一种光栅干涉仪中非线性误差的补偿方法
一种光栅干涉仪中非线性误差的补偿方法
(一)技术领域
1.本发明涉及光电信号处理领域,涉及一种光栅干涉仪中非线性误差的补偿方法。
(二)
背景技术:
2.精密测量系统在很多领域都有广泛的需求,其中外差干涉测量被认为是最精确的位移测量方法之一。在外差干涉测量方法中,外差光栅干涉仪具有高分辨力、高稳定性的特点。光学器件的性能不理想造成的周期性非线性误差是外差光栅干涉仪测量误差的一个主要来源。
3.由于激光器和光学器件的不完全理想,双频激光两不同频率线偏振光的非正交、双频激光坐标系和偏振分光镜的坐标系不重合、偏振分光镜的对不同偏振态的激光分离不理想等原因都会造成非线性误差。除此之外,在外差干涉测量系统中,光学器件表面的不完全透射引起的鬼影反射会造成与理想干涉信号成整数倍的非线性误差。
4.光栅干涉仪中运动台运动时的相位信号表达式如式(1)所示表示:
5.其中pe为带有误差信号的相位信息,pi为不带有非线性误差的理想相位信号,e
e1
和e
e2
为分别为一阶非线性误差和二阶非线性误差,k1、k2分别为一阶非线性误差与二阶非线性误差的幅值,δf为光栅干涉仪所用的双频激光的频率差,n1、n2为相位信号频率与非线性误差信号频率的比值,为分别为一阶非线性误差和二阶非线性误差与理想相位信号的相位差。在外差干涉测量系统中,当入光栅的入射角发生变化且光栅与读数头即存在垂直相对运动也存在平行相对运动时,会造成鬼影反射产生的非线性误差频率与理想相位信号频率的比值n1、n2不为整数。
6.因此,提出了一种光栅干涉仪的非线性误差的定量分析方法,可有效抑制运动台运动时相位的非线性误差,提高光栅干涉仪的测量精度。
(三)
技术实现要素:
7.光栅干涉仪中由于光学器件性能不是完全理想的而导致非线性误差与相位的变化有固定的频率关系,当相位变化的频率产生变化时,非线性误差的频率也会发生变化,其非线性误差频率是理想相位信号频率的三倍左右。所以一般的带通、带阻滤波器无法准确的消除非线性误差。本发明的主要目的在于提供了一种基于互相关系数的非线性误差分离与补偿方法,降低和补偿光栅干涉仪的非线性误差。
8.本发明的目的是这样实现的:
9.与激光干涉仪不同,由于鬼影反射造成的非线性误差的频率与理想项的频率不再成整数倍的关系,这对非线性误差的分离与补偿造成了一定困难。在使用傅里叶变换确定各频率变量间关系时,由于采样时间内运动台的速度并非理想的匀速,导致各频率分量对
应的峰是有一定宽度的,很难使用傅里叶变换来确定鬼影反射分量与理想分量间的倍数关系。
10.所以,提出一种光栅干涉仪中非线性误差的补偿方法来定量分析高阶误差的频率。
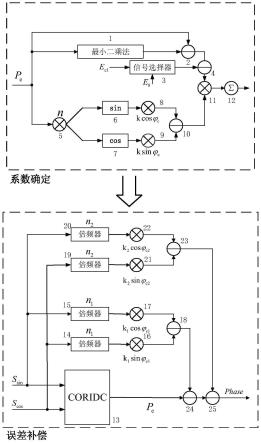
11.首先控制运动台匀速运动,采集带有非线性误差的相位信号pe进入系数确定步骤,使用最小二乘法1得到拟合曲线,将带有非线性误差的相位信号pe与最小二乘法1得到的拟合曲线直接的差值作为非线性误差。由于非线性误差的频率与相位变化的频率有固定关系,所以可以使用相位信号通过倍频、调幅和调相等操作构造出与非线性误差类似的信号来抑制非线性误差。为了确定倍频、调幅和调相的参数,使带有非线性误差的相位信号pe通过乘法器5进行倍频后,分别进行正弦运算6和余弦运算7,再分别通过乘法器8和9乘以调幅系数和调相系数再相减后,得到初步构造的非线性误差。调幅系数k可以通过傅里叶变换确定。此时信号选择器3使恒为零的信号e0通过信号选择器在减法器4处与非线性误差信号相减,与初步构造出的误差通过乘法器11相乘后通过求和器12对一段时间的信号求和。求和得到的数值即为初步构造误差与非线性误差间的互相关系数。以n和作为自变量,互相关系数作为因变量,对互相关系数求最大值。互相关系数最大时代表构造的误差与非线性误差最为相似。当互相关系数为最大值时,对应的n和值即为一阶构造误差e
c1
的倍频系数n
1m
和的值。求出e
c1
后,信号选择器使e
c1
通过,与非线性误差通过减法器4相减,形成补偿一阶误差后的残余误差。残余误差再次与倍频n倍调相调幅后的构造误差在乘法器11处相乘后通过求和器12求和,得到残余误差与构造误差的互相关系数。此时再次以n和作为自变量,互相关系数作为因变量,对互相关系数求最大值。此时当互相关系数为最大值时,对应的n和值即为二阶构造误差e
c2
的倍频系数n
2max
和的值。
12.在光栅干涉仪的相位求解过程中,通过一对正交的信号s
sin
和s
cos
通过cordic算法进行反正切运算得到带有非线性误差的相位信号pe。s
sin
和s
cos
同时通过倍频器14、15、19和20,分别倍频n1、n2倍,再在乘法器16、17、21和22分别调幅k1、k2和调相再通过减法器18和23相减得到一阶构造误差e
c1
和二阶构造误差e
c2
。带有非线性误差的相位信号pe与一阶构造误差e
c1
和二阶构造误差e
c2
通过减法器24和25相减得到补偿后的相位信号。
13.通过这种方式完成系数确定后,可以用将光栅干涉仪输出的带有误差的相位信号pe减去构造的一阶误差e
c1
和二阶误差e
c2
的方法抑制光栅干涉仪中的非线性误差。
(四)附图说明
14.图1是一种光栅干涉仪中非线性误差的补偿方法。由最小二乘法1、减法器2、4、10、18、23、24和25、信号选择器3、乘法器5、8、9、11、16、17、21和22、正弦计算6、余弦计算7、求和器12、cordic算法13、倍频器14、15、19和20组成。
15.图2是一种光栅干涉仪中非线性误差的数字补偿及其参数确定方法的实施例。
16.图3是n、和构造误差与非线性误差互相关系数的函数图。
17.图4是运动台5mm/s速度运动时的非线性误差和构造误差图。
18.图5是光栅干涉仪相位补偿前后的非线性误差。
(五)具体实施方式
19.下面结合具体的实施例来进一步阐述本发明。
20.图2给出了一种光栅干涉仪中非线性误差的数字补偿及其参数确定方法的实施例。它由最小二乘法1、减法器2、4、10、18、23、24和25、信号选择器3、乘法器5、8、9、11、16、17、21和22、正弦计算6、余弦计算7、求和器12、cordic算法13、倍频器14、15、19和20组成光栅干涉测量系统、系数确定、误差补偿三部分。所述方法的光栅干涉测量系统中,由运动台匀速运动产生位移信号,光栅干涉仪采集运动台匀速运动时的相位信号pe后进去系数确定部分。所述方法的系数确定部分中,带有非线性误差的相位信号pe通过最小二乘法1对相位进行二阶曲线拟合,再通过减法器2与带有非线性误差的相位信号pe相减得到非线性误差信号。信号选择器3选择一路信号通过并与误差信号通过减法器4得到残余误差。同时带有误差的相位信号通过乘法器5与倍频系数相乘后分别通过正弦计算6和余弦计算7,再通过乘法器8和9与调相、调幅系数相乘后通过减法器10相减得到构造误差。构造误差与残余误差通过乘法器11相乘后通过求和器12对一段时间的结果求和得到构造误差与残余误差的互相关系数,互相关系数的大小反映了两者的相似程度,此时如图3所示,当互相关系数到达最大值时,表示此时的构造误差和非线性误差之间最相似,由此得到调相、调幅系数,其运动台5mm/s速度运动时的非线性误差和构造误差如图4所示。所述方法中误差补偿部分中,带有相位信息的正交信号通过cordic算法13进行反正切运算得到带有误差的相位信号。带有相位信息的正交信号通过倍频器14、15倍频n1倍和乘法器16、17乘以调相、调幅系数后通过减法器18相减形成一阶构造误差信号。带有相位信息的正交信号通过倍频器19、20倍频n2倍和乘法器21、22乘以调相、调幅系数后通过减法器23相减形成二阶构造误差信号。带有误差的相位信号通过减法器24和25分别与一阶构造误差和二阶构造误差相减,得到补偿后的相位信号。
21.补偿前非线性误差与补偿后非线性误差图如图5所示,补偿效果明显。本发明方法对光栅干涉仪中的非线性误差有较好的补偿效果,有效提高光栅干涉仪的测量精度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1