一种高分遥感影像建筑物变化的检测方法
1.本发明涉及建筑物变化的检测方法,尤其涉及一种高分遥感影像建筑物变化的检测方法。
背景技术:
2.近年来,随着遥感技术的飞速发展,遥感影像的获取变得更加便捷。与传统实地勘测手段相比,遥感影像具有覆盖范围广、空间分辨率高等诸多优势,可为城市规划、环境监测、土地变化等方面能够提供更加详细、丰富的决策支持信息。其中,对建筑物开展变化检测是城市动态监测的重要内容,已经成为遥感领域的一个研究热点。
3.按照变化检测基元的不同,目前常用的建筑物变化检测方法主要可以分为像素级和对象级两类。其中,像素级变化检测方法通过直接比较匹配像素对之间的差异来获得检测结果。然而,不同时相遥感图像由于尺度、图像质量以及成像条件不同可能导致突出的“伪变化”问题,而像素级方法通常对这些“伪变化”非常敏感;此外,孤立的像素无法完整地表达地物以及地物间的关系,难以有效应对高分遥感影像中普遍存在的“同物异谱、异物同谱”现象。
4.相较于像素级方法,对象级变化检测(obcd,object-based change detection)检测对象固有形状及尺寸进行特征提取,对配准误差、噪声等具有更高的顽健性。例如,陈奎伊等利用高度分析提取建筑物轮廓信息,基于倾斜影像重建的实景三维模型,对城市全要素做多次切割,获取不同高度下地物的轮廓特征,并根据其轮廓变化率精确提取建筑物,进一步基于轮廓线对建筑物进行三维模型的精细重建后,以建筑物基底轮廓为对象,利用建筑物的最小外接矩形对其进行对象级变化检测,分析中高层建筑物的变化检测结果;javed aisha等应用变化向量分析、主成分分析和迭代重加权多元蚀变检测3种方法于mbi图像,将像素级变化检测扩展到对象级变化检测,得到新建成建筑物区域结果;卢丽琛等综合bmi、cva、em算法进行面向对象的高分辨率遥感影像建筑物变化检测,将结果二值化输出为建筑物变化区域和未变化区域;刘海飞等根据建筑物的角点和规则的外观形状特点,对两时相影像线段进行综合处理使其共享线特征,基于此生成对应的矩形搜索区,并在区域内进行超像素合并得到包含地物结构信息的结构面对象作为基本分析单元,最后为每个基本分析单元构建特征向量,通过监督分类获取发生变化的建筑区域。尽管如此,已有方法主要聚焦于建筑物的是否变化,而无法反映建筑物的更新改造等其他变化类型,且具有较大的使用局限性,降低了其在实际应用中的参考价值。
技术实现要素:
5.发明目的:本发明的目的是提供一种能提高建筑物变化检测精度、细化建筑物的变化类型的高分遥感影像建筑物变化的检测方法。
6.技术方案:本发明的检测方法,包括步骤如下:
7.s1,获取某一地区在不同时相下的异源高分遥感影像数据集,并对异源高分遥感
影像数据集进行配准、融合及分割,得到统一的对象集合;
8.s2,在已获取分割结果的基础上,构建证据集合;所述证据集合包括非建筑物指数nbi、两时相影像的建筑物指数mbi以及两时相影像间的差分信息;
9.s3,基于对象在不同时相影像中的阴影特征,提取证据置信度指标;
10.s4,采用d-s证据理论进行决策融合,输出面向对象的细粒度建筑物变化检测结果。
11.进一步,所述步骤s2中,构建的证据集合包括:前/后时相的非建筑物指数,前/后时相的建筑物指数以及多时相差分特征;具体实现步骤如下:
12.s21,提取前/后时相的非建筑物指数nbi
13.对于分割结果中的任一对象ti,定义非建筑物指数nbi:
[0014][0015]
其中,ndvi为归一化差异植被指数,ndwi为归一化差值水体指数,pr为ti的矩形度;pwl为长宽比,pwlm为遍历所有对象后所得到的长宽比最大值;s为面积指标,令
[0016][0017]
其中,si为ti的面积:si=r2×
ni,r代表该幅遥感影像的分辨率,ni代表第i个对象内像素点的总数;sa定义为建筑物面积标准值;
[0018]
根据nbi值的大小,提取前/后时相的非建筑物指数nbi分别为n
1i
和n
2i
;
[0019]
s22,提取前/后时相的建筑物指数mbi
[0020]
所述前/后时相的建筑物指数mbi的提取步骤如下:
[0021]
s221,计算亮度值:
[0022][0023]
其中,bandk(x)为第k光谱波段在像素x处的亮度值,k为可见光光谱最大波段数,并将可见光波段每个像素的最大值作为该像素的亮度值;
[0024]
s222,形态学白帽重构:
[0025][0026]
其中,为对亮度图像b的形态学开运算;d和v分别代表线性结构元素的方向和尺度;
[0027]
s223,计算微分形态学剖面dmp:
[0028]
dmp
wth
(d,v)=|wth(d,(v+δv))-wth(d,v)|
[0029]
s224,计算建筑物指数mbi:
[0030][0031]
其中,v=((v
max-v
min
)/δv+1,d为计算建筑物剖面时的方向数;v
max
,v
min
分别为线性结构元素的尺度最大值、最小值,δv为其尺度变化步长;
[0032]
对建筑物指数mbi结果进行孔洞填补,提取前/后时相建筑物指数mbi分别为λ
1i
和λ
2i
;
[0033]
s23,获得证据集合
[0034]
定义差分特征:
[0035][0036]
其中,z为对象ti中的像素点总数,σ
1k
、σ
2k
为对象ti中第k个像素点分别在两时相中的对应像素值,σ
max
为第k个像素点在两幅影像中像素值的最大值;
[0037]
此时,结合两时相nbi指数、两时相mbi指数和两时相差分特征,获得最终的证据集合ri={n
1i
,n
2i
,λ
1i
,λ
2i
,ci}。
[0038]
进一步,所述步骤s3中,基于证据集合ri,采用d-s证据理论,将阴影作为变化检测的中“伪变化”,提取证据置信度指标的具体步骤如下:
[0039]
s31,采用阴影检测方法进行阴影检测;
[0040]
s32,将彩色的rgb图像转换为hsv图像,通过类间方差g值确定二值化阈值m:
[0041]
g=ω0(μ
0-μ)2+ω1(μ
1-μ)2[0042]
其中,ω0为灰度值小于m的前景像素点数占整幅图像的比例,μ0为其平均灰度;ω1为灰度值大于m的背景像素点数占整幅图像的比例,μ1为其平均灰度;μ为图像的总平均灰度;
[0043]
当完成遍历后,g=g
max
时,分割阈值m为最佳二值分割阈值;再对图像进行形态学开闭运算以修补空洞及滤除孤立点,获得阴影检测结果;
[0044]
此时,计算得出对象ti在双时相影像中的阴影区域占比分别为p、q,从而获得ti的证据置信度ii:
[0045]ii
=(1-p)
×
(1-q)。
[0046]
进一步,所述步骤s4中,输出建筑物变化检测结果的具体实现步骤如下:
[0047]
s41,定义识别框架f=[n,d,r,u,o],将对象划分为新建类n、拆除类d、改建类r、未变化类u和其它类o,则焦元包括[n]、[d]、[r]、[u]、[o]、[n,d,r,u,o];
[0048]
s42,根据步骤s2所提取的证据集合,共构建5个mass函数m1、m
2、
m3、m4、m5;
[0049]
若设新建类n为焦元,f上的5个mass函数的dempster合成规则为:
[0050][0051]
其中,归一化系数nk为在第k个mass函数中判决为焦元n;
[0052]
s43,对任意对象ti建立概率赋值函数bpaf,设定前一时相的nbi指数n1的mass函数m1,则概率赋值函数bpaf的表达式如下:
[0053]m1i
({n})=0.5
×n1i
×ii
[0054]m1i
({d})=0.35
×
(1-n
1i
)
×ii
[0055]m1i
({r})=0.3
×
(1-n
1i
)
×ii
[0056]m1i
({u})=0.35
×
(1-n
1i
)
×ii
[0057]m1i
({o})=0.5
×n1i
×ii
[0058]m1i
({n,d,r,u,o})=1-ii[0059]
其中,ii为步骤s31所提取的证据置信度;ri={n
1i
,n
2i
,λ
1i
,λ
2i
,ci}为每个尺度证据所提供的指数全集,在其余mass函数中ri取集合中的其余证据对应项;n
1i
为对象ti在前一时相中由nbi指数得到其为非建筑物的概率,n
2i
为对象ti在后一时相中由nbi指数得到其为非建筑物的概率;λ
1i
为对象ti在前一时相中由mbi得到其为建筑物的概率,λ
2i
为其在后一时相中由mbi得到其为建筑物的概率;ci用于描述对象ti在前后两时相的变化程度;
[0060]
s44,根据概率赋值函数值,确定对象ti的所属类别。
[0061]
进一步,确定对象ti的所属类别的判断如下:
[0062]
p1,属于n类的ti满足:
[0063]
mi([n])》0.25,或mi([n])》0.15∧mi([r])》0.1;
[0064]
p2,属于d类的ti满足:
[0065]
mi([d])》0.25,或mi([d])》0.15∧mi([r])》0.1;
[0066]
p3,属于r类的ti满足:
[0067]
mi([r])》0.25,
[0068]
或{mi([n])》0.1∨mi([d])》0.1}∧mi([r])》0.1∧mi([o])《0.3;
[0069]
p4,属于u类的ti满足:
[0070]
mi([u])》0.3,且mi([o])《0.3;
[0071]
p5,否则,ti属于o类;
[0072]
其中,“∧”代表逻辑“与”,“∨”代表逻辑“或”;
[0073]
根据上述判决规则,输出细粒度建筑物变化检测结果,最终将影像中的所有对象划分为新建类、拆除类、改建类、未变类以及非建筑物类。
[0074]
本发明与现有技术相比,其显著效果如下:
[0075]
1、本发明基于影像多尺度分割结果,综合多重因素首先设计了一种非建筑物指标nbi,与差分信息、建筑物指数mbi所共同组成的证据集合,能够实现优势互补,融合了不同尺度证据的优势;
[0076]
2、利用阴影检测结果,提出了一种证据置信度指标,进而构建了一套完整的d-s证据理论变化检测模型,从而将建筑物划分为新建、拆除以及改建类;与现有技术相比,本发明的变化检测精度和kappa系数分别达80%和0.7以上,在目视分析和定量评价中效果显著。
附图说明
[0077]
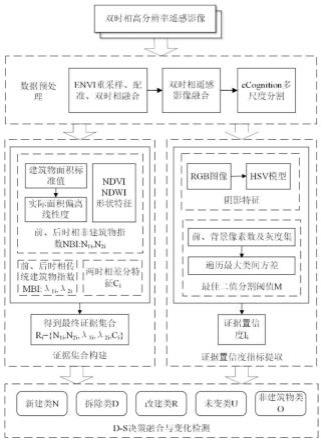
图1为本发明的总流程示意图;
[0078]
图2(a)为数据集1的银川1地区时相一gf-1影像示意图,
[0079]
图2(b)为数据集1的银川1地区时相二gf-2影像示意图,
[0080]
图2(c)为数据集1的细粒度建筑物变化检测结果参考图,
[0081]
图2(d)为数据集1的本发明细粒度建筑物变化检测结果图,
[0082]
图2(e)为数据集1的二值化参考图,
[0083]
图2(f)为数据集1的本发明二值化结果图,
[0084]
图2(g)为数据集1的策略1结果图,
[0085]
图2(h)为数据集1的策略2结果图;
[0086]
图2(i)为数据集1的策略3结果图;
[0087]
图3(a)为数据集2的银川1地区时相一gf-1影像示意图,
[0088]
图3(b)为数据集2的银川1地区时相二gf-2影像示意图,
[0089]
图3(c)为数据集2的细粒度建筑物变化检测结果参考图,
[0090]
图3(d)为数据集2的本发明细粒度建筑物变化检测结果图,
[0091]
图3(e)为数据集2的二值化参考图,
[0092]
图3(f)为数据集2的本发明二值化结果图,
[0093]
图3(g)为数据集2的策略1结果图,
[0094]
图3(h)为数据集2的策略2结果图;
[0095]
图3(i)为数据集2的策略3结果图;
[0096]
图4(a)为时相一典型区域1影像示意图,
[0097]
图4(b)为时相二典型区域1影像示意图,
[0098]
图4(c)为区域1参考图,
[0099]
图4(d)为区域1本发明第一结果图,
[0100]
图4(e)为区域1参考图2,
[0101]
图4(f)为区域1本发明第二结果图,
[0102]
图4(g)为区域1策略1结果图,
[0103]
图4(h)为区域1策略2结果图;
[0104]
图4(i)为区域1策略3结果图;
[0105]
图5(a)为时相一典型区域2影像示意图,
[0106]
图5(b)为时相二典型区域2影像示意图,
[0107]
图5(c)为区域2参考图,
[0108]
图5(d)为区域2本发明第一结果图,
[0109]
图5(e)为区域2参考图2,
[0110]
图5(f)为区域2本发明第二结果图,
[0111]
图5(g)为区域2策略1结果图,
[0112]
图5(h)为区域2策略2结果图;
[0113]
图5(i)为区域2策略3结果图;
[0114]
注:图2(c)~(i)、图3(c)~(i)、图4(c)~(i)、图5(c)~(i)中各子图的颜色标识如下:
[0115][0116]
图6为不同建筑物区面积标准值下数据集总体精度变化趋势。
具体实施方式
[0117]
下面结合说明书附图和具体实施方式对本发明做进一步详细描述。
[0118]
本发明基于d-s证据理论,提出了一种面向建筑物的细粒度变化检测方法。该方法不仅提供了建筑物、非建筑物的变化检测结果,更进一步将建筑物变化划分为新建、拆除以及改建三种类型。在影像分割基础上,首先综合对象的面积、矩形度、长宽比等特征,设计了一种非建筑物指数(non building index,nbi);此外,结合对象轮廓提取了相应的建筑物指数mbi、差分信息以及基于阴影检测的证据置信度指标;最后,综合以上“证据”作为d-s决策模型的输入,提出了一种细粒度建筑物变化类型识别模型。多组实验表明,所提出的模型的总体精度可达85%以上,在提高了建筑物变化检测精度的同时更精细化划分了建筑物的变化类型。
[0119]
(一)实现过程
[0120]
如图1所示,本发明的方法包括步骤如下:
[0121]
步骤s1,数据预处理
[0122]
获取某一地区在不同时相下的异源高分遥感影像数据集后对其进行配准、融合及分割,得到统一的对象集合。
[0123]
影像的预处理阶段,具体包括多时相影像的重采样、配准及分割。首先,采用商业软件envi进行重采样及配准处理;在影像分割阶段,基于目前非常流行的商业软件ecognition,利用影像中不同波段的权重、紧致度以及平滑度,通过设置分割尺度参数对融合影像进行分割,从而获得后续开展对象级变化检测的分析基元集合。本发明所使用的分割参数设置为:分割尺度为100,形状因子为0.4,紧致度为0.8。
[0124]
步骤s2,证据集合构建
[0125]
在已获取分割结果的基础上,构建证据集合,具体包括非建筑物指数nbi、两时相影像的建筑物指数mbi以及两时相影像间的差分信息。
[0126]
面向建筑物变化检测任务,本发明构建的证据集合主要由五个部分构成:前、后时相的非建筑物指数,前、后时相的建筑物指数以及多时相差分特征。
[0127]
步骤s21,前、后时相非建筑物指数nbi提取
[0128]
传统的建筑物指数mbi基于光谱的强对比度特征,描述了像素属于建筑物的可能性。另一方面,目前定量评价像素属于非建筑物的指标还不多见,而其对于准确判别建筑物变化具有重要参考价值。为此,本发明对于分割结果中的任一对象ti,在综合矩形度、长宽比、面积、ndvi植被指数及ndwi水体指数的基础上,设计了一种非建筑物指数nbi,如公式(1)所示。
[0129][0130]
其中,ndvi为归一化差异植被指数,ndwi为归一化差值水体指数,pr为ti的矩形度;pwl为长宽比,pwlm为遍历所有对象后所得到的长宽比最大值。s为面积指标,由于建筑物通常具有一定面积但不会过大或过小,因此令
[0131][0132]
其中,si为ti的面积:si=r2×
ni,r代表该幅遥感影像的分辨率,ni代表第i个对象内像素点的总数。sa定义为建筑物面积标准值,本发明所取的建筑物区面积标准值sa的值为2000m2。若其nbi值越大,则该对象属于非建筑物对象的可能性越大;反之则该对象属于建筑物的可能性越大。在此基础上,对前、后时相提取非建筑物指数nbi,分别得到n
1i
和n
2i
。
[0133]
步骤s22,前、后时相建筑物指数mbi提取
[0134]
形态学建筑物指数mbi主要考虑了建筑物的光谱结构特征,包括亮度、局部对比度、形状、大小及方向性等,并进行系列形态学操作。具体提取步骤如下:
[0135]
步骤s221:计算亮度值。
[0136][0137]
其中,bandk(x)为第k光谱波段在像素x处的亮度值,k为可见光光谱最大波段数。由于可见光波段对建筑物光谱信息影响较大,将可见光波段每个像素的最大值作为该像素的亮度值。
[0138]
步骤s222:形态学白帽重构。
[0139][0140]
其中,为对亮度图像b的形态学开运算,而d和v分别代表线性结构元素的方向和尺度。
[0141]
步骤s223:计算微分形态学剖面dmp(differential morphological profiles)。
[0142]
dmp
wth
(d,v)=|wth(d,(v+δv))-wth(d,v)|
ꢀꢀꢀ
(5)
[0143]
步骤s224:计算mbi指数。
[0144][0145]
其中,v=((v
max-v
min
)/δv+1,d为计算建筑物剖面时的方向数。本发明所采用的v
max
=105,v
min
=5,δv=25。而通过mbi所提取的较大区域建筑物对象内部往往会因存在异质性干扰因素导致提取结果的不完整性,本发明对mbi结果进行孔洞填补,以提高建筑物区域提取精度。在此基础上,提取前、后时相建筑物指数mbi分别为λ
1i
和λ
2i
。
[0146]
步骤s23,两时相差分特征
[0147]
在提取了统一的对象基元的基础上,进一步提取两时相影像间的光谱差分特征,具体步骤为,定义差分特征:
[0148][0149]
其中,z为对象ti中的像素点总数,σ
1k
、σ
2k
为对象ti中第k个像素点分别在两时相中的对应像素值,σ
max
为第k个像素点在两幅影像中像素值较大值。此时,结合两时相nbi指数、两时相mbi指数和两时相差分特征,可获得最终的证据集合ri={n
1i
,n
2i
,λ
1i
,λ
2i
,ci}。步骤s3,提取证据置信度指标
[0150]
基于对象在不同时相影像中的阴影特征,提取证据置信度指标。
[0151]
基于证据集合ri,本发明采用d-s证据理论(dempster-shafer envidence theory)进行决策融合,从而实现细粒度建筑物变化程度划分。相较于传统概率推理理论,d-s证据理论所需先验数据更加直观、容易、不需过多处理且其具有能够综合异源信息作为证据支持的优点。此外,考虑到阴影作为变化检测中“伪变化”的主要来源,本发明设计了一种考虑阴影因素的证据置信度指标ii,作为度量不同证据可信程度的依据。
[0152]
阴影是高分遥感影像变化检测中“伪变化”的主要来源之一。为此,本发明首先采用阴影检测方法进行阴影检测。通过将彩色的rgb图像转换为hsv图像,基于公式(8)所计算的类间方差g值从而确定二值化阈值m。
[0153]
g=ω0(μ
0-μ)2+ω1(μ
1-μ)2ꢀꢀꢀ
(8)
[0154]
其中,ω0为灰度值小于m的前景像素点数占整幅图像的比例,μ0为其平均灰度;ω1为灰度值大于m的背景像素点数占整幅图像的比例,μ1为其平均灰度;μ为图像的总平均灰度。当完成遍历后,g=g
max
时,所采用分割阈值m即为所求最佳二值分割阈值。在此基础上,对图像进行形态学开闭运算以修补空洞及滤除孤立点,从而获得阴影检测结果。此时,可计算得出对象ti在双时相影像中的阴影区域占比分别为p、q,从而获得ti的证据置信度:
[0155]ii
=(1-p)
×
(1-q)
ꢀꢀꢀ
(9)
[0156]
s4,输出建筑物变化检测结果;利用d-s证据理论进行决策融合,输出面向对象的细粒度建筑物变化检测结果。
[0157]
首先定义识别框架f=[n,d,r,u,o],将对象划分为新建类n、拆除类d、改建类r、未变化类u和其它类o,则焦元包括[n]、[d]、[r]、[u]、[o]、[n,d,r,u,o]。基于步骤s2所提取的证据集合,共构建5个mass函数m1、m
2、
m3、m4、m5。若设新建类n为焦元f上的5个mass函数的dempster合成规则为:
[0158][0159]
其中,归一化系数nk为在第k个mass函数中判决为焦元n。因此,可对任意对象ti建立基本概率赋值函数bpaf,以前一时相的nbi指数n1的mass函数m1为例,其bpaf公式具体如下:
[0160]m1i
({n})=0.5
×n1i
×ii
ꢀꢀꢀ
(11)
[0161]m1i
({d})=0.35
×
(1-n
1i
)
×ii
ꢀꢀꢀ
(12)
[0162]m1i
({r})=0.3
×
(1-n
1i
)
×ii
ꢀꢀꢀ
(13)
[0163]m1i
({u})=0.35
×
(1-n
1i
)
×ii
ꢀꢀꢀ
(14)
[0164]m1i
({o})=0.5
×n1i
×ii
ꢀꢀꢀ
(15)
[0165]m1i
({n,d,r,u,o})=1-iiꢀꢀꢀ
(16)
[0166]
其中,ii为步骤s31所提取的证据置信度。ri={n
1i
,n
2i
,λ
1i
,λ
2i
,ci}为每个尺度证据所提供的指数全集,在其余mass函数中ri取集合中的其余证据对应项。n
1i
为对象ti在前一时相中由nbi指数得到其为非建筑物的概率,n
2i
为对象ti在后一时相中由nbi指数得到其为非建筑物的概率;λ
1i
为对象ti在前一时相中由mbi得到其为建筑物的概率,λ
2i
为其在后一时
相中由mbi得到其为建筑物的概率;ci用于描述对象ti在前后两时相的变化程度。
[0167]
采用如下判别规则对建筑物变化进行细粒度划分的基础依据在于对象ti属于某类的可能性越大,则该类对应的概率分配函数值应当越大:
[0168]
①
属于n类的ti应满足:mi([n])》0.25,或mi([n])》0.15∧mi([r])》0.1;
[0169]
②
属于d类的ti应满足:mi([d])》0.25,或mi([d])》0.15∧mi([r])》0.1;
[0170]
③
属于r类的ti应满足:mi([r])》0.25,或{mi([n])》0.1∨mi([d])》0.1}∧mi([r])》0.1∧mi([o])《0.3;
[0171]
④
属于u类的ti应满足:mi([u])》0.3,且mi([o])《0.3;
[0172]
⑤
否则,ti属于o类。
[0173]
其中,“∧”代表逻辑“与”,“∨”代表逻辑“或”。
[0174]
根据上述判决规则,输出细粒度建筑物变化检测结果,最终将影像中的所有对象划分为新建类、拆除类、改建类、未变类以及非建筑物类共5个类别。
[0175]
(二)实验与分析
[0176]
为验证所提出方法的有效性和精度,本发明实验采用2组异源高分遥感影像数据。2组数据采用中国宁夏回族自治区银川市不同地区的高分一号(gf-1)和高分二号(gf-2)异源r、g、b三波段影像,空间分辨率分别为2m和0.81m,采集时间分别为2018年及2020年。经重采样+配准后的2组图像尺寸均为1024像素
×
1024像素,分辨率为2m。
[0177]
为了验证本发明所提出方法的有效性,采用三种先进的方法进行对比实验。
[0178]
策略1:基于面向对象的方法,利用mbi算法提取建筑物并采用cva算法进行变化检测得到全部对象差异度,最后利用em算法的贝叶斯阈值计算方法确定变化阈值,叠加光谱特征和建筑物指数特征形成多个特征,更明显地体现了像斑的差异度,构建特征空间,提高了最终建筑物变化检测的结果精度;
[0179]
策略2:利用改进双边滤波器提高对象内部像素间空间结构一致性后,通过on-off通道小目标抑制、基于矩形度长宽比的传统建筑物提取及大津法分类,减少了因“伪变化”所造成的检测误差。
[0180]
策略3:一种基于d-s证据理论融合特征信息的变化检测方法,在影像分割的基础上利用变化矢量分析法计算对象前后光谱、纹理特征差异及形态学建筑物指数差异,以sigmoid函数作为隶属度函数从而构建bpaf,最后利用d-s证据理论进行特征融合及规则判定得到建筑物变化区域。
[0181]
1)一般结果与分析
[0182]
本发明的方法与对比方法的变化检测结果如图2(a)-(i)、图3(a)-(i)所示。
[0183]
其中,由于本发明将变化建筑物划分为新建、拆除和改建类,为此本发明用不同灰度值代表不同的变化类型,同时用方框标识出了一些典型区域以便进一步的目视分析。此外,由于两种对比方法均为二分类方法,因此在对比实验中本发明将新建、拆除、改建类均归为变化,从而基于二值影像进行目视和定量评价类。
[0184]
为了进一步验证本发明所提出的细粒度建筑物变化检测模型的有效性,选取了图2(a)中2块代表性区域进行局部目视分析,局部放大结果如图4(a)-(i)、图5(a)-(i)所示。
[0185]
根据图4(a)-(i)进行对比分析,在原图像中左上部分实际为新增建筑物区域。由于阴影部分占比较高,且建筑物与周围阴影区域差异较小,从图4(e)~(i)部分可以看出,
策略1、策略3采用mbi及策略2的传统方法均无法准确地识别该区域在后期影像中实为建筑物区域。而本发明采用阴影特征作为证据置信度指标提取后,能够在d-s决策输出判决规则下更好地发挥证据集合内各个证据的优势,将该区域判定为建筑物新增类。右侧中部部分实际为改建建筑物区域,由于其不规则的分割形状,策略2所采用的传统建筑物提取方法无法正确识别,而策略3在结合了光谱、纹理特征后,将该处改建建筑物区剔除。策略1所采用的mbi及cva变化向量检测及本发明方法均能正确提取该区域,且由图4(c)、图4(d),在本发明的输出模型下,能够将该区域更加精确地输出为建筑物改建类区域。
[0186]
由图5(c)~(i)可以看出,相较于策略1、策略2,本发明方法表现出来良好的检测性能,所设计的nbi指数能够利用ndwi、面积指数及形状特征,准确地筛除在两年的城市规划中转变为水体、空地等的非建筑物区域,正确地提取该建筑物拆除区域。而由于该区域前期影像中建筑物较小而密集,策略1、策略2对建筑物区域检测不明确,错检率、漏检率较高,对比之下本发明的检测精度较高,与参考图的结果更为一致;而在没有阴影影响的情况下,同样使用了证据理论的策略3和本发明检测结果与参考图较为一致,但在本发明提出的nbi所用的面积阈值下,本发明相较于策略3的检测结果进一步剔除了2处错误区域,结果与实际更为一致。
[0187]
2)定量评价
[0188]
本发明采用总体精度、误检率及kappa系数对2组细粒度建筑物变化检测结果进行定量分析。精度评价结果分别如下表1、表2所示。
[0189]
表1本发明方法数据集1细粒度建筑物变化检测精度
[0190][0191]
表2本发明方法数据集2细粒度建筑物变化检测精度
[0192][0193]
表1、表2的实验精度可以证明,所构建的融合证据集合进行d-s决策融合后能够有效区分地区建筑物与非建筑物并对所得的变化建筑物进行进一步分类检测输出。实验总体精度达80%且kappa系数大于0.7,分类结果与实际结果一致性较为理想。
[0194]
根据图2(e)~(h)和图3(e)~(h),对本发明的方法与对比方法进行精度评价,结果如下表3、表4所示。
[0195]
表3本发明及对比方法数据集1精度
[0196][0197]
表4本发明及对比方法数据集2精度
[0198][0199]
从基于表3、表4的定量分析来看,本发明方法的变化检测结果总体精度在3组对比中均为最高,虽在数据集2中漏检率略有提高,但总体一致性最高,体现了所构建的证据集合内部各证据之间良好的互补性,基于阴影检测提取证据置信度后d-s决策融合模型的有效性,提高了变化检测的总体精度。
[0200]
3)面积参数分析
[0201]
由于本发明所构建的证据集合中,非建筑物指数部分建筑物区面积标准值sa的设置对非建筑物指数结果具有显著影响。为此,设置建筑物区面积标准值sa取值区间为[500,5000],步长500,在数据集1、数据集2实验中分析建筑物区面积标准值sa设定与细粒度建筑物变化检测输出结果精度之间的关系,实验结果与变化趋势如图6所示。
[0202]
由图6可以看出,数据集1在建筑物区面积标准值sa从500增长到2000时,细粒度建筑物变化检测总体精度上升;当建筑物区面积标准值sa从2000增长到3000时,细粒度建筑物变化检测总体精度相对持平但缓慢下降;当建筑物区面积标准值sa从3000增长到5000时,细粒度建筑物变化检测总体精度呈下降趋势;数据集2在建筑物区面积标准值sa从500增长到1500时,细粒度建筑物变化检测总体精度上升;当建筑物区面积标准值sa从1500增长到2000时,细粒度建筑物变化检测总体精度相对持平但缓慢上升;当建筑物区面积标准值sa从2000增长到5000时,细粒度建筑物变化检测总体精度呈下降趋势。综合数据集1、2,本发明建议在实际应用中设定sa为2000。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1