信道状态信息的动作和位置的联合估计方法
1.本发明涉及一种信道状态信息的动作和位置的联合估计方法,属于深度学习领域。
背景技术:
2.近年来wifi传感器的课题研究得到了快速发展,wifi设备已被广泛用作人类感知任务的传感器,如室内定位、动作识别、呼吸检测等。由于无线技术成本低廉、分布广泛,并且研究表明人类的行为对周围无线信号的影响可以作为一种传感工具,用于无线定位和识别无线网络附近人员的动作。因此利用无线传感技术对周围环境进行感知吸引了许多学者的研究与探索,显示出了巨大的发展潜力以及广阔的应用前景。
3.先前的许多工作表明相比于接收信号强度信息,信道状态信息已经成为一种很常用的测量信息。在基于csi的无线定位任务中,许多传统的方法采用rssi作为位置指纹信息,然后由于rssi容易受到周围环境的干扰,及其不稳定,所以对定位的精度有一定的影响。csi相对于rssi信号比较稳定。此外,传统的机器学习方法需要人为手动的提取特征送入分类器,这就要求对提取的特征能很好的反映位置信息,这有一定的实现复杂性。然而相对于传统的经验方法,卷积神经网络技术可以提供更广泛的潜在预测变量和更丰富的功能形式规格。卷积神经网络无需手动提取特征,通过卷积层可自动提取,这大大增加了数据预测的灵活性。
4.在动作识别的任务中,先前的许多工作都基于计算机视觉,通过监控摄像头观察被测人的动作,然而这极大的侵犯了被测人的隐私。而基于csi的动作识别是一项新型技术,它可以在不使用专用设备的情况下通过分析一个人对周围无线信号的影响来判断他的状态,因此该项技术引起了广泛关注。
5.随着物联网技术发展,人机交互程序应运而生。定位和动作识别任务需要同时满足,这在智能家庭中应用尤为广泛。因此本发明提出了一种基于深度学习的联合动作和位置估计的算法框架。这两个过程是以并行方式独立设计。
6.有鉴于此,确有必要提出一种信道状态信息的动作和位置的联合估计方法,以解决上述问题。
技术实现要素:
7.本发明的目的在于提供一种信道状态信息的动作和位置的联合估计方法,通过分布式训练策略来加快模型训练时间。
8.为实现上述目的,本发明提供了一种信道状态信息的动作和位置的联合估计方法,主要包括以下步骤:
9.步骤1、设置多个接收端并分别测量csi信号,提取csi信号的幅值信息;
10.步骤2、通过hampel滤波和gauss滤波进行数据预处理,去除csi信号的异常值并平滑去噪;
11.步骤3、构建多个训练样本矩阵并通过图像渲染技术转成rgb图像;
12.步骤4、将rgb图像通过cnn网络在多个gpu上进行分布式训练,得到多个位置估计模型和多个动作识别模型;
13.步骤5、在多个接收端分别测量csi信号,提取csi信号的幅值信息;
14.步骤6、通过hampel滤波和gauss滤波进行数据预处理,去除csi信号的异常值并平滑去噪;
15.步骤7、构建多个测试样本矩阵并通过图像渲染技术转成rgb图像;
16.步骤8、将步骤7得到的rgb图像分别输入到多个位置估计模型和多个动作识别模型中,分别得到多个位置估计预测结果和多个动作识别预测结果,将多个位置估计预测结果通过决策融合得到位置估计最终预测结果,将多个动作识别预测结果通过决策融合得到动作识别最终预测结果。
17.作为本发明的进一步改进,包括离线阶段和在线阶段,其中步骤1-步骤4在离线阶段完成,步骤5-步骤8在在线阶段完成。
18.作为本发明的进一步改进,步骤1具体包括以下步骤:
19.步骤11、在发射端和接收端分别设置3根发射天线和3根接收天线,在5ghz频段下采集csi信号;
20.步骤12、选择15个位置作为位置估计的参考点,以及在每个位置下设置6个不同的动作作为动作识别的参考动作,接收端的采样频率为200hz,即每秒接收200个csi信号数据包,每个位置的每个动作下分别采集10s。
21.作为本发明的进一步改进,步骤2具体包括以下步骤:
22.步骤21、通过hampel滤波器滤除csi信号的尖锐异常值;
23.步骤22、通过guass滤波器对csi信号进行平滑去噪处理。
24.作为本发明的进一步改进,步骤3具体包括以下步骤:
25.步骤31、构建多个训练样本矩阵;
26.步骤32、使用(0-1)归一化消除奇异样本数据;
27.步骤33、利用jet函数将归一化后的训练样本矩阵渲染成rgb图片,渲染过后的rgb图片的尺寸为30*30。
28.作为本发明的进一步改进,步骤31具体包括以下步骤:
29.步骤311、采用单天线收发csi信号,在不同位置的同一个动作下都采集2000个csi信号数据包作为一个csi.dat文件;
30.步骤312、对每个csi信号数据包的30个csi子载波提取幅度得到一个1*30的矩阵形式的csi幅度数据,每30个数据包的数据构成一个样本矩阵,样本矩阵的大小为30*30。
31.作为本发明的进一步改进,步骤4具体包括以下步骤:
32.步骤41、将训练样本矩阵分成多个batch,通过cnn网络进行模型训练;
33.步骤42、在多个gpu上分别保留一份模型的副本,每个batch在不同的gpu上分别训练;
34.步骤43、利用梯度同步技术对每个gpu上的loss进行参数更新。
35.作为本发明的进一步改进,步骤41中,cnn网络的第i层特征矩阵s(i,j)为
[0036][0037]
其中,x为卷积神经网络的输入,n为输入矩阵的个数以及张量的最后一维的维数,xk代表第k个输入矩阵,wk代表卷积核的第k个子卷积核矩阵,s(i,j)代表卷积核w对应的输出矩阵的对应位置元素的值,b表示第i层的偏移量矩阵。
[0038]
作为本发明的进一步改进,所述梯度同步技术采用同步sgd算法:
[0039][0040]
其中,d代表一个样本集合,θ表示所有参数的集合,φ表示学习率,loss(x,y)表示所有loss的平均值。
[0041]
作为本发明的进一步改进,步骤8具体包括以下步骤:
[0042]
步骤81、分别计算多个位置估计模型和动作识别模型在softmax层的输出;
[0043]
步骤82、通过网格搜索法选取不同的权重w对不同的位置估计模型和动作识别模型的softmax的输出进行加权融合,得到位置估计最终预测结果和动作识别最终预测结果。
[0044]
本发明的有益效果是:本发明过分布式训练加快训练速度和模型收敛速度,通过决策融合的方式将不同的位置估计模型和动作识别模型的输出结果加权融合,大大提高了位置和动作识别的分类效果。
附图说明
[0045]
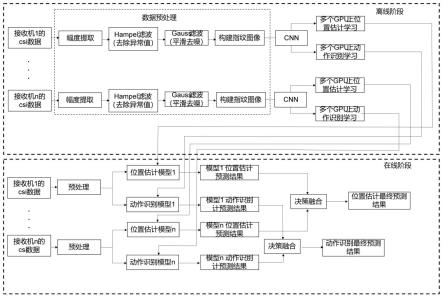
图1为本发明信道状态信息的动作和位置的联合估计方法的流程示意图。
[0046]
图2为本发明信道状态信息的动作和位置的联合估计方法中所使用的卷积神经网络的结构示意图。
[0047]
图3为本发明信道状态信息的动作和位置的联合估计方法采用的分布式训练的流程图。
[0048]
图4为本发明信道状态信息的动作和位置的联合估计方法中在线阶段采用的决策融合的示意图。
具体实施方式
[0049]
为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
[0050]
在此,需要说明的是,为了避免因不必要的细节而模糊了本发明,在附图中仅仅示出了与本发明的方案密切相关的结构和/或处理步骤,而省略了与本发明关系不大的其他细节。
[0051]
另外,还需要说明的是,术语“包括”、“包含”或者任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0052]
如图1至图4所示,本发明所提出了一种基于深度学习的信道状态信息的动作和位置的联合估计方法,主要包括以下步骤:
[0053]
步骤1、设置多个接收端并分别测量csi信号,提取csi信号的幅值信息;
[0054]
步骤2、通过hampel滤波和gauss滤波进行数据预处理,去除csi信号的异常值并平滑去噪;
[0055]
步骤3、构建多个训练样本矩阵并通过图像渲染技术转成rgb图像;
[0056]
步骤4、将rgb图像通过cnn网络在多个gpu上进行分布式训练,得到多个位置估计模型和多个动作识别模型;
[0057]
步骤5、在多个接收端分别测量csi信号,提取csi信号的幅值信息;
[0058]
步骤6、通过hampel滤波和gauss滤波进行数据预处理,去除csi信号的异常值并平滑去噪;
[0059]
步骤7、构建多个测试样本矩阵并通过图像渲染技术转成rgb图像;
[0060]
步骤8、将步骤7得到的rgb图像分别输入到多个位置估计模型和多个动作识别模型中,分别得到多个位置估计预测结果和多个动作识别预测结果,将多个位置估计预测结果通过决策融合得到位置估计最终预测结果,将多个动作识别预测结果通过决策融合得到动作识别最终预测结果。
[0061]
本发明主要包括两个阶段,分别为离线阶段和在线阶段,其中,上述步骤1-步骤4在离线阶段完成,步骤5-步骤8在在线阶段完成,以下将对步骤1-步骤8进行详细说明。
[0062]
步骤1具体包括以下步骤:
[0063]
步骤11、在发射端和接收端分别设置3根发射天线和3根接收天线,在5ghz频段下采集csi信号;
[0064]
步骤12、选择15个位置作为位置估计的参考点,以及在每个位置下设置6个不同的动作作为动作识别的参考动作,接收端的采样频率为200hz,即每秒接收200个csi信号数据包,每个位置的每个动作下分别采集10s。
[0065]
步骤2具体包括以下步骤:
[0066]
步骤21、通过hampel滤波器滤除csi信号的尖锐异常值;
[0067]
步骤22、通过guass滤波器对csi信号进行平滑去噪处理。
[0068]
步骤3具体包括以下步骤:
[0069]
步骤31、构建多个训练样本矩阵;
[0070]
步骤311、采用单天线收发csi信号,在不同位置的同一个动作下都采集2000个csi信号数据包作为一个csi.dat文件;
[0071]
步骤312、对每个csi信号数据包的30个csi子载波提取幅度得到一个1*30的矩阵形式的csi幅度数据,每30个数据包的数据构成一个样本矩阵,样本矩阵的大小为30*30;
[0072]
步骤32、使用(0-1)归一化消除奇异样本数据;
[0073]
步骤33、利用jet函数将归一化后的训练样本矩阵渲染成rgb图片,渲染过后的rgb图片的尺寸为30*30。
[0074]
步骤4具体包括以下步骤:
[0075]
步骤41、将训练样本矩阵分成多个batch,通过数据加载进行模型训练;
[0076]
步骤42、在多个gpu上分别保留一份模型的副本,每个batch在不同的gpu上分别训练;
[0077]
步骤43、利用梯度同步技术对每个gpu上的loss进行参数更新。
[0078]
图2描述了本专利具体实现所采用的卷积神经网络的结构。cnn是一种广泛使用的
深度学习技术,具有出色的图像识别性能。cnn和普通的神经网络具有许多相似之处,它们都是模仿人类神经的结构,由具有可学习的权重和偏置常数的神经元组成。每一个神经元可以接收输入信号,经过运算后输出每一个分类的分数。但是,cnn的输入一般是图像,卷积网络进行卷积池化,成功将数据量多的图像不断降维,最终使其能够被训练。cnn的特征是由一个或多个卷积层和池化层组成。cnn具有三个独特的概念:本地过滤器,最大池和权重共享。cnn中主要有三种层,即卷积层,池化层和完全连接层。
[0079]
假设训练集一张图片x为卷积神经网络的输入,s(i,j)代表卷积核w对应的输出矩阵的对应位置元素的值,s(i,j)可以表示为如下公式:
[0080][0081]
其中,n为输入矩阵的个数以及张量的最后一维的维数,xk代表第k个输入矩阵,wk代表卷积核的第k个子卷积核矩阵,b表示第i层的偏移量矩阵。
[0082]
卷积神经网络进行卷积层操作之后,然后进入池化层,池化层用于对卷积层计算得到的特征图进行下采样操作,降低网络模型的复杂度,对急剧变化的特征图进行均衡化操作。经过多次卷积和采样操作,最后利用卷积神经网络的全连接层生成一维特征向量,方便后续处理。
[0083]
整个卷积池化过程中经常使用的激活函数relu函数,relu激活函数:
[0084][0085]
relu激活函数是分段线性函数,属于单侧抑制函数。它使神经元具有了稀疏激活性;卷积训练过程容易产生过拟合,容易产生简单的模型,需要在全连接层后添加dropout层。
[0086]
训练样本的输入的图像是彩色图像,输入的图片数据形式为3
×
30
×
30,经过第一次卷积之后数据变为16
×
30
×
30的形式,经过第一次池化,数据变为16
×
16
×
15的形式;经过第二次卷积之后数据变为32
×
13
×
13的形式,经过第二次池化,数据变为32
×6×
6的形式;经过第三次卷积之后数据变为64
×
64
×
6的形式,经过第三次池化,数据变为64
×
64
×
3的形式;经过第一个全连接层连接,然后输出576个特征,经过第二个全连接层连接,输出288个特征,最后再经过第三个全连接层,输出72个特征,最终经过softmax层输出最终的分类结果。
[0087]
图3描述了本专利采用的分布式训练的流程图。分布式训练就是将数据进行并行处理,在不同的gpu上训练模型,通过修改sampler切分输入,每张卡只需要处理一部分数据;各个gpu独立进行前向计算,反向计算。在反向传播过程中,通过梯度同步来更新各张卡上的参数。为了实现梯度同步,在分布式训练过程中常用的有同步sgd算法。标准的sgd公式入下:
[0088][0089]
其中,d代表一个样本集合,θ表示所有参数的集合,φ表示学习率,loss(x,y)表示所有loss的平均值。通过把样本集合拆解如下:
[0090][0091]
把标准sgd公式进行拆分我们可以得到:
[0092][0093]
由于梯度操作是分布式的,所以我们可以得到:
[0094][0095]
由于每张卡都是独立计算,最终得到的loss值等于每张卡loss相加而不会有任何丢失因此分布式训练可以加速模型收敛,加快训练速度,而不会对训练精度产生什么影响。
[0096]
步骤8具体包括以下步骤:
[0097]
步骤81、分别计算多个位置估计模型和动作识别模型在softmax层的输出;
[0098]
步骤82、通过网格搜索法选取不同的权重w对不同的位置估计模型和动作识别模型的softmax的输出进行加权融合,得到位置估计最终预测结果和动作识别最终预测结果。
[0099]
图4为本专利中在线阶段采用的决策融合的示意图,决策融合可以充分利用多个接收机的数据信息。在线阶段提高最终的位置估计和动作识别分类正确率。
[0100]
综上所述,本发明提出的基于分布式学习和决策融合的csi动作和位置联合估计方法。离线阶段选择csi幅度指纹构建rgb图像作为训练样本输入卷积神经网络,显著的提升了位置估计和动作识别的准确率。此外本发明在无需使用专用设备的情况下,通过研究人的行为对周围无线信号的影响来判断他的状态,该项技术拥有巨大的发展前景和广阔的应用前景。
[0101]
同时,在离线阶段,采用分布式训练策略加快训练速度和加速模型收敛。在线阶段,通过决策融合的方式充分利用多个接收机的数据信息。将不同位置估计和动作识别模型的输出结果加权融合得到最终的分类效果。大大的提高了位置和动作识别的分类效果。
[0102]
此外,本发明还为csi位置和动作识别的相关研究和应用提供了一种全新的思路,为同领域内的其他相关问题提供了参考,可以以此为依据进行拓展延伸和深入研究,具有十分广阔的应用前景。
[0103]
以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1