一种基于行动轨迹预测的危险区域的安全监控方法与流程
本技术涉及工程和试验中危险区域的安全监督监控领域,尤其涉及一种基于行动轨迹预测的危险区域的安全监控方法。
背景技术:
1、在工程施工和试验检测过程中,人员的安全是重中之重,需要优先进行考虑。通常情况下,为了保证安全,会在施工或试验开始之前,划定危险区域,并确定安全警戒线,通过明确的标识提醒和警示人员切勿误闯危险区域,避免危险情况的发生。但是在实际工程和试验过程中,即使放置了清晰明确的标识,依旧无法杜绝一些不了解情况的人员误闯入危险区域,给施工和试验带来了极大的安全隐患。因此,在保留明确标识的前提下,需要展开对于危险区域的进一步监督监控。
2、现有的危险区域监督监控方法主要有以下几种方式:人工现场监控方法、视频监控方法和红外电子栅栏方法。
3、人工现场监控方法主要通过派遣人力在危险区域四周或出入口进行监管,观察并及时劝阻可能会误闯危险区域的人员,以消除安全隐患。此方式能够有效的实现危险区域的监督监控,并且能够在人员误闯危险区之前及时阻止危险情况的发生,具有一定的预判性。但是此方式对于一些面积较大的危险区域存在人力需求量大,对于监督人员的注意力和耐力具有较高的要求,不利于工程或试验的长期开展。
4、视频监控方式主要通过在危险区域各个方位安装监控摄像头,通过少量人员即可在视频监控室内进行观察和安全监督监控,当发现人员误闯趋势时,即可依靠广播和警报的方式进行劝阻。此方式虽然能够大大的减少人力的需求,但是对于监控人员的注意力和耐力依旧是一大考验,无法长期开展工作。
5、红外电子栅栏法主要是利用红外信号通断状态切换的方式进行监督监控。在危险区域警戒线两侧分别安放红外信号发生器和接收器,发生器持续发出红外信号以供接收器接收。当无人员跨过警戒线时,接收器接收信号连续,电子栅栏正常工作不报警;而当出现人员跨越警戒线时,接收器接收信号发生中断,电子栅栏发出警报声,并发出信号指示中止施工或试验。此方式无需人力看守,实现了安全监控在一定程度上的自动化。但是此方式仅能在人员越过警戒线,出现安全隐患后再进行报警和中止施工或试验,无法做到对误闯人员的提前感知和劝阻;对于一些特殊的工程或试验,如长时间老化试验等,突然的中止将导致试验的失败,造成一定程度的损失。
技术实现思路
1、本技术提供一种基于行动轨迹预测的危险区域的安全监控方法,能够解决目前危险区域人工现场监控方法和视频监控方式所存在的人力成本大、对于监督员注意力和耐压要求高、无法长期开展工作,以及电子栅栏法无法对误闯人员进行提前预判和劝阻等问题。
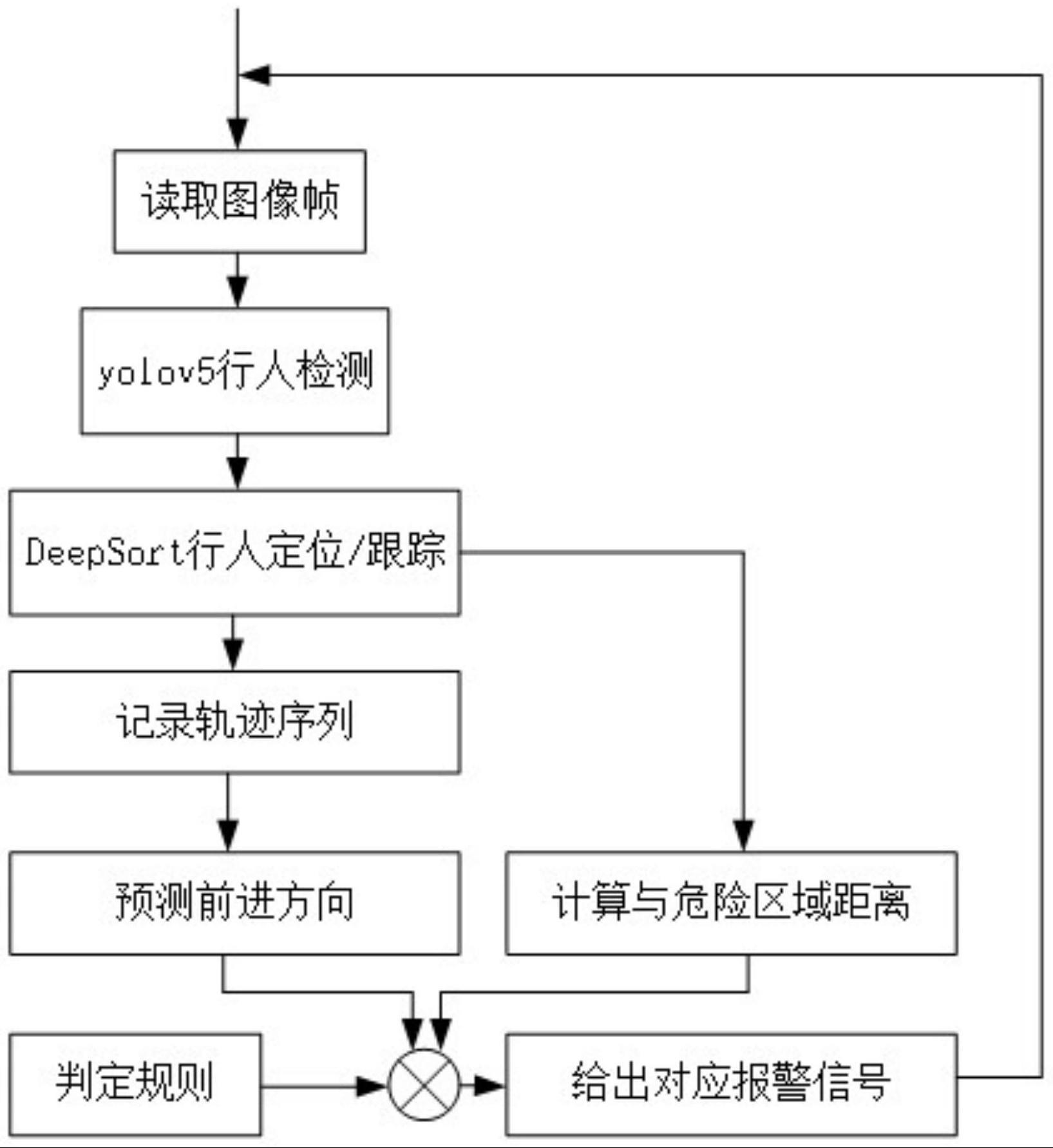
2、本技术的实施例提供了一种基于行动轨迹预测的危险区域的安全监控方法,包括以下步骤:在危险区域处布置摄像头和报警装置,并使得摄像头的视野范围完全覆盖危险区域。读取摄像头的图像。将图像中的区域划分为危险区、警戒区和安全区,危险区为危险区域在图像中所占据的区域,警戒区为位于危险区域的外围的预设区域在图像中所占据的区域,安全区为图像中除了危险区和警戒区以外的所有区域,并确定危险区、警戒区和安全区的坐标范围。利用yolov5算法实现对图像中的行人的检测。利用deep sort算法实现图像中的行人的定位和轨迹跟踪,并获取行人在图像中的位置坐标。记录行人在预设时长内的每一帧图像中的位置坐标,并形成行人在图像中的轨迹序列。根据轨迹序列以及利用最小二乘法求取直线坐标函数,并作为预测前进函数,预测前进函数的斜率为行人在图像中的预测前进方向。通过计算行人的预测前进函数与危险区的边缘线函数的交点,计算行人在预测前进方向上与危险区之间的预测前进距离。根据行人的位置坐标、预测前进方向和预测前进距离,控制报警装置的工作。
3、在其中一些实施例中,记录行人在预设时长内的每一帧图像中的位置坐标的过程中,记录行人的检测结果外框的底部中心的位置坐标。
4、在其中一些实施例中,根据轨迹序列以及利用最小二乘法求取直线坐标函数的过程中,利用最小二乘法进行参数拟合的函数选择一次直线方程,一次直线方程的表达式为:y=kx+b,并通过轨迹序列中的位置坐标对表达式中的k和b进行拟合。
5、在其中一些实施例中,若行人的位置坐标在警戒区的坐标范围外,则控制报警装置不发出报警信号。
6、在其中一些实施例中,若行人的位置坐标在警戒区的坐标范围内,并在危险区的坐标范围外,且预测前进方向为远离或平行于危险区时,控制报警装置不发出报警信号。
7、在其中一些实施例中,若行人的位置坐标在警戒区的坐标范围内,并在危险区的坐标范围外,且预测前进方向为靠近危险区时,控制报警装置发出第一报警信号。
8、在其中一些实施例中,控制报警装置发出第一报警信号时,对行人进行劝阻提示。
9、在其中一些实施例中,若控制报警装置发出第一报警信号后,预测前进方向仍为靠近危险区,则控制第一报警信号的频率加快。
10、在其中一些实施例中,控制第一报警信号的频率加快的过程中,控制第一报警信号的频率随着预测前进距离的逐步减少而逐步加快。
11、在其中一些实施例中,若行人的位置坐标在危险区的坐标范围内,则控制报警装置发出第二报警信号。
12、在其中一些实施例中,控制报警装置发出第二报警信号时,对行人进行劝阻提示的同时,对危险区域内的施工或试验进行急停操作。
13、在其中一些实施例中,报警装置布置在危险区域的边缘线处。
14、根据本技术实施例提供的一种基于行动轨迹预测的危险区域的安全监控方法,包括以下步骤:在危险区域处布置摄像头和报警装置,并使得摄像头的视野范围完全覆盖危险区域。读取摄像头的图像。将图像中的区域划分为危险区、警戒区和安全区,危险区为危险区域在图像中所占据的区域,警戒区为位于危险区域的外围的预设区域在图像中所占据的区域,安全区为图像中除了危险区和警戒区以外的所有区域,并确定危险区、警戒区和安全区的坐标范围。利用yolov5算法实现对图像中的行人的检测。利用deep sort算法实现图像中的行人的定位和轨迹跟踪,并获取行人在图像中的位置坐标。记录行人在预设时长内的每一帧图像中的位置坐标,并形成行人在图像中的轨迹序列。根据轨迹序列以及利用最小二乘法求取直线坐标函数,并作为预测前进函数,预测前进函数的斜率为行人在图像中的预测前进方向。通过计算行人的预测前进函数与危险区的边缘线函数的交点,计算行人在预测前进方向上与危险区之间的预测前进距离。根据行人的位置坐标、预测前进方向和预测前进距离,控制报警装置的工作。本技术的监控过程中无需人力成本,行人的识别、行动轨迹的预测和距离的测量均由与摄像头和报警装置连接的上位机的软件系统完成,可实现对危险区域的长时间监控,解决了目前危险区域人工现场监控方法和视频监控方式所存在的人力成本大、对于监督员注意力和耐压要求高、无法长期开展工作,以及电子栅栏法无法对误闯人员进行提前预判和劝阻等问题。另外,本技术能够对于误闯人员的行动轨迹进行预测,在人员误闯进入危险区域之前进行预判和劝阻,在一定程度上避免了因工程或试验意外中止而造成的损失。此外,本技术仅需布置监控摄像头和报警装置即可实现,亦可利用已有监控设备内嵌软件实现,实施简单,硬件要求低。
- 还没有人留言评论。精彩留言会获得点赞!