一种基于物联网的生态环境监测系统的制作方法
1.本发明涉及生态环境监测领域,具体涉及一种基于物联网的生态环境监测系统。
背景技术:
2.环境监测,是指环境监测机构对环境质量状况进行监视和测定的活动,以确定环境污染状况和环境质量的高低,其内容主要包括物理指标的监测、化学指标的监测和生态系统的监测。
3.目前,在生态环境监测系统的研究中,多依赖搭建检测基站实现,传感器的安装固定需要花费大量的时间,费时费力,同时传感器位置的确定多依赖人为经验,一定程度上降低了监测结果的精确度,且很容易发生传感器布置完成后,通讯网络不稳定,需要反复的人为调整的情况;当传感器发生故障时,又需要花费大量的时间去寻找传感器,同时,传感器的回收查找也是一个繁琐且费力的过程。
技术实现要素:
4.为解决上述问题,本发明提供了一种基于物联网的生态环境监测系统,在可以实现生态环境较为全面的监测的同时,提高了监测结果的精确度,且操作方便,灵活性高。
5.为实现上述目的,本发明采取的技术方案为:一种基于物联网的生态环境监测系统,包括:传感器组,通过自锁式尼龙扎带按生态环境监测需求安装在监测锚杆、树干、树枝、各种支架等载体上;无人机巡检模块,用于通过无人机实现当前监测区绿植翻盖率、垃圾分布情况等的巡检;数据采集终端,按一定的阀值布置在当前监测区内,用于实现传感器组、无人机巡检模块数据的采集;云服务器,用于实现各数据采集站所反馈的数据的整理、计算和储存,并生成对应的生态环境监测报告;手机app,用于实现所述生态环境监测报告的查看,传感器组工况、无人机工况的查看和调控等。
6.进一步地,每一个传感器均配置一底部中心处带螺纹连接杆的外壳,通过螺纹与自锁式尼龙扎带的扎带头相连。
7.进一步地,监测锚杆包括锚杆本体以及按一定阀值与锚杆本体焊接的用于安装传感器的u型框。
8.进一步地,还包括:传感器引导布置模块,用于通过无人机辅助实现传感器组的布置。
9.进一步地,传感器引导布置模块内载:传感器布置图生成模块,用于根据当前监测区的卫星图获取当前区域内的河流、
绿植、支架等载体所在的地理位置信息,以满足当前区域生态环境监测需求,且各传感器之间形成的通讯网络信号稳定为约束条件,以监测锚杆用量最少、传感器用量相对较少为目标实现传感器种类的选择以及所在位置的规划,生成传感器布置图;引导路线生成模块,用于根据所述传感器布置图生成无人机引导路线,当无人机到达对应的载体时,以多簇红外激光束同时投放,一一对应不同传感器布置点的方式引导用户完成传感器的定位。
10.进一步地,所述无人机巡检模块用于通过无人机巡检的模式实现当前监测区图像的采集,基于dssd_ xception_coco 模型实现当前监测区图像内载绿植、垃圾的检测识别,从而获取到当前监测区绿植翻盖率、垃圾分布情况。
11.进一步地,以稳定实现整个监测区域内传感器所采集到的数据采集为约束条件,数据采集终端数量最少为目标实现数据采集终端布置方案的规划。
12.进一步地,还包括:传感器工况接入模块,用于接入传感器工况数据至数据采集终端,并实时反馈至云服务器,当发现落入预设的故障阀值时,云服务器发送对应的预警提醒至手机app,同时生成对应的无人机引导路线,在用户发起传感器维修请求时,引导用户查找到存在故障的传感器。
13.本发明具有以下有益效果:1)通过无人机引导进行传感器的布置和回收,同时配合自锁式尼龙扎带、锚杆的设计,大大方便了系统的搭建和维护,灵活性高;2)以满足当前区域生态环境监测需求,且各传感器之间形成的通讯网络信号稳定为约束条件,以监测锚杆用量最少、传感器用量相对较少为目标实现传感器种类的选择以及所在位置的规划,可以保证在系统搭建完成后,即可获取到稳定的通讯网络;3)传感器组、无人机的协同配合,可以更加全面的实现生态环境的监测。
附图说明
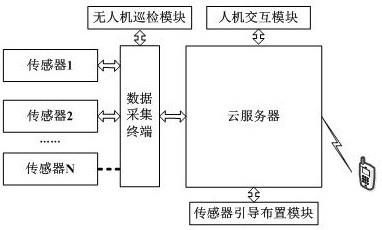
14.图1为本发明实施例一种基于物联网的生态环境监测系统的系统框图。
15.图2为本发明实施例中自锁式尼龙扎带的结构示意图。
16.图3为本发明实施例中监测锚杆的结构示意图。
具体实施方式
17.为了使本发明的目的及优点更加清楚明白,以下结合实施例对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
18.如图1-图3所示,本发明实施例提供了一种基于物联网的生态环境监测系统,包括:人机交互模块,用于录入生态监测区域的地理位置信息、监测要求、监测时间等数据;传感器引导布置模块,用于通过无人机辅助实现传感器组的布置,内载传感器布置图生成模块和引导路线生成模块;所述的传感器布置图生成模块根据当前监测区的卫星
图获取当前区域内的河流、绿植、支架等载体所在的地理位置信息,以满足当前区域生态环境监测需求,且各传感器之间形成的通讯网络信号稳定为约束条件,以监测锚杆用量最少、传感器用量相对较少为目标实现传感器种类的选择以及所在位置的规划,生成传感器布置图;所述的引导路线生成模块根据所述传感器布置图生成无人机引导路线,当无人机到达对应的载体时,以多簇红外激光束同时投放,一一对应不同传感器布置点的方式引导用户完成传感器的定位;传感器组,通过自锁式尼龙扎带按生态环境监测需求安装在监测锚杆、树干、树枝、各种支架等载体上,用于实现空气质量参数、水质参数等的采集;无人机巡检模块,用于通过无人机实现当前监测区绿植翻盖率、垃圾分布情况等的巡检;具体地,通过无人机巡检的模式实现当前监测区图像的采集,基于dssd_ xception_coco 模型实现当前监测区图像内载绿植、垃圾的检测识别,从而获取到当前监测区绿植翻盖率、垃圾分布情况。
19.数据采集终端,按一定的阀值布置在当前监测区内,用于实现传感器组、无人机巡检模块数据的采集;以稳定实现整个监测区域内传感器所采集到的数据采集为约束条件,数据采集终端数量最少为目标实现数据采集终端布置方案的规划;云服务器,用于实现各数据采集站所反馈的数据的整理、计算和储存,并生成对应的生态环境监测报告;手机app,用于实现所述生态环境监测报告的查看,传感器组工况、无人机工况的查看和调控等;传感器工况接入模块,用于接入传感器工况数据至数据采集终端,并实时反馈至云服务器,当发现落入预设的故障阀值时,云服务器发送对应的预警提醒至手机app。
20.如图2所示,每一个传感器均配置一底部中心处带螺纹连接杆的外壳,通过螺纹与自锁式尼龙扎带1的扎带头2相连,自锁式尼龙扎带的扎带头2上开设有螺纹孔。
21.如图3所示,监测锚杆包括锚杆本体3以及按一定阀值与锚杆本体焊接的用于安装传感器的u型框4。
22.本实施例中,dssd_ xception_coco 模型采用dssd目标检测算法,用coco数据集预训练inception v3深度神经网络,然后用先前准备好的数据集训练该模型,微调深度神经网络中的各项参数,最后得到合适的用于检测绿植、垃圾的目标检测模型。
23.本实施例中,所述手机app,内设:手机app,用于,传感器组工况、无人机工况的查看和调控等;数据查看模块,用于实现所述生态环境监测报告、传感器组工况、无人机工况的查看;调控模块,用于在权限内实现传感器组工况、无人机工况的调控;数据分析模块,用于根据监测到的数据绘制各种曲线图,并通过不同函数对绘制曲线进行回归计算;仿真分析模块,用于通过simulink搭建相关生态环境仿真分析模型对所监测到的数据进行仿真分析。
24.本具体实施工作时,首先,通过无人机辅助实现传感器组的布置,首先,根据当前监测区的卫星图获取当前区域内的河流、绿植、支架等载体所在的地理位置信息,以满足当
前区域生态环境监测需求,且各传感器之间形成的通讯网络信号稳定为约束条件,以监测锚杆用量最少、传感器用量相对较少为目标实现传感器种类的选择以及所在位置的规划,生成传感器布置图;然后基于引导路线生成模块根据所述传感器布置图生成无人机引导路线,当无人机到达对应的载体时,以多簇红外激光束同时投放,一一对应不同传感器布置点的方式引导用户完成传感器的定位,用户通过自锁式尼龙扎将对应的传感器安装在监测锚杆、树干、树枝、各种支架等载体上,安装完后;以稳定实现整个监测区域内传感器所采集到的数据采集为约束条件,数据采集终端数量最少为目标实现数据采集终端布置方案的规划,完成数据采集终端的布置,布置完成后,唤醒传感器组和数据采集终端,实现空气质量参数、水质参数等的采集;同时,通过无人机巡检模块,实现当前监测区绿植翻盖率、垃圾分布情况等的巡检;具体地,通过无人机巡检的模式实现当前监测区图像的采集,基于dssd_ xception_coco 模型实现当前监测区图像内载绿植、垃圾的检测识别,从而获取到当前监测区绿植翻盖率、垃圾分布情况。最后,基于云服务器实现各数据采集站所反馈的数据的整理、计算和储存,并生成对应的生态环境监测报告。用户通过手机app注册登录后,可以通过访问云服务器实现所述生态环境监测报告的查看,传感器组工况、无人机工况的查看和调控,还可以根据需要实现目标数据的获取。
25.以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1