基于三维路面的道路边界生成方法及装置与流程
本技术涉及计算机,具体而言,涉及一种基于三维路面的道路边界生成方法及装置。
背景技术:
1、电子地图是利用计算机技术,以数字方式存储和查阅的地图。人们在步行、骑行或者驾驶时,均可以通过查阅电子地图来获取去往目的地的路线,并且还可以通过开启智能导航功能实时导航。为了提高用户体验以及提高电子地图查询的准确度,已逐渐从二维电子地图发展为三维电子地图。生成三维电子地图最关键的环节之一就是生成三维路面。相关技术中,主要依靠激光雷达采集路网三维点,并从路网三维点中提取路面三维点,基于路面三维点生成三维路面。然而,基于激光雷达生成三维路面不但成本较高,而且在基于该三维路面对停止线、人行道、导流带等路面要素进行质量检查和修正时,难以准确、快速获得质量检查和修正时所需的参考线,即道路边界线。
技术实现思路
1、本技术提供了一种基于三维路面的道路边界生成方法及装置,能够解决基于激光雷达生成三维路面成本较高、难以准确、快速获得道路边界线的问题。
2、具体的技术方案如下:
3、第一方面,本技术实施例提供了一种基于三维路面的道路边界生成方法,方法包括:
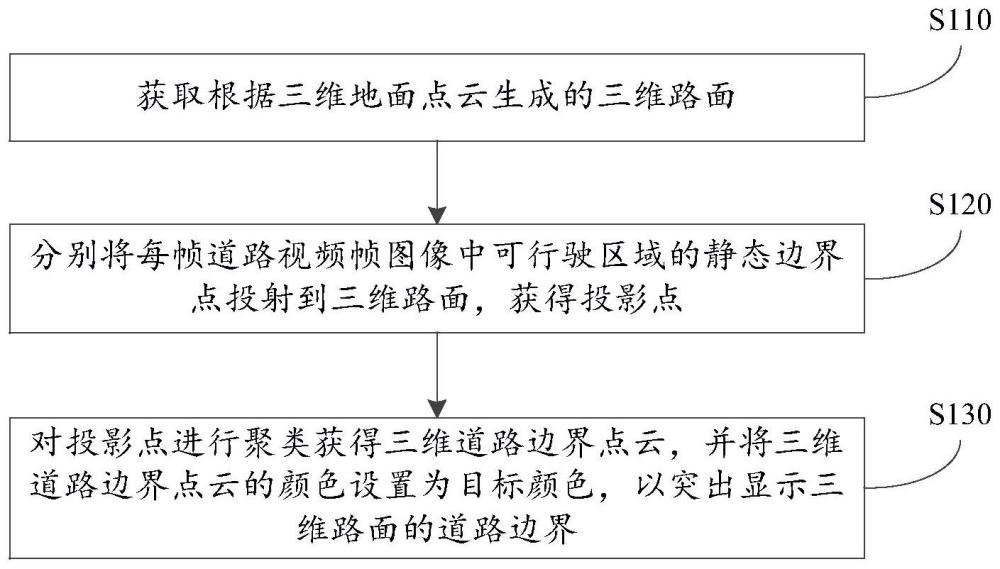
4、获取根据三维地面点云生成的三维路面,三维地面点云包括根据相机位姿信息生成的三维地面点,相机位姿信息包括道路视频帧图像被采集时相机的位姿,相机为采集车上安装的相机;
5、分别将每帧道路视频帧图像中可行驶区域的静态边界点投射到三维路面,获得投影点,投影点为三维地面点云中的三维地面点;
6、对投影点进行聚类获得三维道路边界点云,并将三维道路边界点云的颜色设置为目标颜色,以突出显示三维路面的道路边界。
7、通过上述方案可知,本技术实施例可以根据采集车相机生成的道路视频帧图像对应的相机位姿信息生成三维地面点云,并根据三维地面点云生成三维路面,从而实现基于纯视觉的路面生成过程,而无需依赖昂贵的激光雷达,进而可以降低成本。在生成三维路面之后,还可以通过将每帧道路视频帧图像中可行驶区域的静态边界点投射到三维路面,获得投影点,并对投影点进行聚类、着色,从而可以突出显示三维路面的道路边界,进而在基于该三维路面对停止线、人行道、导流带等路面要素进行质量检查和修正时,可以准确、快速获得质量检查和修正时所需的参考线,即道路边界线。
8、在第一方面的第一种可能的实现方式中,在对投影点进行聚类获得三维道路边界点云之前,方法还包括:
9、将目标距离大于或者等于距离阈值的投影点进行丢弃,目标距离为道路视频帧图像中的静态边界点向三维路面的投射距离;和/或,
10、将位于可行驶区域占位路面的路面区域内的投影点进行丢弃,可行驶区域占位路面为根据三维路面生成的、用于区别显示路面区域和非路面区域的路面。
11、通过上述方案可知,本技术实施例可以将投射距离较远、位于路面区域的投影点等异常点进行删除后,再进行聚类,从而可以提高道路边界的准确率。
12、在第一方面的第二种可能的实现方式中,在将位于可行驶区域占位路面的路面区域内的投影点进行丢弃之前,方法还包括:
13、通过坐标系转换确定三维地面点云中每个三维地面点在目标道路视频帧图像中的映射点,目标道路视频帧图像为获得三维地面点所使用的相机位姿信息所对应的道路视频帧图像;
14、针对每个待涂色的三维地面点,在目标映射点位于可行驶区域的路面区域的情况下,将待涂色的三维地面点的颜色设置为第一预设颜色,在目标映射点位于可行驶区域的非路面区域的情况下,将待涂色的三维地面点的颜色设置为第二预设颜色,以生成可行驶区域占位路面,目标映射点为待涂色的三维地面点对应的映射点。
15、在第一方面的第三种可能的实现方式中,在将三维道路边界点云的颜色设置为目标颜色之前,方法还包括:
16、提取三维道路边界点云中的中心点,获得第一线状道路边界点云;
17、以第一线状道路边界点云为中心,向两边拓宽预设距离,获得第二线状道路边界点云;
18、为第二线状道路边界点云中每个边界点增加目标高度,获得第三线状道路边界点云;
19、将三维道路边界点云的颜色设置为目标颜色包括:
20、将第三线状道路边界点云的颜色设置为目标颜色。
21、通过上述方案可知,本技术实施例通过对原始得到的三维道路边界点云进行提中心、拓宽、提升高度等处理,可以确保最终显示的道路边界有足够的宽度能够清晰可见,使得道路边界更加准确。
22、在第一方面的第四种可能的实现方式中,获取根据三维地面点云生成的三维路面,包括:
23、根据二维网格化后的矢量语义地图中每个二维网格内的三维地面点数量,从二维网格中筛选出特定二维网格;
24、对每个特定二维网格内三维地面点按照高度进行聚类,获得每个特定二维网格内包含的第一目标曲面,第一目标曲面为三维曲面;
25、将第一目标曲面确定为三维路面。
26、在第一方面的第五种可能的实现方式中,在将第一目标曲面确定为三维路面之前,方法还包括:
27、针对每个待拟合第一目标曲面,根据待拟合第一目标曲面内的三维地面点和与待拟合第一目标曲面连接的至少一个其他第一目标曲面内的三维地面点,对待拟合第一目标曲面进行二次曲面拟合,获得待拟合第一目标曲面对应的第二目标曲面,其中,待拟合第一目标曲面为待进行二次曲面拟合的第一目标曲面,各个第一目标曲面的连接关系根据各个第一目标曲面对应的特定二维网格之间的连接关系以及高度确定;
28、将第一目标曲面确定为三维路面,包括:
29、将第一目标曲面对应的第二目标曲面确定为三维路面。
30、在第一方面的第六种可能的实现方式中,根据二维网格化后的矢量语义地图中每个二维网格内的三维地面点数量,从二维网格中筛选出特定二维网格,包括:
31、针对二维网格化后的矢量语义地图中每个待判断的二维网格,在待判断的二维网格内三维地面点数量大于或者等于目标数量阈值的情况下,确定待判断的二维网格为特定二维网格,在待判断的二维网格内三维地面点数量小于目标数量阈值的情况下,确定待判断的二维网格不是特定二维网格。
32、第二方面,本技术实施例提供了一种基于三维路面的道路边界生成装置,装置包括:
33、获取单元,用于获取根据三维地面点云生成的三维路面,三维地面点云包括根据相机位姿信息生成的三维地面点,相机位姿信息包括道路视频帧图像被采集时相机的位姿,相机为采集车上安装的相机;
34、投射单元,用于分别将每帧道路视频帧图像中可行驶区域的静态边界点投射到三维路面,获得投影点,投影点为三维地面点云中的三维地面点;
35、聚类单元,用于对投影点进行聚类获得三维道路边界点云;
36、设置单元,用于将三维道路边界点云的颜色设置为目标颜色,以突出显示三维路面的道路边界。
37、通过上述方案可知,本技术实施例可以根据采集车相机生成的道路视频帧图像对应的相机位姿信息生成三维地面点云,并根据三维地面点云生成三维路面,从而实现基于纯视觉的路面生成过程,而无需依赖昂贵的激光雷达,进而可以降低成本。在生成三维路面之后,还可以通过将每帧道路视频帧图像中可行驶区域的静态边界点投射到三维路面,获得投影点,并对投影点进行聚类、着色,从而可以突出显示三维路面的道路边界,进而在基于该三维路面对停止线、人行道、导流带等路面要素进行质量检查和修正时,可以准确、快速获得质量检查和修正时所需的参考线,即道路边界线。
38、在第二方面的第一种可能的实现方式中,装置还包括:第一丢弃单元和/或第二丢弃单元;
39、第一丢弃单元,用于在对投影点进行聚类获得三维道路边界点云之前,将目标距离大于或者等于距离阈值的投影点进行丢弃,目标距离为道路视频帧图像中的静态边界点向三维路面的投射距离;
40、第二丢弃单元,用于将位于可行驶区域占位路面的路面区域内的投影点进行丢弃,可行驶区域占位路面为根据三维路面生成的、用于区别显示路面区域和非路面区域的路面。
41、在第二方面的第二种可能的实现方式中,装置还包括:
42、确定单元,用于在将位于可行驶区域占位路面的路面区域内的投影点进行丢弃之前,通过坐标系转换确定三维地面点云中每个三维地面点在目标道路视频帧图像中的映射点,目标道路视频帧图像为获得三维地面点所使用的相机位姿信息所对应的道路视频帧图像;
43、生成单元,用于针对每个待涂色的三维地面点,在目标映射点位于可行驶区域的路面区域的情况下,将待涂色的三维地面点的颜色设置为第一预设颜色,在目标映射点位于可行驶区域的非路面区域的情况下,将待涂色的三维地面点的颜色设置为第二预设颜色,以生成可行驶区域占位路面,目标映射点为待涂色的三维地面点对应的映射点。
44、在第二方面的第三种可能的实现方式中,装置还包括:
45、提取单元,用于在将三维道路边界点云的颜色设置为目标颜色之前,提取三维道路边界点云中的中心点,获得第一线状道路边界点云;
46、拓宽单元,用于以第一线状道路边界点云为中心,向两边拓宽预设距离,获得第二线状道路边界点云;
47、增加单元,用于为第二线状道路边界点云中每个边界点增加目标高度,获得第三线状道路边界点云;
48、设置单元,用于将第三线状道路边界点云的颜色设置为目标颜色。
49、在第二方面的第四种可能的实现方式中,获取单元,包括:
50、筛选模块,用于根据二维网格化后的矢量语义地图中每个二维网格内的三维地面点数量,从二维网格中筛选出特定二维网格;
51、聚类模块,用于对每个特定二维网格内三维地面点按照高度进行聚类,获得每个特定二维网格内包含的第一目标曲面,第一目标曲面为三维曲面;
52、确定模块,用于将第一目标曲面确定为三维路面。
53、在第二方面的第五种可能的实现方式中,获取单元,还包括:
54、拟合模块,用于在将第一目标曲面确定为三维路面之前,针对每个待拟合第一目标曲面,根据待拟合第一目标曲面内的三维地面点和与待拟合第一目标曲面连接的至少一个其他第一目标曲面内的三维地面点,对待拟合第一目标曲面进行二次曲面拟合,获得待拟合第一目标曲面对应的第二目标曲面,其中,待拟合第一目标曲面为待进行二次曲面拟合的第一目标曲面,各个第一目标曲面的连接关系根据各个第一目标曲面对应的特定二维网格之间的连接关系以及高度确定;
55、确定模块,用于将第一目标曲面对应的第二目标曲面确定为三维路面。
56、在第二方面的第六种可能的实现方式中,筛选模块,用于针对二维网格化后的矢量语义地图中每个待判断的二维网格,在待判断的二维网格内三维地面点数量大于或者等于目标数量阈值的情况下,确定待判断的二维网格为特定二维网格,在待判断的二维网格内三维地面点数量小于目标数量阈值的情况下,确定待判断的二维网格不是特定二维网格。
57、第三方面,本技术实施例提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面任一可能的实现方式所述的方法。
58、第四方面,本技术实施例提供了一种电子设备,电子设备包括:
59、一个或多个处理器;
60、存储装置,用于存储一个或多个程序,
61、当一个或多个程序被一个或多个处理器执行,使得电子设备实现如第一方面任一可能的实现方式所述的方法。
62、第五方面,本技术实施例提供了一种车辆,车辆包含如第二方面任一可能的实现方式所述的装置,或者包含如第四方面所述的电子设备。
- 还没有人留言评论。精彩留言会获得点赞!