基于物理信息神经网络的大气颗粒物粒度演化分析方法
1.本发明涉及大气颗粒物的粒度演化技术领域,特别涉及一种大气颗粒物的粒度演化分析方法。
背景技术:
2.伴随着经济的快速发展,工业生产带来的环境问题越来越成为人们关注的焦点。因此,研究颗粒物的粒度演化对解决空气污染问题具有重要意义。
3.大气中的气溶胶是由悬浮在气体中的微粒和气体共存形成的一种多相流体系,多相流体系是指不同相物质混合流动的体系,自然界的流动多为多相流流动,大气颗粒物的变化过程也是如此。在大气颗粒物流动的过程中存在着布朗凝并等现象,将颗粒群方程进行布朗凝并现象的仿真可以得到较为准确的粒度分布演化预测,这对大气颗粒物的分析和大气污染的治理具有重要意义。
4.在大气颗粒物的监测中发现颗粒物的粒径分布会随着时间的变化而变化,这是由于颗粒之间存在相互作用,如聚并、破碎、成核等,这就意味着需要在常见的能量守恒和质量守恒后添加颗粒群平衡来更好的预测颗粒的变化,针对常见的颗粒群平衡模型的解法有离散法、标准矩方法、积分矩方法等,但其常见问题是需要网格,网格的质量会对计算准确度产生巨大影响,同时由于计算量大,局限多等问题使得颗粒分布的预测变得困难。
5.综上所述,提出一种新的针对大气颗粒物粒度演化的分析方法,提高预测粒度演化的速度和精度变得尤为重要。
技术实现要素:
6.本发明的目的在于提供一种为大气颗粒物的研究提供快速准确预测粒度分布演化的计算方法。该方法基于物理信息神经网络将颗粒群体平衡模型与粒度分布演化相结合,实现了针对布朗凝并现象的大气颗粒物粒度分布演化的预测,该方法速度快、精度高、无需网络和大量数据。
7.本发明的技术方案为:
8.基于物理信息神经网络的大气颗粒物的粒度演化分析方法,其具体步骤如下:
9.步骤1.根据实际情况下大气颗粒物的粒径大小范围[v
min
,v
max
] 和演化的时间长度[0,t],来确定样本点抽取的范围r[v,t],其中ν∈[v
min
,v
max
],t∈[0,t]。
[0010]
再利用拉丁超立方抽样的方法,分别抽取r的内部点uf和初始点即t=0时的点ub作为数据集。
[0011]
步骤2.对颗粒群平衡方程利用高斯积分进行离散化处理,得到离散后可在计算机中表示的颗粒群平衡方程。
[0012]
步骤3.构建前馈神经网络,将步骤2中处理后的方程作为损失函数嵌入到神经网络中,结合adam和l-bfgs优化算法对前馈神经网络的权值和阈值进行优化。
[0013]
步骤4.将步骤1中抽取的内部点uf和初始点ub作为前馈神经网络的输入,利用步骤
3构建的前馈神经网络进行训练。
[0014]
步骤5.根据步骤1中确定的范围进行均匀分布抽取样本点,送入训练好的前馈神经网络,通过前向传播得到预测的大气颗粒物的粒度分布演化;
[0015]
本发明的有益效果为:
[0016]
本发明将物理信息神经网络应用于颗粒群平衡方程,由于神经网络训练后的模型只需体积和时间作为输入就可得到粒度分布,故易于得到尺度谱等内容,便于后续对大气颗粒物的粒度演化过程进行分析。
[0017]
本发明经过适当的训练轮次后,其预测值和数值仿真情况下的大气颗粒物粒度分布的误差可以达到10e-4的数量级,误差小,计算速度快。
附图说明
[0018]
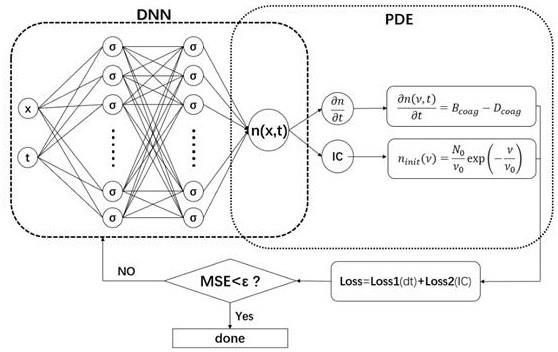
图1物理信息神经网络基本结构图;
[0019]
图2针对颗粒群方程的网络结构图;
[0020]
图3loss曲线图;
[0021]
图4根据网络预测值得到的尺度谱。
具体实施方式
[0022]
以下结合附图和实施方式对本发明作进一步的说明。
[0023]
如图1所示,该神经网络的结构包括左侧dnn为前馈神经网络,右侧pde为嵌入物理信息的损失函数,ic是初始条件,bc是边界条件,通过神经网络循环使预测值和真实值误差不断变小,直到趋于稳定,最终实现粒度分布演化的预测。
[0024]
本实施例包括以下步骤:
[0025]
步骤1.根据实际情况下大气颗粒物的粒径体积范围[ν
min
,ν
max
] 和要预测的时间长度[0,t],来确定作为样本点抽取的范围r[v,t],其中v∈[v
min
,ν
max
],t∈[0,t]。给出的实例中v∈(0,10],t∈[0,1],在此范围内利用拉丁超立方抽样的方法,分别抽取r的内部点uf和初始点即t=0时的点ub作为数据集,
[0026]
特别抽取初始点是为了提升初始边界的训练精度,此处抽取的内部点uf和ub的形式分别是:
[0027]
[[0.12441,1.34567],[3.56656,0.243265]
…
]和[[0.72343,0], [2.49234,0]
…
]。
[0028]
抽取样本的数量根据要求的范围大小进行调整,uf在本实例中抽取6000个,ub在实例中抽取500个;此处拉丁超立方抽样是一种区别于蒙特卡洛抽样方法的分层随机抽样,以确保抽样均匀且随机,提高训练后的神经网络的泛化能力;完成后得到了6500
×
2大小的数据样本。
[0029]
步骤2.对颗粒群平衡方程利用高斯积分进行离散化处理,得到离散后可在计算机中表示的离散化颗粒群平衡方程。
[0030]
颗粒群平衡方程形式如公式(1)所示,等式后第一项称为b
coag
,用高斯-勒让德求积公式处理,等式后第二项称为d
coag
,用高斯-拉盖尔积分处理:
[0031][0032]
对于b
coag
,通过变换积分限得到形式如公式(2)所示:
[0033][0034]
利用高斯-勒让德积分处理得到其离散形式如公式(3)所示:
[0035][0036]
对于d
coag
,调整函数形式得到公式(4):
[0037][0038]
利用高斯-拉盖尔积分得到其离散形式如公式(5)所示:
[0039][0040]
通过上述处理过程,最终得到离散后的形式,如公式(6)所示:
[0041][0042]
处理后选择5个积分点,以保证代数精度满足方程精度要求。
[0043]
步骤3.构建前馈神经网络,将步骤2中处理的方程作为物理信息嵌入到神经网络的损失函数中,得到需要优化的目标函数。此时的损失函数为loss=loss1+loss2,其中loss1代表的损失函数其形式如公式(7)所示:
[0044][0045]
其中mu表示内部取样点的数量,b
coag
和d
coag
项分别代表离散化颗粒群平衡方程的等式后第一项和第二项。
[0046]
loss2代表初始条件所产生的损失函数其形式如公式(8)所示:
[0047]
[0048]
其中mf表示初始边界点的数量,n(v,t)表示要求得的颗粒密度函数。
[0049]
此处并未要求方程边界条件,故只存在loss1和loss2。其结构如图2所示,其中ic表示方程的初始条件,而dt表示颗粒群方程构成的损失函数。结合adam和l-bfgs优化算法对前馈神经网络的权值和阈值进行优化;此处选择adam优化算法与l-bfgs算法相结合是基于adam相比l-bfgs在优化过程中不易陷入局部极小值,而l-bfgs 收敛的速度精度皆好于adam,所以将两者结合使用。其效果如图3 所示,可以看到训练初期使用adam优化算法训练2000轮,误差迅速下降,逐渐速度变缓,逐渐收敛,此时换用l-bfgs训练1000轮后误差进一步下降。
[0050]
步骤4.将步骤1中抽取的内部点uf和初始点ub作为前馈神经网络的输入,利用步骤3构建的前馈神经网络进行训练。此处构建的前馈神经网络是一个两输入单输出的神经网络,其输入形式是n
u+f
×
2 的张量,输出是对应的概率密度。
[0051]
此处单独介绍此网络的训练过程:
[0052]
(1)初始化网络。拟合曲线常用的激活函数是tanh激活函数,与之对应的是xavier初始化网络的权重和阈值,相比于常见的 sigmoid函数和relu函数,tanh激活函数具有与原点对称,适应输入小于0时的情况,同时曲线光滑,可以将线性网络变为非线性网络,但是存在梯度消失的问题,xavier初始化方法可以缓解tanh存在的梯度消失问题。
[0053]
(2)前向传播。将步骤1中抽取的内部点和初始点以张量的形式送入网络,通过前向传播过程即按照网络结构,数据分别与每一层的权值、阈值、激活函数等相运算,保留每个对应神经元的偏导数,利用链式法则得到同时计算出此时网络的输出,将输出和带入损失函数loss中,然后利用adam优化算法和l-bfgs优化算法记录此时的梯度。
[0054]
(3)反向传播。利用前向传播得到的梯度和设定好的学习率,此处学习率设置为0.01,进行反向传播,根据链式法则,修正每个神经元存在的权值和阈值。通过不断训练,修正权值和阈值,使得损失函数不断减小并趋于稳定,最终达到想要的精度。
[0055]
步骤5.根据步骤1中确定的体积和时间范围,按照均匀分布抽取样本点,送入训练好的前馈神经网络,通过前向传播得到要求得的大气颗粒物的粒度分布。
[0056]
如图4所示,利用本发明预测的粒度分布演化和对应解析解的粒度分布误差小,此处解析解是ramabhadran在1976年给出的,其初始条件如公式(9)所示:
[0057][0058]
解析解基本形式如公式(10)所示:
[0059][0060]
其中θ=kn0t/(2+kn0t),在这里取n0=1、v0=1、k=1。
[0061]
表1
[0062][0063]
由表1可以得到均方根误差rmse为0.0004828,平均的训练时间为279.91s。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1