基于仿真的SCR后NOx传感器信号精确度评价方法与流程
基于仿真的scr后nox传感器信号精确度评价方法
技术领域
1.本发明属于柴油发动机尾气后处理技术领域,尤其是一种基于仿真的scr后nox传感器信号精确度评价方法。
背景技术:
2.为了保证scr系统的鲁棒性,闭环控制对nox传感器信号的精度和稳定性提出了严格的要求;尤其是scr系统的后nox传感器,其信号的准确性和稳定性决定了scr系统转化效率的精度和稳定性。但是,由于车用尿素高速喷入的特性、其水解和热解过程的复杂性、混合器混合效果的差异性以及紧凑的出气端盖和排气管的影响,后nox传感器容易出现信号不准确和波动较大的问题。
3.为了防止scr系统的后nox传感器位置布置不合理导致测试nox信号失真和波动问题,必须找到一种合理的评价后nox传感器信号精确度的方法。
技术实现要素:
4.本发明的目的是在于克服现有技术中存在的不足,提供一种基于仿真的scr后nox传感器信号精确度评价方法,用于评价scr系统的后nox传感器信号的准确性。为实现以上技术目的,本发明实施例采用的技术方案是:
5.本发明实施例提供了一种基于仿真的scr后nox传感器信号精确度评价方法,包括以下步骤:
6.步骤s10,通过仿真分析软件建立仿真评价模型;
7.所述仿真评价模型包括设置在筒体内的scr催化剂,在scr催化剂下游的后端面处设置多种不同的气体组分;在后端面的下游,筒体通过锥形端盖连接排气管,在排气管靠近锥形端盖的一端设置测点并设有后nox传感器;后端面位置作为起始位置,nox传感器安装位置作为测点位置;
8.定义组分平均偏差devm和组分协同系数comix两个评价指标;
[0009][0010]
其中,ns为组分数量(个),spi为第i个组分的浓度百分比;
[0011][0012]
其中,devm
scr_out
为起始位置的组分平均偏差,devm
sensort
为测点位置的组分平均偏差;
[0013]
步骤s20,通过仿真分析,定义起始位置各气体组分的浓度百分比,以及获取测点位置各气体组分的浓度百分比;
[0014]
步骤s30,通过公式(1)计算起始位置的组分平均偏差和测点位置的组分平均偏差;
[0015]
步骤s40,通过公式(2)计算组分协同系数comix;
[0016]
步骤s50,将计算得到的组分协同系数comix与设定阈值比较,大于等于设定阈值则后nox传感器信号较为准确。
[0017]
进一步地,所述多种气体组分呈同圆心扇形分布或同圆心环形分布。
[0018]
进一步地,各气体组分的浓度百分比相同或不同。
[0019]
进一步地,所述气体组分共配置为六种,分别是no、no2、hn3、hcno、n2o、co。
[0020]
或者,所述气体组分共配置为五种,分别是nox、hn3、hcno、n2o、co。
[0021]
进一步地,当气体组分数量为6,且多种气体组分呈同圆心扇形分布时设定阈值为0.6。
[0022]
本发明实施例提供的技术方案带来的有益效果是:
[0023]
1)现有技术对scr后nox传感器信号准确性通过台架测试进行考察,无法在开发前期快速发现问题;本技术采用基于仿真的评价方法,可以通过前期的仿真计算即可判断后nox传感器信号是否准确及合理,能够在前期发现问题。
[0024]
2)根据实际情况确定仿真评价模型中引入的气体组分的分布形式,可以是扇形分布或环形分布,具体分布形式和不均匀程度均可根据实际进行调整;在不影响气流原流动性质的情况下,考察各种不均匀程度下的后nox传感器信号的准确性。
[0025]
3)可以在多种不同工况下进行评价。
附图说明
[0026]
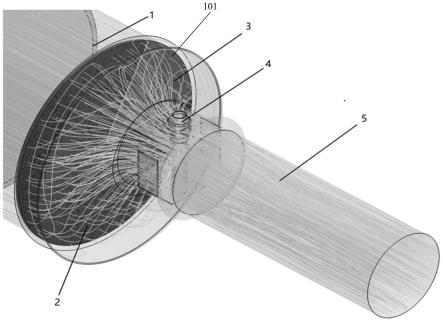
图1为本发明实施例中的仿真评价模型示意图。
[0027]
图2为本发明实施例中的六种气体组分扇形分布示意图。
[0028]
图3为本发明实施例中的五种气体组分扇形分布示意图。
具体实施方式
[0029]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0030]
实施例一,如图1所示,本发明实施例提出的一种基于仿真的scr后nox传感器信号精确度评价方法,包括以下步骤:
[0031]
步骤s10,通过仿真分析软件建立仿真评价模型;
[0032]
所述仿真评价模型包括设置在筒体内的scr催化剂1,在scr催化剂1下游的后端面101处设置多种不同的气体组分3;所述多种气体组分3呈同圆心扇形分布;在后端面101的下游,筒体通过锥形端盖2连接排气管5,在排气管5靠近锥形端盖2的一端设置测点并设有后nox传感器4;后端面101位置作为起始位置,后nox传感器4安装位置作为测点位置;
[0033]
定义组分平均偏差devm和组分协同系数comix两个评价指标;
[0034][0035]
其中,ns为组分数量(个),spi为第i个组分的浓度百分比;
[0036][0037]
其中,devm
scr_out
为起始位置的组分平均偏差,devm
sensort
为测点位置的组分平均偏差;
[0038]
由于锥形端盖2内表面也是锥形,不能存在一个平的端面,因此筒体内靠锥形端盖2的一个端面定义为后端面101;
[0039]
每种气体组分2可以配置相应的浓度百分比;各气体组分2的浓度百分比可以相同也可以不同;本实施例中各气体组分2的浓度百分比相同;
[0040]
在图2所示的实施例中,共设置六种气体组分,分别是no、no2、hn3、hcno、n2o、co;
[0041]
在图3所示的实施例中,供设置五种气体组分,分别是nox、hn3、hcno、n2o、co;在此将no和no2均视作nox;
[0042]
仿真分析软件可以采用cfd仿真分析软件;
[0043]
步骤s20,通过仿真分析,定义起始位置各气体组分的浓度百分比,以及获取测点位置各气体组分的浓度百分比;
[0044]
步骤s30,通过公式(1)计算起始位置的组分平均偏差和测点位置的组分平均偏差;
[0045]
步骤s40,通过公式(2)计算组分协同系数comix;
[0046]
步骤s50,将计算得到的组分协同系数comix与设定阈值比较,大于等于设定阈值则后nox传感器信号较为准确;
[0047]
根据应用经验,当气体组分数量为6,且多种气体组分呈同圆心扇形分布时设定阈值为0.6;如果comix≥0.6,则说明后nox传感器信号较为准确。
[0048]
在仿真分析软件中,可以配置多种发动机工况进行反复试验,例如配置四个特征工况分别为:1)高流速、高温度、高nox浓度工况,2)高流速、低温度、低nox浓度工况,3)低流速、高温度、高nox浓度工况,4)低流速、低温度、低nox浓度工况。
[0049]
实施例二,在本实施例中,所述多种气体组分3呈同圆心环形分布;其它同实施例一。
[0050]
最后所应说明的是,以上具体实施方式仅用以说明本发明的技术方案而非限制,尽管参照实例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1