一种无人天车调度方法与流程
1.本发明涉及无人天车技术领域,具体为一种无人天车调度方法。
背景技术:
2.目前传统天车控制主要依赖人工的方式,该方式需要大量人工参与,人力成本提高,且随着人工长时间工作,容易出现疲劳、不规范操作等现象,严重时甚至导致安全事故的发生,为此我们提出一种无人天车调度方法用于解决上述问题。
技术实现要素:
3.本发明的目的在于提供一种无人天车调度方法,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种无人天车调度方法,包括如下步骤:
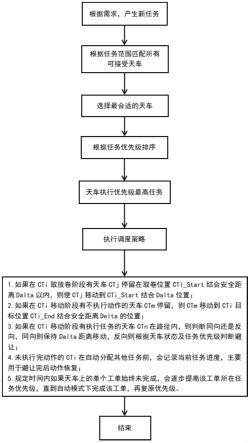
5.s1、根据需求,产生一个新的任务;
6.s2、根据任务执行范围匹配所有可接受该任务的天车;
7.s3、从所有匹配的天车中选择最合适的天车;
8.s4、根据任务优先级排序;
9.s5、天车执行优先级最高的任务;
10.s6、按照任务天车执行动作,采用调度策略调度近邻天车动作。
11.优选的,所述s1中的任务为一个集合,按照实际情况可细分为多个工单。
12.优选的,所述s2中的执行范围指任务的开始区域到结束区域,同时依附于库区长度,每台天车匹配有对应的作业范围。
13.优选的,所述s6中的动作包括:取卷移动、取卷下降、夹钳闭合、取卷上升、放卷移动、放卷下降、夹钳打开、放卷上升。
14.优选的,所述s6中的调度策略包括如下步骤:
15.步骤一、天车cti执行动作期间,判断路径上是否会与其他天车执行动作产生交集;
16.步骤二、如果在cti取卷阶段有天车ctj停留在取卷位置cti_start安全距离dalta以内,则使ctj移动到cti_start结合dalta位置;
17.步骤三、如果在cti移动阶段有不执行动作的天车ctm停留,则ctm移动到cti目标位置cti_end结合安全距离delta的位置;
18.步骤四、如果在cti移动阶段有执行任务的天车ctn在路径内,则判断同向还是反向,同向则保持dalta距离移动,反向则根据天车状态及任务优先级判断避让;
19.步骤五、未执行完动作的cti在自动分配其他任务前,会记录当前任务进度,主要用于避让完后动作恢复。
20.优选的,所述调度策略的方法中规定时间内如果天车上的单个工单始终未完成,
会提高该工单所在任务优先级,直至自动模式下完成该工单,再重新复原任务优先级。
21.与现有技术相比,本发明的有益效果是:
22.1、本发明提出方法可取代天车司机,节约了人工成本;
23.2、本发明提出方法通过调度策略,避免天车长时间空闲,提高作业效率;
24.3、本发明提出方法通过安全距离,避免天车间距离过近,产生危险,提高安全性;
25.4、本发明提出方法通过界面控制,实现远程监控库区无人天车运行状况。
附图说明
26.图1为本发明流程图。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.实施例1
29.参照图1,为本发明第一个实施例,该实施例提供了一种无人天车调度方法,包括如下步骤:
30.s1、按需求生成任务,任务按详情细分为数个工单,每个工单对应每个钢卷,每台天车对应各自作业区域,各天车作业区域边缘存在交集;
31.s2、根据天车执行动作,可划分为:取卷阶段、移动阶段、放卷阶段;取卷阶段为:天车到达取卷位置,包括取卷下降、夹钳闭合、取卷上升;放卷阶段为:天车到达放卷位置,包括放卷下降、夹钳打开、放卷上升;移动阶段为:从天车当前位置到达取放卷位置的动作,包括取卷移动和放卷移动;
32.s3、根据任务类型和作业范围匹配所有可执行任务的天车,再根据工单信息,匹配空闲天车,给天车cti下发该工单;
33.s4、天车cti接单后生成取卷位置坐标cti_start、安全距离dalta、放卷位置坐标cti_end,并根据任务优先级排序;
34.s5、天车cti选择执行优先级最高的任务:
35.s6、天车cti进入执行动作阶段:
36.cti取放卷阶段:自动生成缓冲区,缓冲区大小为cti_start
±
dalta,若缓冲区内有空闲天车ctj,ctj自动执行避让工单到缓冲区边缘;
37.cti移动阶段:如果有不执行任务的天车ctm在[cti_start
±
dalta,cti_end
±
dalta]范围内,自动下发避让工单,使ctm移动到范围边缘;
[0038]
如果有执行任务的天车ctn在[cti_start
±
dalta,cti_end
±
dalta]范围内,若ctn与cti移动方向同向,则保持不小于dalta的安全距离移动,当某一台天车优先到达取放卷位置,则按照cti取放卷阶段中的规则执行;如ctn与cti移动方向反向,按天车状态及任务优先级判定避让,天车状态为未取卷的或任务优先级低的进行避让动作;
[0039]
未执行完动作的天车会记录之前执行的动作,待完成避让后,重新分配该工单进
行动作;
[0040]
当工单下发后,默认开始记录该工单运行时间,规定时间内未完成,将重新分配该工单,调整该工单所在任务的优先级直至该工单在自动模式下完成后恢复该任务优先级。
[0041]
实施例2
[0042]
参照图1,为本发明第二个实施例,该实施例基于上一个实施例,具体的,生成的任务为一个集合,按照实际情况可细分为多个工单,每个工单对应每个钢卷。
[0043]
具体的,执行范围指任务的开始区域到结束区域,同时依附于库区长度,每台天车匹配有对应的作业范围,各天车作业区域边缘存在交集。
[0044]
具体的,执行动作可分为:取卷移动、取卷下降、夹钳闭合、取卷上升、放卷移动、放卷下降、夹钳打开、放卷上升,不同的动作,对应天车对钢卷不同的操作。
[0045]
具体的,调度策略包括如下步骤:
[0046]
步骤一、天车cti执行动作期间,判断路径上是否会与其他天车执行动作产生交集;
[0047]
步骤二、如果在cti取卷阶段有天车ctj停留在取卷位置cti_start安全距离dalta以内,则使ctj移动到cti_start结合dalta位置;
[0048]
步骤三、如果在cti移动阶段有不执行动作的天车ctm停留,则ctm移动到cti目标位置cti_end结合安全距离delta的位置;
[0049]
步骤四、如果在cti移动阶段有执行任务的天车ctn在路径内,则判断同向还是反向,同向则保持dalta距离移动,反向则根据天车状态及任务优先级判断避让;
[0050]
步骤五、未执行完动作的cti在自动分配其他任务前,会记录当前任务进度,主要用于避让完后动作恢复。
[0051]
上述调度策略的方法中规定时间内如果天车上的单个工单始终未完成,会提高该工单所在任务优先级,直至自动模式下完成该工单,再重新复原任务优先级。
[0052]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1