巡检机器人视觉SLAM算法
巡检机器人视觉slam算法
技术领域
1.本发明涉及一种巡检机器人视觉slam算法。
背景技术:
2.在巡检机器人实际所处的工作环境中,烟雾的浓度是未知的,因此若采用基于大气散射模型的快速去雾算法,则需要人工根据实际情况不断调整去雾参数,否则将会出现图像失真严重或去雾效果不理想的情况,这将影响后续的视觉slam算法的定位追踪过程,导致系统鲁棒性降低。为解决该问题,实现去雾参数的自适应调整,针对巡检机器人的实际工作环境及视觉slam算法的需求,提出了一种应用于视觉slam的自适应图像去雾算法。
技术实现要素:
3.为了解决上述问题,本发明提供一种巡检机器人视觉slam算法。
4.一种巡检机器人视觉slam算法,它包括如下步骤:
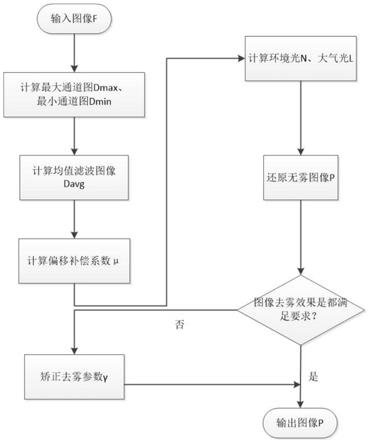
5.第一步,输入图像f;
6.第二步,计算最大通道图dmax、最小通道图dmin;
7.第三步,计算偏移补偿系数u;
8.第四步,计算环境光n和大气光l;
9.第五步,还原无雾图像p;
10.第六步,判断图像去雾效果是都润足要求
11.第七步,若满足要求,则输出输出图像p,若不满足,则矫正去雾参数y。
12.进一步的,第六步判断去雾图像p满足以下条件:
[0013][0014]
本发明的有益效果:
[0015]
本发明提出了一种适用于视觉slam的自适应图像去雾算法。可以提高机器人视觉slam算法在面对未知雾浓度环境时的定位及追踪性能,且算法可以检测无雾环境,在无雾环境下休眠以节约计算资源。针对巡检机器人所面对的未知环境,提出一种自适应图像去雾算法;在去雾算法的基础上,对orbslam2视觉slam算法进行改进。
附图说明
[0016]
图1为本发明流程图;
[0017]
图2为本发明的自适应去雾算法流程图。
[0018]
图3为本发明改进slam算法基本框架。
具体实施方式
[0019]
下面结合附图1-3对本发明做详细介绍:
[0020]
针对巡检机器人实际所面对的未知雾环境,对基于大气散射模型的图像去雾算法进行改进,提出一种应用于orbslam2的自适应图像去雾算法,与传统图像去雾算法进行对比仿真,证明所提出算法在面对未知雾浓度环境时具有更好的去雾效果,最后使用所提出的自适应去雾图像算法对orbslam2算法进行改进,实验结果表明改进的orbslam2在有烟雾遮挡环境下具有更好的鲁棒性。
[0021]
一种巡检机器人视觉slam算法,它包括如下步骤:
[0022]
第一步,输入图像f;
[0023]
第二步,计算最大通道图dmax、最小通道图dmin;
[0024]
第三步,计算偏移补偿系数u;
[0025]
第四步,计算环境光n和大气光l;
[0026]
第五步,还原无雾图像p;
[0027]
第六步,判断图像去雾效果是都润足要求
[0028]
第七步,若满足要求,则输出输出图像p,若不满足,则矫正去雾参数y。
[0029]
进一步的,第六步判断去雾图像p满足以下条件:
[0030][0031]
具体的,本发明实施例如下:
[0032]
在图像去雾领域,暗通道先验去雾算法、直方图均衡化算法、retinex增强算法等经典算法被广泛使用,近年来,张登银等也有对暗通道先验去雾算法进行了优化,提高了算法的运算速度。何立风等提出了一种快速图像去雾算法,将算法运行时间缩短了50%,但上述算法面对雾浓度不同的图像时,仍存在需手动调整去雾参数的问题。将传统图像去雾算法进行比较,如表3.1所示:
[0033]
表3.1现有图像去雾算法比较
[0034][0035]
由表3.1可知,在去雾效果满足要求的情况下,快速去雾算法具有计算量小、计算速度快的优势。考虑到机器人所采用的控制器计算能力有限,因此,对巡检机器人来说,使用快速去雾算法进行图像处理更为合适。
[0036]
在巡检机器人实际所处的工作环境中,烟雾的浓度是未知的,因此若采用基于大气散射模型的快速去雾算法,则需要人工根据实际情况不断调整去雾参数否则将会出现图像失真严重或去雾效果不理想的情况,这将影响后续的视觉slam算法的定位追踪过程,导致系统鲁棒性降低。为解决该问题,实现去雾参数的自适应调整,本项目对图像去雾效果的表示方式、去雾效果与去雾参数的关系特征及去雾参数的自适应调整算法展开研究,并基于大气散射模型的快速去雾算法进行改进,针对巡检机器人的实际工作环境及视觉slam算法的需求,提出了一种应用于视觉slam的自适应图像去雾算法。
[0037]
自适应图像去雾算法针对相机所采集的图像是连续视频的形式,在对所采集视频当前帧的图像进行去雾处理后,对图像的去雾效果进行评价,根据去雾效果的好坏调整去雾参数,然后使用调整的参数继续对下一帧图像进行处理,如此每完成当前帧的图像的处理就对去雾参数y进行一次校正,便可保证去雾算法在未知雾浓度环境下的去雾效果,算法的流程图如图1所示。
[0038]
要实现所提出的自适应去雾算法,则需要先确定合适的图像的去雾效果评价指标对去雾图像的去雾效果进行评判。因此,首先对图片的去雾评价指标进行研究。
[0039]
假设整张图像的介质透射率为1-d/l0,即公式(1)满足如下条件:
[0040][0041]
则根据公式(1)可知去雾算法计算出的去雾图像p满足以下条件:
[0042][0043]
由于d为f中的最小值通道,因此依据公式(2)可知在所计算出的去雾图像p中,介质透射率满足公式(1)的像素点处,p在该像素点处中的三通道之中必有一通道的值为0,即该像素点的三通道之一在进行去雾计算时受到阻塞,下文为方便描述将该类像素点称为阻塞点。该类点的去雾程度较深,易导致图像出现失真现象。因此,整幅去雾图像中阻塞点占比越高,则表示图像去雾程度以及图像失真程度越高。
[0044]
在整幅图像中,阻塞点占比β的计算公式如下:
[0045][0046]
式中,z为阻塞点数目,n为图像像素点总数。
[0047]
为证明阻塞点占比与去雾程度的相关性,使用基于大气散射模型的图像去雾算法,设置了不同去雾参数γ对收集到的100张含雾图像进行了去雾处理。分析实验可得阻塞点占比可以作为表示图像去雾程度的指标。
[0048]
使用阻塞点占比作为图像去雾效果评价指标的自适应去雾算法的流程图如图2。
[0049]
为验证所提出自适应去雾算法相较于传统去雾算法具有更好的去雾效果,将使用he算法、快速去雾算法与本项目的算法进行图像去雾对比仿真。并且使用该算法模拟环境雾浓度突变的情况进行去雾参数校正实验以验证算法在校正去雾参数时的效率。
[0050]
基于应用于视觉slam的自适应图像去雾算法研究,为了提高视觉slam算法在巡检火灾现场等有烟雾遮挡环境下的鲁棒性,将orbslam2系统和图像去雾算法进行融合。融合方式为将图像去雾算法作为orbslam2的图像处理前端,巡检机器人相机所读取到的图像需要先通过图像处理前端进行去雾增强,得到具备更多特征点等信息的去雾图像,然后再输入orbslam2中进行定位及建图的工作,这样,即便在有一定烟雾遮挡的环境下,巡检机器人的视觉slam系统仍可以保持其建图及定位工作的正常进行。
[0051]
orbslam2是一种经典的视觉slam算法,前文中也进行了简单介绍,算法主要经过以下流程:相机数据采集、视觉里程计、后端图优化、回环检测及建图定位,本节将该算法与图像去雾算法进行结合,在算法的相机数据采集环节,对所采集到的图像进行去雾增强,改
进后的slam系统框架图如图3所示,验证融合自适应去雾算法的orbslam2系统在烟雾环境中具备更好的鲁棒性。
[0052]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1