3
×
3邻域窗口的lbp模式为均匀模式,但随着窗口尺寸的增大,将导致lbp模式分布不均匀,且这种非均匀的lbp模式将能提供某像素点与其周围邻域像素点所组成的窗口区域中的更多信息表示。
[0063]
基于lbp描述的局部纹理结构的矩阵模式表示为:
[0064][0065]
其中,xc代表窗口中心像素点处的灰度值,x(i,j)表示该窗口区域中的任意像素点的灰度值,l代表窗口的大小,一般取值为大于或等于3的奇整数;将s取值为1的像素点记为亮像素,将s取值为0的像素点记为暗像素;
[0066]
原始sar图像中散斑噪声的存在及舰船目标散射的不均匀性会使得舰船目标与杂波背景的沟纹强度相对差异性较大,即舰船目标的沟纹明显强于杂波背景的沟纹。因此本发明基于lbp算子描述的非均匀纹理结构首先计算出局部窗口区域的中心像素点与其任意邻域像素点的灰度差,并完成对该局部区域的灰度差分统计,然后,结合区域灰度差分统计所得的纹理强度特征值和区域的亮暗对比度可以更好地表征局部区域的纹理信息。
[0067]
对局部lbp描述的非均匀纹理结构进行纹理强度特征值提取,则局部纹理强度特征值的计算公式如下:
[0068][0069]
式中,m=|x(i,j)-xc|,i,j=1,2,...,l表示l
×
l局部区域块的中心像素点与其余邻域像素点的灰度差的绝对值,则|d|
max
和|d|
min
分别表示灰度差值绝对值中的最大值与最小值,p(m)表示取值为m时的概率;
[0070]
对全局sar图像经滑窗计算得到局部纹理特征对比度检测结果c
te
为:
[0071][0072]
式中,lc
t
表示滑窗中心目标块的纹理强度特征值,表示周围杂波背景块的纹理强度特征值,表示l
×
l目标块区域中像素强度大于或等于中心像素强度的所有亮像素点的灰度均值;表示l
×
l目标块中像素强度小于中心像素强度的所有暗像素点的灰度均值,表示目标块的亮暗对比度。
[0073]
所述步骤(4)具体是指:
[0074]
融合局部灰度特征对比度检测结果和局部纹理特征对比度检测结果,其计算公式为:
[0075]cs
=cg×cte
[0076]
其中,cg为局部灰度特征对比度检测结果,c
te
为局部纹理特征对比度检测结果,cs为目标增强显著图;
[0077]
针对融合后的目标增强显著图进行基于广义伽马分布的cfar目标检测,具体是指:
[0078]
基于广义伽马分布模型对目标增强显著图cs进行cfar舰船目标检测,广义伽马分布的概率密度函数定义为:
[0079][0080]
上式中,δ、v和k分别代表尺度参数、功率参数和形状参数,γ(
·
)表示伽马函数;
[0081]
检测门限和虚警概率之间的关系为:
[0082][0083]
式中,q
inv
表示逆不完全伽马函数,p
fa
为虚警概率;
[0084]
基于上式计算所得的检测门限th针对目标增强显著图cs进行目标二值检测,即当cs中的任意像素点处的值大于或等于检测门限th时,则将该像素点视为目标像素点,反之,则视为背景像素点,得到舰船目标检测结果c
detection
表示为:
[0085][0086]
其中,(i,j)表示目标增强显著图cs中的任意像素点位置,当c
detection
(i,j)=1时,像素点表示目标像素,当c
detection
(i,j)=0时,像素点表示背景像素。
[0087]
对整幅目标增强显著图cs进行逐像素判断进而确定目标像素点和背景像素点,从而完成对目标的二值检测,如图4所示,由检测结果可以看出该发明能够准确检测出舰船目标且使得目标的检测性能得到了改善,尤其是对小目标的检测。
[0088]
综上所述,本发明主要利用sar图像中目标与背景的灰度特征在局部空间分布的
差异性和纹理特征的差异性进行目标增强和背景抑制处理,并基于目标增强显著图在一定的虚警概率下进行cfar舰船目标检测,通过大量实验证明该发明的有效性。本发明能够显著提高tcr且在多目标场景中进行目标检测时发生漏检和虚警的概率较小,能有效抑制散斑噪声的影响,显著提高目标的检测性能,尤其是小目标。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1