应用于清洁机器人的看门狗电路和清洁机器人的制作方法
1.本发明实施例涉及电路技术,尤其涉及一种应用于清洁机器人的看门狗电路和清洁机器人。
背景技术:
2.随着科技的发展,许多智能家电产品已经进入市场,并逐步被普通消费者所接受。其中,扫地机器人是被消费者接受程度最高的智能家电产品之一。
3.扫地机器人内部设置有吸尘组件或其他用于清洁的组件,通过预设程序或智能控制扫地机器人在待清洁区域行动,完成对待清洁区域地面的清洁。扫地机器人的行动和清洁都需要由内部的处理器进行控制,一般采用微控制单元 (microcontroller unit,mcu)作为扫地机器人的处理器。
4.为了确保扫地机器人的稳定工作,最主要的就是要确保mcu的稳定工作,一种解决方案是在mcu中内置看门狗功能。看门狗具有自动复位功能,在mcu 正常工作的情况下,mcu会周期性地向看门狗功能发送喂狗信号,若mcu出现故障未在预设周期内向看门狗功能发送喂狗信号,则看门狗功能就会向mcu 发送复位信号,使得mcu复位重启。
5.但目前大部分的扫地机器人都未配置看门狗功能,若出现故障则只能断电重启,配置了看门狗功能的扫地机器人也都是使用mcu内部自带的看门狗功能,mcu内置的看门狗功能需要mcu的使能启动才能开始工作,若mcu发生故障则看门狗功能可能同时失效,从而影响扫地机器人的稳定工作。
技术实现要素:
6.本发明提供一种应用于清洁机器人的看门狗电路和清洁机器人,以提高清洁机器人的使用体验。
7.第一方面,本发明实施例提供了一种应用于清洁机器人的看门狗电路,包括:看门狗芯片和独立供电电路;
8.独立供电电路通过清洁机器人的电池为看门狗芯片供电;
9.看门狗芯片通过喂狗管脚与复位管脚与清洁机器人的处理器单元连接,若喂狗管脚在预设周期内未接收到喂狗信号则通过复位管脚向处理器单元发送复位信号。
10.在第一方面一种可能的实现方式中,独立供电电路为ldo供电电路。
11.在第一方面一种可能的实现方式中,ldo供电电路包括ldo芯片和与所述ldo芯片匹配的外部电路;
12.ldo芯片包括输入管脚、输出管脚、接地管脚和使能管脚;
13.输入管脚与清洁机器人的电池输出端连接,输出管脚与看门狗芯片的电源输入管脚连接,使能管脚通过分压电阻与清洁机器人的电池输出端连接。
14.在第一方面一种可能的实现方式中,清洁机器人的电池输出端与ldo芯片的输入管脚之间还包括用于防止电流向所述电池倒灌的二极管。
15.在第一方面一种可能的实现方式中,ldo芯片的输出管脚通过至少一个滤波电容接地。
16.在第一方面一种可能的实现方式中,ldo芯片的输入管脚通过滤波电容接地。
17.在第一方面一种可能的实现方式中,看门狗芯片包括电源输入管脚、接地管脚、喂狗管脚和复位管脚。
18.在第一方面一种可能的实现方式中,喂狗管脚和复位管脚分别通过限流电阻与处理器单元连接。
19.在第一方面一种可能的实现方式中,喂狗管脚还通过下拉电阻接地。
20.第二方面,本发明实施例提供一种清洁机器人,包括:
21.清洁组件、处理器单元、行走组件和如第一方面任一种可能的实现方式的应用于清洁机器人的看门狗电路。
22.本发明实施例提供的应用于清洁机器人的看门狗电路和清洁机器人,包括:看门狗芯片和独立供电电路,独立供电电路通过清洁机器人的电池为看门狗芯片供电,看门狗芯片通过喂狗管脚与复位管脚与清洁机器人的处理器单元连接,若喂狗管脚在预设周期内未接收到喂狗信号则通过复位管脚向处理器单元发送复位信号,通过设置与处理器单元独立供电的看门狗芯片,可以在清洁机器人需要对处理器单元进行软件烧录时,避免看门狗芯片接收不到处理器单元发送的喂狗信号而向处理器单元发送复位信号的情况发生,提高了清洁机器人的使用体验。
附图说明
23.图1为本发明实施例提供的一种应用于清洁机器人的看门狗电路的结构示意图;
24.图2a和图2b为本发明实施例提供的另一种应用于清洁机器人的看门狗电路的结构示意图。
具体实施方式
25.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
26.本发明的清洁机器人是指家用的扫地机、拖地机、扫拖一体机、洗地机等用于家庭地面清洁的机器人。
27.看门狗是mcu中常用的功能,mcu周期性地向看门狗发送喂狗信号,使得看门狗获知mcu处于正常工作状态,若mcu在预设周期内未向看门狗发送喂狗信号,那么看门狗将向mcu发送复位信号,使得mcu复位。在mcu中设置看门狗功能,可以使mcu具有自动地复位重启功能。但若mcu自身出现故障,则内置于mcu中的看门狗功能将同样无法正常工作。
28.在清洁机器人中,使用mcu作为处理器单元,为了使清洁机器人能够稳定工作,可以在其中设置看门狗功能。但内置于mcu中的看门狗可能由于mcu 自身的故障而无法正常工作,且清洁机器人的mcu中的固件在生产、测试、使用等过程中都可能需要改变或升级,也就是需要向mcu中烧录新的程序,在此过程中,看门狗功能同样无法正常工作。
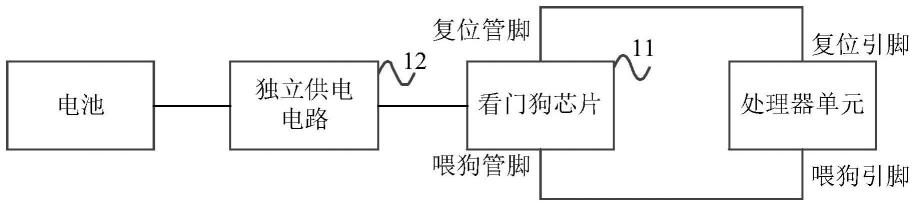
29.图1为本发明实施例提供的一种应用于清洁机器人的看门狗电路的结构示意图,
如图1所示,本实施例提供的应用于清洁机器人的看门狗电路包括:看门狗芯片11和独立供电电路12。
30.独立供电电路12通过清洁机器人的电池为看门狗芯片11供电。
31.本实施例提供的看门狗电路应用于清洁机器人中,采用独立于清洁机器人的处理器单元的设计,也就是将看门狗功能作为独立的电路,设置于清洁机器人的处理器单元之外。本实施例中的清洁机器人可以为任一种具有地面清洁功能的清洁机器人,清洁机器人至少包括清洁组件、处理器单元、行走组件。处理器单元控制行走组件行走,并控制清洁组件在行走过程中完成清洁。清洁机器人采用电池供电,电池为清洁组件、处理器单元和行走组件供电。其中,清洁机器人中的处理器单元例如为mcu。
32.本实施例提供的应用于清洁机器人的看门狗电路,使用独立的看门狗芯片 11实现看门狗功能。并且采用独立于处理器单元的独立供电电路12为看门狗芯片11供电。其中,独立供电电路12可以为低压差线性稳压器(low dropoutregulator,ldo)供电电路,ldo供电电路的纹波更小更可靠。ldo供电电路可以由ldo芯片和与所述ldo芯片匹配的外部电路组成。其中,ldo芯片包括输入管脚、输出管脚、接地管脚和使能管脚;输入管脚与清洁机器人的电池输出端连接,输出管脚与看门狗芯片11的电源输入管脚连接,使能管脚通过分压电阻与清洁机器人的电池输出端连接,使能管脚用于为ldo芯片提供初始状态。ldo芯片的外部电路由ldo芯片工作所需的各种器件所组成。例如清洁机器人的电池输出端与ldo芯片的输入管脚之间连接有用于防止电流向所述电池倒灌的二极管,该二极管可以称为续流二极管,用于避免ldo芯片向清洁机器人的电池倒灌电源。ldo芯片的输出管脚通过至少一个滤波电容接地,用于对输出至看门狗芯片11的电流滤波。ldo芯片的输入管脚通过滤波电容接地,用于对输入至ldo芯片的电流滤波。
33.看门狗芯片11包括喂狗管脚和复位管脚,看门狗芯片11通过喂狗管脚与清洁机器人的处理器单元的喂狗引脚,通过复位管脚与清洁机器人的处理器单元的复位引脚连接,若喂狗管脚在预设周期内未接收到处理器单元发送的喂狗信号则通过复位管脚向处理器单元发送复位信号。由本实施例提供的应用于清洁机器人的看门狗电路与处理器单元的配合,实现了清洁机器人处理器单元的看门狗功能。而为看门狗芯片11设置独立于处理器单元的独立供电电路12是为了对看门狗芯片11进行独立的供电控制,这样可以在需要对处理器单元进行软件烧录时,断开看门狗芯片11的供电,避免看门狗芯片11接收不到处理器单元发送的喂狗信号而向处理器单元发送复位信号的情况发生。
34.看门狗芯片11可以包括电源输入管脚、接地管脚、喂狗管脚和复位管脚。其中电源输入管脚与独立供电电路12的输出端连接,喂狗管脚与清洁机器人处理器单元的喂狗管脚连接,复位管脚与清洁机器人处理器单元的复位管脚连接。进一步地,看门狗芯片11的喂狗管脚和复位管脚还可以分别通过限流电阻与处理器单元连接。进一步地,看门狗芯片11的喂狗管脚还通过下拉电阻接地,下拉电阻用于为看门狗芯片11提供初始状态。
35.本实施例提供的应用于清洁机器人的看门狗电路,包括:看门狗芯片和独立供电电路,独立供电电路通过清洁机器人的电池为看门狗芯片供电,看门狗芯片通过喂狗管脚与复位管脚与清洁机器人的处理器单元连接,若喂狗管脚在预设周期内未接收到喂狗信号则通过复位管脚向处理器单元发送复位信号,通过设置与处理器单元独立供电的看门狗芯片,可以在清洁机器人需要对处理器单元进行软件烧录时,避免看门狗芯片接收不到处理
器单元发送的喂狗信号而向处理器单元发送复位信号的情况发生,提高了清洁机器人的使用体验。
36.图2a和图2b为本发明实施例提供的另一种应用于清洁机器人的看门狗电路的结构示意图,本实施例提供的应用于清洁机器人的看门狗电路为一种可选的具体电路结构示意图。其中,图2a为应用于清洁机器人的看门狗电路中独立供电电路的结构示意图,图2a为应用于清洁机器人的看门狗电路中看门狗芯片的结构示意图。其中,图2a中的ldo芯片u1与其他外部器件共同组成图1所示实施例中的独立供电电路12,图2b中的看门狗芯片u2为图1所示实施例中的看门狗芯片11。
37.在本实施例中,以清洁机器人电池为12v输出,通过降压电路降压至5v 后向ldo芯片u1供电,同时降压电路还向清洁机器人的处理器单元等其他器件供电,ldo芯片u1将输入的5v电压变压后向应用于清洁机器人的看门狗电路中的看门狗芯片u2为3.3v供电为例进行说明。
38.在图2a中,ldo芯片u1包括输入管脚vin、输出管脚out、接地管脚 vss和使能管脚ce,另外,图中的ldo芯片u1还包括nc管脚,nc管脚为无连接管脚,没有实际意义。
39.输入管脚vin与清洁机器人的电池输出端vcc_5v连接,输出管脚out 与看门狗芯片u2的电源输入管脚vcc连接,也就是看门狗芯片u2的电源端 wd_3.3v,使能管脚ce通过分压电阻r194和r195与清洁机器人的电池输出端vcc_5v连接。清洁机器人的电池输出端vcc_5v与ldo芯片u1的输入管脚vin之间还包括用于防止电流向所述电池倒灌的二极管d27。ldo芯片 u1的输出管脚out通过滤波电容c29、c31、c73接地。ldo芯片u1的输入管脚vin通过滤波电容c74接地。另外,ldo芯片u1的无连接管脚nc通过电容c75接地。
40.在图2b中,看门狗芯片u2包括电源输入管脚vcc、接地管脚gnd、喂狗管脚wdi和复位管脚nreset。图中的看门狗芯片u2还包括未连接的管脚nmr。喂狗管脚wdi通过限流电阻r94与清洁机器人的处理器单元的喂狗引脚mcu_wdi连接,复位管脚nreset通过限流电阻r50与清洁机器人的处理器单元的复位引脚cpu_rst连接。喂狗管脚wdi还通过下拉电阻r136接地。在看门狗芯片u2的电源输入管脚vcc和接地管脚gnd还连接有接地的滤波电容c79。看门狗芯片u2例如可以为sgm823。
41.清洁机器人的处理器单元正常工作时与看门狗芯片u2的喂狗管脚wdi相连的喂狗引脚mcu_wdi会输出一个方波信号,保证处理器单元正常工作时不会触发复位信号,一旦处理器单元异常或死机喂狗引脚就不会有方波信号输出,超过预设时间(例如1.6秒)看门狗芯片u2的喂狗管脚wdi没有电平变化就会把与处理器单元复位引脚相连的复位管脚nreset拉低,使处理器单元复位重启正常工作。看门狗芯片u2默认喂狗管脚wdi在预设时间(例如1.6秒) 后没有电平变化后复位管脚nreset就会拉低,一直这样循环,只有喂狗管脚 wdi有电平变化才不会动作,看门狗芯片u2还有欠压复位,电压低于预设电压阈值(例如2.9v)就会触发复位。
42.另外,本发明实施例还提供一种清洁机器人,包括:清洁组件、处理器单元、行走组件、和如图1或图2a、图2b所示的应用于清洁机器人的看门狗电路。
43.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行
了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1