一种光伏电池片在PECVD石墨舟中存在翘曲片的检测方法与流程
一种光伏电池片在pecvd石墨舟中存在翘曲片的检测方法
技术领域
1.本发明涉及基于机器视觉的光伏电池片的检测方法,更具体的是涉及一种光伏电池片在pecvd石墨舟中存在翘曲片的检测方法。
背景技术:
2.pecvd是借助微波或射频等使含有薄膜成分原子的气体电离,在局部形成等离子体,等离子体化学活性很强,容易发生反应,在基片上沉积出薄膜。pecvd石墨舟作为镀膜工艺生产时正常光伏电池片硅片的载体,结构中有很多具有一定间隔的舟页,而在两个相邻舟页之间有一个距离很窄的空间,舟页两侧则放置硅片。因石墨舟的材料石墨具有良好的导电和导热性能,在两个相邻舟页间通交流电压,使得两个相邻舟页形成正负极,若在镀膜过程中存在翘曲电池片,会导致相邻电极被硅片导通,在此附近形成强大电场,产生大量等离子体,从而在这部分区域会形成彩虹片,影响电池片的品质。
3.目前,光伏电池片在pecvd石墨舟中的翘曲片的检测,统计分析工作基本上完全是由人工完成。人如果长时间处于高度集中的工作中,人的眼睛和大脑会产生疲劳感,容易精力不集中,那么在工作过程中就会不可避免的出现错误,最后会影响结果统计的精确性和客观性,从而导致严重的经济损失。
技术实现要素:
4.为解决现有技术中人工检测光伏电池片在pecvd石墨舟中存在翘曲片的弊端,现提供基于机器视觉的一种光伏电池片在pecvd石墨舟中存在翘曲片的检测方法。
5.一种光伏电池片在pecvd石墨舟中存在翘曲片的检测方法,包括以下步骤:
6.s1、基于多相机的图像采集拼接:分别通过三个相机实时采集pecvd石墨舟局部舟槽图像信息,然后通过改进的基于归一化互信息的图像拼接算法,将三个相机采集的图像进行拼接,解决单相机在视野中无法完全覆盖舟槽中有效舟页而导致不能精确的检测舟槽中所有舟页的翘曲片问题,并利用熵相关系数来降低由于两幅图像的重叠区域小对图像拼接质量的影响;
7.s2、特征区域提取及定位编号:由于pecvd石墨舟材质及烧结工艺影响陶瓷套的灰度均匀度,从而导致陶瓷套灰度阈值分割困难的情况,在图像预处理的基础上提出基于hu-moments的形状匹配模板方法,将两舟页与舟页之间的陶瓷套为形状匹配模板,通过使用更显著的形状特征解决陶瓷套和舟页难以精确提取的问题,按照模板提取出各相应特征区域之后,根据特征区域中心行坐标的大小依次对提取出的特征区域进行编号;
8.s3、电池片区域提取:对于光伏电池片镀膜后成像不清晰而导致电池片横截面区域提取不完整情况,提出先以双边滤波器对待处理图像进行非线性处理,在保护电池片边缘的基础上达到降噪平滑的效果,gamma图像增强提升电池片与背景之间的对比度,再使用灰度学top-hat变换操作,根据电池片厚度设定合适的掩膜结构,区别开与电池片横截面区域相似而区域宽度有区别的舟页区域,只提取出电池片横截面区域;
9.s4、翘曲片区域提取:考虑到仅使用卷积核与被检测区域做卷积后进行峰值提取判断的方法精确度低,难以准确提取轻微翘曲片区域问题,并且翘曲片的形状特征是圆弧状,本发明创建一个基于隶属度函数的卷积核,将隶属度函数、单位梯度及法线方向信息引入到卷积核的设计中,以钟形函数为隶属度函数设计x方向与y方向的卷积核,分别与被检测区域的骨架区域的x方向与y方向的单位梯度图像进行卷积操作,操作后翘曲片区域骨架圆弧所在圆的中心区域会得到相应的增强,对增强的中心区域使用knn聚类算法进行分类操作,将分类后的区域再进行一次阈值筛选,并将最后的结果与翘曲片区域进行对应,即提取到所有翘曲片区域。在保证检测算法快速性和稳定性的同时,进而提高翘曲片区域提取的准确度;
10.s5、翘曲片区域定位:将基于特征区域的中心行坐标以及提取的翘曲片区域的中心行坐标按特定的规则进行对应,定位相应的翘曲片在舟槽中对应的具体位置。
11.优选地,s2中,分别通过三个相机实时采集pecvd石墨舟局部舟槽图像信息,然后通过改进的基于归一化互信息的图像拼接算法,将三个相机采集的图像进行拼接,解决单相机在视野中无法完全覆盖舟槽中有效舟页而导致不能精确的检测舟槽中所有舟页的翘曲片问题,并利用熵相关系数来降低由于两幅图像的重叠区域小对图像拼接质量的影响。具体步骤如下:
12.1)通过三个相机实时采集pecvd石墨舟局部舟槽图像信息;
13.2)基于归一化互信息的图像拼接算法。首先对三个相机采集其中相邻的x,y两幅图像的熵,以及两幅图像的联合熵进行计算,如式(1)(2)(3)所示:
[0014][0015][0016][0017]
其中p(x)、p(y)分别是随机变量x,y的概率密度函数,p
xy
(x,y)是两个随机变量x,y的联合概率密度函数。
[0018]
对于图像x、y来说,其互信息表示如式(4)所示:
[0019]
mi(x,y)=h(x)+h(y)-h(x,y)
ꢀꢀ
(4)
[0020]
当两幅图像相似度越高或重合部分越大时,其相关性也越大,联合熵越小,从而互信息就越大。由于x,y两幅图像之间的重叠区域对互信息影响比较大,如果待拼接的两幅图像的重叠区域太小,互信息就会很小,那么对图像拼接的准确度会造成影响。基于以上问题,提出在原有计算方式的基础上使用归一化和熵相关系数进行改进。
[0021]
归一化改进后的表达式如式(5)所示:
[0022][0023]
熵相关改进后的表达式如式(6)所示:
[0024][0025]
优选地,由于石墨舟运行过程中抖动及位置偏移的影响,本发明通过hu矩来保证模板匹配过程的平移不变性,旋转不变性,尺度不变性,基于hu-moments的形状模板匹配的具体方式为:
[0026]
计算图像f(x,y)在(i+j)阶的中心矩阵,在此基础上计算出归一化矩阵,如式(7)(8)所示:
[0027][0028][0029]
其中,i,j=0,1,2,
…
,
[0030]
利用hu矩算法计算出由二阶和三阶构造的七个不变矩,具体表达式如式(9)~(15)所示:
[0031]
i1=h
20
+h
02
ꢀꢀ
(9)
[0032][0033]
i3=(h
30-3h
12
)2+(3h
21-h
03
)2[0034]
i4=(h
30
+h
12
)2+(h
21
+h
03
)2ꢀꢀ
(12)
[0035][0036]
i6=(h
20-h
02
)[(h
30
+h
12
)
2-(h
21
+h
03
)2+ (14)4h
11
(h
30
+h
12
)(h
21
+h
03
)]
[0037]
i7=(3h
21-h
03
)(h
30
+h
12
)[(h
30
+h
12
)
2-3(h
21
+h
03
)2] (15)+(3h
12-h
30
)(h
03
+h
21
)[3(h
30
+h
12
)
2-(h
21
+h
03
)2]
[0038]
优选地,s3中双边滤波器对待处理图像进行非线性处理的具体步骤为:
[0039]
在5*5像素模板,σs,σr分别为5和20的基础上对图像f(x,y)分别计算出空间域核和像素值域核,其空间域核和像素值域核的表达式如式(16)(17)所示:
[0040][0041][0042]
双边滤波器的核函数是空间域核和像素值域核的综合结果,对原图像f(x,y)进行双边滤波的非线性处理,其公式如式(18)所示:
[0043][0044]
其中f(x,y)代表输入图像像素的值,f(m,n)代表掩膜中心像素的值。
[0045]
优选地,所述s3中使用gamma图像增强的具体步骤为:对图像i(x,y)归一化,将像素值转换为[0,1]之间的实数,利用如下公式(19)
[0046]
f(i)=i
γ
[0047]
在γ=2.2的基础上利用公式(19)提升电池片与背景之间的对(19)比度,使得舟页与电池片等高灰度区域得到增强,再对f(i)进行反归一化,将经过gamma图像增强后的实数值反变换为[0,255]之间的整数值。
[0048]
优选地,所述s3中灰度学top-hat变换的具体步骤为:
[0049]
在3*3像素模板b(s,t)的基础上利用式(20)(21)(22)对待处理图像f(x,y)先进行灰度腐蚀操作,再进行灰度膨胀操作,将宽高小于3的电池片横截面区域去除,再用原图与灰度开操作后的图像相减,利用式(23)完成灰度学top-hat变换,之后再对提取出的电池片横截面区域进行适当的对比度增强。
[0050][0051][0052][0053]
h(x,y)=f(x,y)-i(x,y)
[0054]
优选地,所述s3中使用动态阈值分割算法提取出电池片横截面区域的具体步骤为:
[0055]
计算以掩膜大小r*r为15*15的邻域内的灰度均值m(x,y)与标准方差s(x,y),如式(24)(25)所示:
[0056][0057][0058]
计算出该邻域内的阈值t(x,y),如式(26)所示:
[0059][0060]
其中r为标准差的动态范围,k为自定义的一个修正系数。
[0061]
优选地,所述s4中创建基于隶属度函数的卷积核的具体步骤为:
[0062]
根据测量可以得到pecvd石墨舟舟页的宽度为w,两舟页之间的距离为d,计算圆心标准圆的半径大小r,如式(27)所示:
[0063][0064]
以宽高尺寸大小为(2
×
(r+d)+1)*(2
×
(r+d)+1)创建c(x,y)卷积核,在本发明中使用的隶属度函数为钟形函数,电池片横截面骨架的像素点f(x,y)的隶属值为δ(x,y),如式(28)所示:
[0065][0066]
式中,
[0067]
将基于隶属度函数卷积核c定义为向量场,如式(29)所示:
[0068]
c=(c
x
,cy)
t
=(δ(x,y)cosθ,δ(x,y)sinθ)
ꢀꢀ
(29)
[0069]
其中x方向与y方向的卷积核c具体定义分别如式(30)(31)所示:
[0070][0071][0072]
其中θ和s的表达式分别为和
[0073]
计算出图像f(x,y)在位置(x,y)处的梯度向量表达式如式(32)和(33)所示:
[0074][0074]
[0075][0076]
梯度单位向量以及x方向与y方向的单位梯度表达式如式(34)、(35)和(36)所示:
[0077][0078][0079][0080]
根据上述原理分别得到电池片横截面骨架的x方向与y方向的单位梯度图像q
x
和qy,并设计完成x方向与y方向的卷积核c,然后分别利用式(37)进行卷积操作。
[0081][0082]
优选地,所述s4中使用knn聚类算法进行分类操作,knn聚类算法距离的度量采用欧式距离,如式(38)所示:
[0083][0084]
有益效果:
[0085]
(1)针对单相机在视野中无法完全覆盖舟槽中有效舟页而导致不能精确的检测舟槽中所有舟页的翘曲电池片,本发明在图像采集部分,分别通过三个相机实时采集pecvd石墨舟局部舟槽图像信息,然后通过改进的基于归一化互信息的图像拼接算法,将三个相机采集的图像进行拼接,并利用熵相关系数来降低由于两幅图像的重叠区域小对图像拼接质量的影响,使得拼接后的图像可以覆盖所有的翘曲电池片范围,相对于把每个相机的图像都进行一次翘曲电池片的提取再进行数据的整合操作既简洁了算法流程又节省了时间。
[0086]
(2)针对由于pecvd石墨舟材质及烧结工艺影响陶瓷套的灰度均匀度引起的陶瓷套进行灰度阈值分割困难情况,本发明在特征区域提取及位置编号部分,在图像预处理的基础上基于hu-moments的形状匹配模板方法,将两舟页与其之间的陶瓷套为形状匹配模板,通过使用更显著的形状特征按照形状模板匹配出各相应特征区域可以更精确的定位编号,为后续判断检测出的翘曲电池片的位置定位的准确性提供了保障。
[0087]
(3)针对光伏电池片镀膜后成像不清晰而导致电池片横截面区域提取不完整以及仅使用卷积核与被检测区域做卷积后进行峰值提取判断的方法精确度低,难以准确判断轻微翘曲电池片区域问题,本发明在翘曲电池片的提取部分,提出先以双边滤波器对待处理图像进行非线性处理,在保护电池片边缘的基础上达到降噪平滑的效果,gamma图像增强提升电池片与背景之间的对比度,再使用灰度学top-hat变换操作,根据电池片厚度设定合适的掩膜结构,区别开与电池片横截面区域相似而区域宽度有区别的舟页区域,只提取出电池片横截面区域。创建一个基于隶属度函数的卷积核,将隶属度函数、单位梯度及法线方向
信息引入到卷积核的设计中,以钟形函数为隶属度函数设计x方向与y方向的卷积核,分别与被检测区域的骨架区域的x方向与y方向的单位梯度图像进行卷积操作,操作后翘曲电池片区域骨架圆弧所在圆的中心区域会得到相应的增强,对增强的中心区域使用knn聚类算法进行分类操作,将分类后的区域再进行一次阈值筛选,并将最后的结果与翘曲电池片区域进行对应,即提取到所有翘曲电池片区域。在保证检测算法快速性和稳定性的同时,进而提高翘曲电池片提取的准确度。
[0088]
(4)基于数字图像处理和机器视觉不仅可以灵活的运用相关算法及技术对图像进行各种运算达到提取定位石墨舟中的翘曲电池片的目的,而且操作简单,处理稳定,节省人力,因此本发明具有很好的应用价值。
附图说明
[0089]
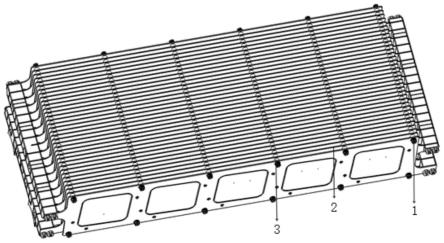
图1是pecvd石墨舟机械结构图。
[0090]
图2是一种光伏电池片在pecvd石墨舟中存在翘曲片的定位和检测方法流程图。
[0091]
图3是基于改进的归一化互信息算法的拼接图像。
[0092]
符号说明:
[0093]
1、陶瓷杆;2、舟页;3、陶瓷套。
具体实施方式
[0094]
为了加深对本发明的理解,下面将结合实施例和附图对本发明作进一步详述,该实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
[0095]
本发明提供了一种关于光伏电池片在pecvd石墨舟中存在翘曲片的检测方法。由于单相机在视野中无法完全覆盖舟槽中有效舟页2而导致不能精确的检测舟槽中所有舟页2的翘曲电池片,而且光伏电池片镀膜后成像不清晰而会导致电池片横截面区域提取不完整。基于上述问题,本发明公开了一种关于光伏电池片在pecvd石墨舟中存在翘曲片的检测方法。首先分别通过三个相机实时采集pecvd石墨舟局部舟槽图像信息,然后通过改进的基于归一化互信息的图像拼接算法,将三个相机采集的图像进行拼接,解决单相机在视野中无法完全覆盖舟槽中有效舟页2而导致不能精确的检测舟槽中所有舟页2的翘曲电池片问题,并利用熵相关系数来降低由于两幅图像的重叠区域小对图像拼接质量的影响。接着由于pecvd石墨舟材质及烧结工艺影响陶瓷套3的灰度均匀度引起的陶瓷套3进行灰度阈值分割困难情况,在图像预处理的基础上提出基于hu-moments的形状匹配模板方法,将两舟页2与其之间的陶瓷套3为形状匹配模板,通过使用更显著的形状特征解决陶瓷套3和舟页2难以精确提取的问题,按照模板提取出各相应特征区域之后,根据特征区域中心行坐标的大小依次对提取出的特征区域进行编号。接着对于光伏电池片镀膜后成像不清晰而导致电池片横截面区域提取不完整情况,提出先以双边滤波器对待处理图像进行非线性处理,在保护电池片边缘的基础上达到降噪平滑的效果,gamma图像增强提升电池片与背景之间的对比度,再使用灰度学top-hat变换操作,根据电池片厚度设定合适的掩膜结构,区别开与电池片横截面区域相似而区域宽度有区别的舟页2区域,只提取出电池片横截面区域。接着考虑到仅使用卷积核与被检测区域做卷积后进行峰值提取判断的方法精确度低,难以准确提取轻微翘曲电池片区域问题,由于翘曲电池片的形状是圆弧状,本发明创建一个基于隶属
度函数的卷积核,将隶属度函数、单位梯度及法线方向信息引入到卷积核的设计中,以钟形函数为隶属度函数设计x方向与y方向的卷积核,分别与被检测区域的骨架区域的x方向与y方向的单位梯度图像进行卷积操作,操作后翘曲电池片区域骨架圆弧所在圆的中心区域会得到相应的增强,对增强的中心区域使用knn聚类算法进行分类操作,将分类后的区域再进行一次阈值筛选,并将最后的结果与翘曲电池片区域进行对应,即提取到所有翘曲电池片区域。在保证检测算法快速性和稳定性的同时,进而提高翘曲电池片提取的准确度。最后将基于特征区域的中心行坐标以及提取的翘曲电池片区域的中心行坐标按特定的规则进行对应,得到相应的翘曲电池片在舟槽中对应的具体位置的定位。
[0096]
具体实施方式以本公司某项目的pecvd石墨舟为检测对象进行描述,参见图1,石墨舟作为镀膜工艺生产时正常光伏电池片硅片的载体,结构中有很多具有一定间隔的舟页2,而在两个相邻舟页2之间有一个距离很窄的空间,舟页2两侧则放置硅片。本发明采用visual studio集成开发工具进行检测系统人机界面开发,并使用c#语言编程,同时结合halcon机器视觉软件,实现各模块相关功能的编程和实验。
[0097]
一种光伏电池片在pecvd石墨舟存在翘曲片的检测方法,包括如下步骤:
[0098]
1、基于多相机图像采集及图像拼接:通过三个相机实时获取pecvd石墨舟局部舟槽图像,其中,相机型号为a7500mg20,镜头型号为mh1620m,光源型号为ppx-bo630126-b,光源控制器型号为ppx-dcp2430-4,三个相机分别等间隔安装在石墨舟上方,相机间距及离地间距均可灵活调节。计算机操作系统为windows7,处理器型号为intel(r)core(tm)2duo,显示器型号为thinkvision te22-11,主频为2.66ghz,内存为2gb。
[0099]
将采集的图像通过改进的基于归一化互信息的图像拼接算法,将三个相机采集的图像进行拼接,解决单相机在视野中无法完全覆盖舟槽中有效舟页而导致不能精确的检测舟槽中所有舟页的翘曲电池片问题,并利用熵相关系数来降低由于两幅图像的重叠区域小对图像拼接质量的影响。首先对三个相机采集其中相邻的x,y两幅图像的熵,以及两幅图像的联合熵进行计算,如式(39)(40)(41)所示:
[0100][0101][0102][0103]
其中p(x)、p(y)分别是随机变量x,y的概率密度函数,p
xy
(x,y)是两个随机变量x,y的联合概率密度函数。
[0104]
对于图像x、y来说,其互信息表示如式(42)所示:
[0105]
mi(x,y)=h(x)+h(y)-h(x,y)
ꢀꢀ
(42)
[0106]
当两幅图像相似度越高或重合部分越大时,其相关性也越大,联合熵越小,从而互信息就越大。由于x,y两幅图像之间的重叠区域对互信息影响比较大,如果待拼接的两幅图像的重叠区域太小,互信息就会很小,那么对图像拼接的准确度会造成影响。基于以上问
题,提出在原有计算方式的基础上使用归一化和熵相关系数进行改进。
[0107]
归一化改进后的表达式如式(43)所示:
[0108][0109]
熵相关改进后的表达式如式(44)所示:
[0110][0111]
2、特征区域提取及定位编号:由于pecvd石墨舟材质及烧结工艺影响陶瓷套的灰度均匀度引起的陶瓷套进行灰度阈值分割困难情况,在图像预处理的基础上提出基于hu-moments的形状匹配模板方法,将两舟页与其之间的陶瓷套为形状匹配模板,通过使用更显著的形状特征解决陶瓷套和舟页难以精确提取的问题,按照模板提取出各相应特征区域之后,根据特征区域中心行坐标的大小依次对提取出的特征区域进行编号。具体步骤如下:
[0112]
(1)将两相邻舟页与中间的陶瓷套区域的局部图像制作为形状匹配模板,用于后续的匹配操作。
[0113]
(2)基于hu-moments的形状模板匹配。由于石墨舟运行过程中抖动及位置偏移的影响,本发明通过hu矩来保证模板匹配过程的平移不变性,旋转不变性,尺度不变性。计算图像f(x,y)在(i+j)阶的中心矩阵,在此基础上计算出归一化矩阵,如式(45)(46)所示:
[0114][0115][0116]
其中,i,j=0,1,2,
…
,
[0117]
利用hu矩算法计算出由二阶和三阶构造的七个不变矩,具体表达式如式(47)~(53)所示:
[0118]
i1=h
20
+h
02
ꢀꢀ
(47)
[0119][0120]
i3=(h
30-3h
12
)2+(3h
21-h
03
)2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(49)
[0121]
i4=(h
30
+h
12
)2+(h
21
+h
03
)2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(50)
[0122][0123]
i6=(h
20-h
02
)[(h
30
+h
12
)
2-(h
21
+h
03
)2+ (52)4h
11
(h
30
+h
12
)(h
21
+h
03
)]
[0124]
i7=(3h
21-h
03
)(h
30
+h
12
)[(h
30
+h
12
)
2-3(h
21
+h
03
)2]+(3h
12-h
30
)(h
03
+h
21
)[3(h
30
+h
12
)
2-(h
21
+h
03
)2]
[0125]
(53)
[0126]
3、电池片区域提取:对于光伏电池片镀膜后成像不清晰而导致电池片横截面区域提取不完整情况,提出先以双边滤波器对待处理图像进行非线性处理,在保护电池片边缘的基础上达到降噪平滑的效果,gamma图像增强提升电池片与背景之间的对比度,再使用灰度学top-hat变换操作,根据电池片厚度设定合适的掩膜结构,区别开与电池片横截面区域相似而区域宽度有区别的舟页区域,只提取出电池片横截面区域。算法流程如下:
[0127]
(1)双边滤波器:在5*5像素模板,σs,σr分别为5和20的基础上对图像f(x,y)分别计算出空间域核和像素值域核,其空间域核和像素值域核的表达式如式(54)(55)所示:
[0128][0129][0130]
双边滤波器的核函数是空间域核和像素值域核的综合结果,对原图像f(x,y)进行双边滤波的非线性处理,在保护电池片边缘的基础上达到降噪平滑的效果。其公式如式(56)所示:
[0131][0132]
其中f(x,y)代表输入像素的值,f(m,n)代表掩膜中心像素的值。
[0133]
(2)gamma图像增强:先对图像i(x,y)归一化,将像素值转换为[0,1]之间的实数,在γ=2.2的基础上利用公式(57)提升电池片(57)与背景之间的对比度,使得舟页与电池片等高灰度区域得到增强,再对f(i)进行反归一化,将经过gamma图像增强后的实数值反变换为[0,255]之间的整数值。
[0134]
f(i)=i
γ
[0135]
(3)灰度学top-hat变换:在3*3像素模板b(s,t)的基础上利用式(58)(59)(60)对待处理图像f(x,y)先进行灰度腐蚀操作,再进行灰度膨胀操作,将宽高小于3的电池片横截面区域去除,再用原图与灰度开操作后的图像相减,利用式(61)完成灰度学top-hat变换,之后再对提取出的电池片横截面区域进行适当的对比度增强。
[0136][0137][0138][0139]
h(x,y)=f(x,y)-i(x,y)
ꢀꢀ
(61)
[0140]
(4)动态阈值分割:使用动态阈值分割算法提取出电池片横截面区域,用于后续翘曲片区域的判别。计算以掩膜大小r*r为15*15的邻域内的灰度均值m(x,y)与标准方差s(x,y),如式(62)(63)所示:
[0141][0142][0143]
计算出该邻域内的阈值t(x,y),如式(64)所示:
[0144][0145]
其中r为标准差的动态范围,k为自定义的一个修正系数。
[0146]
4、翘曲电池片提取:本实施例采用本发明所提出的一个基于隶属度函数的卷积核,将隶属度函数、单位梯度及法线方向信息引入到卷积核的设计中,以钟形函数为隶属度函数设计x方向与y方向的卷积核,分别与被检测区域的骨架区域的x方向与y方向的单位梯度图像进行卷积操作,操作后翘曲电池片区域骨架圆弧所在圆的中心区域会得到相应的增强,对增强的中心区域使用knn聚类算法进行分类操作,并将分类出的结果与翘曲电池片区域进行对应,即提取到所有翘曲电池片区域。在保证检测算法快速性和稳定性的同时,进而提高翘曲电池片提取的准确度。算法流程如下:
[0147]
(1)创建卷积核c(x,y):根据测量可以得到pecvd石墨舟舟页的宽度为w,两舟页之间的距离为d,计算圆心标准圆的半径大小r,如式(65)所示:
[0148]
以宽高尺寸大小为(2
×
(r+d)+1)*(2
×
(r+d)+1)创建c(x,y)卷积核,在本发明中使用的隶属度函数为钟形函数,电池片横截面骨架的像素点f(x,y)的隶属值为δ(x,y),如式(66)所示:
[0149][0150]
式中,
[0151]
将基于隶属度函数卷积核c定义为向量场,如式(67)所示:
[0152]
c=(c
x
,cy)
t
=(δ(x,y)cosθ,δ(x,y)sinθ)
ꢀꢀ
(67)
[0153]
其中x方向与y方向的卷积核c具体定义分别如式(68)(69)所示:
[0154][0155][0156]
其中θ和s的表达式分别为和
[0157]
(2)梯度单位向量:计算出图像f(x,y)在位置(x,y)处的梯度向量表达式如式(70)和(71)所示:
[0158][0159][0160]
梯度单位向量以及x方向与y方向的单位梯度表达式如式(72)、(73)和(74)所示:
[0161][0162][0163][0164][0165]
(3)卷积操作:根据上述原理分别得到电池片横截面骨架的x方向与y方向的单位梯度图像q
x
和qy,并设计完成x方向与y方向的卷积核c,然后分别利用式(75)进行卷积操作。
[0166][0167]
(4)knn聚类算法:经过上一步卷积操作后,会对翘曲电池片骨架所在圆的中心位
置进行有效的增强,对增强后的中心区域利用knn聚类算法进行分类操作,将分类后的区域再进行一次阈值筛选,并将最后的结果与翘曲电池片区域进行对应,即提取到所有翘池片区域。knn聚类算法距离的度量采用欧式距离,如式(76)所示:
[0168]
5、翘曲电池片定位:将基于特征区域的中心行坐标以及提取的翘曲电池片区域的中心行坐标按特定的规则进行对应,得到相应的翘曲电池片在舟槽中对应的具体位置的定位。
[0169]
作为进一步改进,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1