一种基于RFID技术的整车自动盘点系统与方法与流程
一种基于rfid技术的整车自动盘点系统与方法
技术领域
1.本发明公开了一种基于rfid技术的整车自动盘点系统与方法,属于整车仓储管理技术领域。
背景技术:
2.汽车主机厂完成产线生产后,按物流计划进行商品车运输及存放。发往各4s销售门店前,主要在各大商品车基地库进行存放,并由物流公司及承接仓储的运营商对商品车资产进行管控或担责。为保障商品车资产、避免资产缺漏,且资产金额较大,对资产的盘点管控须尤为重视。
3.当前库内盘点以人工纸质点检为主,需要耗费大量人力成本,盘点精准度受人为主观影响大,且盘点成果不易保存;部分库区采用半自动化盘点,利用手持盘点设备结合平台系统,由工作人员进行挨个扫描识别,在一定程度上优化了作业操作。以上旧有的盘点模式,无法摆脱人工成本消耗及人为因素对盘点精确度的影响,无法达到全自动化盘点的目的。
技术实现要素:
4.本发明的目的在于解决现有的盘点模式无法摆脱人工成本消耗及人为因素对盘点精确度影响的问题,提出一种基于rfid技术的整车自动盘点系统与方法。
5.本发明所要解决的问题是由以下技术方案实现的:
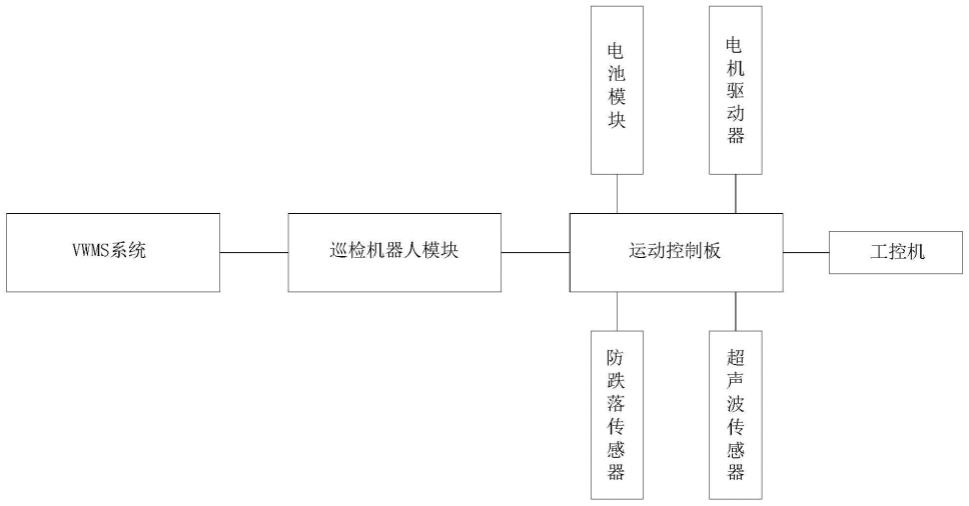
6.一种基于rfid技术的整车自动盘点系统,包括分别与rfid盘点模块通讯连接的巡检机器人模块和vwms系统,所述巡检机器人模块包括与运动控制板电性连接的工控机、防跌落传感器、超声波传感器、电池模块和电机驱动器,所述工控机分别与惯性测量单元和gps模块。
7.优选的是,所述电机驱动器包括:左电机驱动器和右电机驱动器。
8.一种基于rfid技术的整车自动盘点方法,包括:
9.所述运动控制板根据预先获取的路径地图分别向左电机驱动器和右电机驱动器分别发送左电机运行指令和右电机运行指令;
10.所述左电机驱动器和右电机驱动器分别接到左电机运行指令和右电机运行指令领执行相应操作;
11.所述运动控制板根据惯性测量单元和gps模块通过工控机发送的物体三轴姿态角、加速度数据和gps数据与路径地图进行比较并判断是否一致;
12.所述vwms系统根据rfid盘点模块发送的该库位信息及所停放的商品车信息并通过后台进行信息绑定判断每个库位及其对应的实际所停放商品车信息输出巡检结果表。
13.优选的是,还包括:
14.所述运动控制板根据防跌落传感器和超声波传感器发出的相应数据控制分别向左电机驱动器和右电机驱动器分别发送通过绕行或停止运行的方式进行避让;
15.所述运动控制板根据rfid盘点模块发送的异常情况时分别向左电机驱动器和右电机驱动器分别发送停止运行指令。
16.本发明相对于现有而言具有的有益效果:
17.本发明公开了一种基于rfid技术的整车自动盘点系统与方法,通过集成rfid读写设备,与rfid标签结合,可精准识别目标物,包括目标商品车及目标库位,通过集成防跌落传感器和超声波传感器实现对周边障碍物的识别,有效达成避障功能,通过集成惯性测量单元和gps模块精准获取坐标位置,为路径导航提供有效支撑;通过设备内部工控写入定制化程序,实现识别数据的精准绑定,展示目标商品车和目标库位的对应情况;实现基于库区平面图、自身坐标位置及障碍物识别的自主寻径功能。
附图说明
18.图1是本发明的电气连接示意图。
具体实施方式
19.以下根据附图1对本发明做进一步说明:
20.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
22.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
23.如图1所示,本发明第一实施例在现有技术的基础上提供了一种基于rfid技术的整车自动盘点系统,包括分别与rfid盘点模块通讯连接的巡检机器人模块和vwms系统,巡检机器人模块包括与运动控制板电性连接的工控机、防跌落传感器、超声波传感器、电池模块和电机驱动器,工控机分别与惯性测量单元和gps模块,电机驱动器包括:左电机驱动器和右电机驱动器。
24.本发明第二实施例在现有技术的基础上提供了一种基于rfid技术的整车自动盘点方法,包括:
25.运动控制板根据预先获取的路径地图分别向左电机驱动器和右电机驱动器分别发送左电机运行指令和右电机运行指令;
26.左电机驱动器和右电机驱动器分别接到左电机运行指令和右电机运行指令领执行相应操作;
27.运动控制板根据惯性测量单元和gps模块通过工控机发送的物体三轴姿态角、加
速度数据和gps数据与路径地图进行比较并判断是否一致;
28.vwms系统根据rfid盘点模块发送的该库位信息及所停放的商品车信息并通过后台进行信息绑定判断每个库位及其对应的实际所停放商品车信息输出巡检结果表。
29.运动控制板根据防跌落传感器和超声波传感器发出的相应数据控制分别向左电机驱动器和右电机驱动器分别发送通过绕行或停止运行的方式进行避让;
30.运动控制板根据rfid盘点模块发送的异常情况时分别向左电机驱动器和右电机驱动器分别发送停止运行指令。
31.运动控制板包括有:处理器和存储器。
32.处理器可以包括一个或多个处理核心,比如4核心处理器、8核心处理器等。处理器可以采用dsp(digital signal processing,数字信号处理)、fpga(field-programmable gate array,现场可编程门阵列)、pla(programmable logic array,可编程逻辑阵列)中的至少一种硬件形式来实现。处理器也可以包括主处理器和协处理器,主处理器是用于对在唤醒状态下的数据进行处理的处理器,也称cpu(central processing unit,中央处理器);协处理器是用于对在待机状态下的数据进行处理的低功耗处理器。在一些实施例中,处理器可以在集成有gpu(graphics processing unit,图像处理器),gpu用于负责显示屏所需要显示的内容的渲染和绘制。一些实施例中,处理器还可以包括ai(artificial intelligence,人工智能)处理器,该ai处理器用于处理有关机器学习的计算操作。
33.存储器可以包括一个或多个计算机可读存储介质,该计算机可读存储介质可以是有形的和非暂态的。存储器还可包括高速随机存取存储器,以及非易失性存储器,比如一个或多个磁盘存储设备、闪存存储设备。在一些实施例中,存储器中的非暂态的计算机可读存储介质用于存储至少一个指令,该至少一个指令用于被处理器所执行以实现本技术中提供的一种基于rfid技术的整车自动盘点方法。
34.在一些实施例中,终端还可选包括有:外围设备接口403和至少一个外围设备。具体地,外围设备包括:射频电路、触摸显示屏、摄像头、音频电路、定位组件和电源中的至少一种。
35.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用。它完全可以被适用于各种适合本发明的领域。对于熟悉本领域的人员而言,可容易地实现另外的修改。因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1