一种基于Bayes-Bootstrap法的通航飞机维修周期确定方法
一种基于bayes-bootstrap法的通航飞机维修周期确定方法
技术领域
1.本发明涉及飞机维修数据处理领域,尤其涉及一种基于bayes-bootstrap法的通航飞机维修周期确定方法。
背景技术:
2.飞机在服役过程中难免存在超限飞行和其它偶发因素(如重着陆等)引起的过载现象,这种过载会使机身、机翼、安定面等机体形面产生一定程度的永久变形。随着该型飞机使用时间增加,这种永久变形会累积并逐渐增大,当变形量超过一定值后,必然会显著影响飞机的飞行性能和操纵性能,严重时会危及飞行安全。当前中国通用航空维修活动依据的法规主要为ccar91《一般运行和飞行规则》及ccar43《一般维修和改装规则》。ccar91部对小型飞机仅要求需执行100小时检查或年度检查,或者采用渐进式维修,没有要求小型活塞飞机制定维修方案。而小型活塞飞机主要为20世纪六七年代设计的产品,维修思想还停留在定时维修,所以依据厂家维修计划编制的维修方案缺乏经济性,维修工作量大,维修管理困难,对方案的控制管理缺乏可靠性维修思想要求的动态特性。目前一些较为先进的维修管理方法会根据飞机的服役时长调整维修周期。但仅靠飞机服役时长来确定飞机维修周期并不够灵活,没有做到与实际情况充分结合,无法科学、客观地制定损伤修复方案以平衡机群可靠性和维修的人力物力消耗之间的关系。为此,提出一种适用于小批量小型民航飞机机群的维修周期确定方法。
技术实现要素:
3.为了解决现有的通航飞机维修周期确定存在的上述问题,减少飞机维修不及时所造成的隐患的同时降低大规模维修所耗费的人力物力,本发明提供了一种基于bayes-bootstrap法的通航飞机维修周期确定方法。
4.本发明为实现上述目的所采用的技术方案是:基于bayes-bootstrap法的通航飞机维修周期确定方法,包括以下步骤:
5.s1:测量每架飞机的水平测量要素的特征参数,在固定坐标系中测量飞机关键位置的坐标点,根据数字化水平测量计算出每架飞机的水平测量要素的特征参数;
6.s2:利用步骤s1测量得到的所述特征参数构建样本数据集,对样本数据进行正态分布检验,计算得到样本均值μ和标准差σ,根据拉伊达准则剔除粗大误差得到各个参数的有效样本点集x(x1,x2,
…
,xn);
7.s3:根据bayes-bootstrap法和步骤s2有效样本数据量确定增广数据量n,创建含有n个数据点的集合其中单个增广样本点概率为定值
8.s4:根据步骤s2得到的正态分布样本均值μ、标准差σ和步骤s3得到的单个增广数据点概率,确定虚拟增广所依据的概率密度函数f(x);
9.s5:根据步骤s4中的概率密度函数f(x)和单个增广样本点概率构建首对增广点的
增广公式,计算和并将数据点存入所述增光样本点集合xz中;
10.s6:引入参数ai、bi,以概率密度函数f(x)为被积函数,令ai为积分下限、单个数据增广点概率为积分值,构建增广迭代公式,反求积分上限bi,根据ai、bi和所述步骤s2中的样本均值μ计算出增广样本点然后更新a
i+1
=bi;
11.s7:重复步骤s6次,得到含有n个样本点的增广样本点集并与步骤s2的所述样本集x融合获得扩充后用于bayes-bootstrap法的数据点集
12.s8:采用bayes-bootstrap法计算出样本点集的样本均值估计样本标准差估计从而计算出样本均值在置信度1-α=0.95的情况下的置信区间(μ
l
,μu);
13.s9:计算出飞机水平测量要素的各个特征参数样本的95%置信区间(μ
il
,μ
iu
)超出该特征参数的失效预警区间(τ
i1
,τ
i2
)的比率ρi,然后按权值法计算出预警失效率ρ;
14.s10:综合飞机服役年限以及所述预警失效率ρ,通过查询飞机失效曲线表确定飞机下次维修时间。
15.优选的,步骤s1中的所述飞机关键位置的坐标点包括:机身测量数据点、机翼测量数据点、垂直尾翼安定面测量数据点和水平尾翼安定面测量数据点。
16.优选的,步骤s2中的拉伊达准则其有效区间为(μ-3σ,μ+3σ)。
17.优选的,步骤s3中的增广数据量n≥10,且n为偶数。
18.优选的,步骤s4中的增广依据的概率密度函数f(x)计算公式如下:
[0019][0020]
其中,σ和μ为步骤s2中正态分布检验得到样本均值μ和标准差σ。
[0021]
优选的,步骤s5中的和计算公式如下:
[0022][0023]
式中dt为积分对象,t为无量纲参数。
[0024]
优选的,步骤s6中的bi的计算公式:
[0025][0026]
其中,ai为已知迭代参数;
[0027][0028]
计算公式如下:
[0029][0030]
其中,
[0031]
优选的,步骤s8中的bayes-bootstrap法需先构造一个服从dirichlet分布的权值wi,wi=u
i-u
i-1
,其中ui为区间(0,1)的均匀分布的随机数;
[0032]
样本均值估计样本标准差估计计算公式如下:
[0033][0034]
其中,为数据点集中随机抽取的数据;
[0035]
置信区间计算公式如下:
[0036][0037]
其中,μu为置信区间上限,μ
l
为置信区间下限,为正态分布的分位点,可由查表得,n为数据点集xb中的样本总数。
[0038]
优选的,步骤s9中预警失效率ρ的计算公式如下:
[0039][0040]
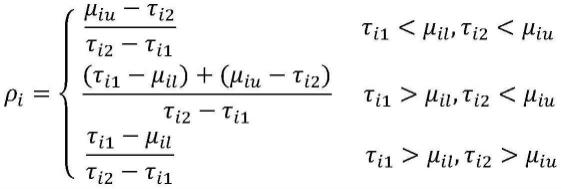
式中ρi为对应参数的失效预警率,计算公式如下:
[0041][0042]
其中,τ
i1
为对应参数的失效预警区间下限,τ
i2
对应参数的失效预警区间上限;
[0043]
所述权值vi为某一机型的m种水平测量要素对飞机综合预警失效率的影响的体现,且
[0044][0045]
其中,vi为对应参数的失效权值。
[0046]
优选的,步骤s10中的飞机平均飞行时间以1000h为一个长度区间进行区分。
[0047]
优选的,s10步骤中的飞机下次维修时间根据查表所得周期剩余时间及当前日期共同确定。
[0048]
本发明的一种基于bayes-bootstrap法的通航飞机维修周期确定方法,适用与通航飞机的维修周期动态评估,且能够减少飞机维修不及时所造成的隐患的同时降低大规模维修所耗费的人力物力。
附图说明
[0049]
图1是本发明实施例的基于bayes-bootstrap法的通航飞机维修周期确定方法流程图;
[0050]
图2是本发明实施例的用于bayes-bootstrap法的右侧机翼上反角虚拟增广样本数据概率分布图;
[0051]
图3是本发明实施例的飞机综合预警失效率-维修周期剩余时间表。
具体实施方式
[0052]
下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
[0053]
实施例1
[0054]
如图1所示,本发明的一种基于bayes-bootstrap法的通航飞机维修周期确定方法,包括以下步骤:
[0055]
s1:测量每架飞机的水平测量要素的特征参数,在固定坐标系中测量飞机关键位置的坐标点,根据数字化水平测量计算出每架飞机的水平测量要素的特征参数;
[0056]
其中,飞机关键位置的坐标点包括:机身测量数据点、机翼测量数据点、垂直尾翼安定面测量数据点和水平尾翼安定面测量数据点。其中,水平测量数据点的位置为:a点,机身舱门前隔框处的左舱门铰链下部固定螺钉头中心;b点,机身舱门前隔框处的右舱门铰链下部固定螺钉头中心点;c点,机身fs228.68站位处左侧从上至下算起,第1颗铆钉头中心点;d点,机身fs228.68站位处右侧从上至下算起,第1颗铆钉头中心点;u点,机身舱门后隔框处左门闩上部固定螺钉头中心点;v点,机身舱门后隔框处右门闩上部固定螺钉头中心点;e点,左机翼ws208.00站位处翼肋与前梁下表面的铆钉头中心点;f点,右机翼ws208.00站位处翼肋与前梁下表面的铆钉头中心点;g点,左机翼ws208.00站位处翼肋与后梁下表面的铆钉头中心点;h点,右机翼ws208.00站位处翼肋与后梁下表面的铆钉头中心点;i点,左机翼ws100.00站位处前缘翼肋与前梁下表面的铆钉头中心点;j点,右机翼ws100.00站位处前缘翼肋与前梁下表面的铆钉头中心点;k点,左机翼ws100.00站位处后缘翼肋与后梁下表面的铆钉头中心点;l点,右机翼ws100.00站位处后缘翼肋与后梁下表面的铆钉头中心点;m点,水平尾翼左前梁上表面与左外侧翼肋的铆钉头中心点;n点,水平尾翼右前梁上表面与右外侧翼肋的铆钉头中心点;q点,水平尾翼左后梁上表面与左外侧翼肋的铆钉头中心点;r点,水平尾翼右后梁上表面与右外侧翼肋的铆钉头中心点;s点,垂直尾翼左侧前梁上部铆钉头中心点;t点,垂直尾翼左侧后梁上部铆钉头中心点;s`点,垂直尾翼右侧前梁上部铆钉头中心点;t`点,垂直尾翼右侧后梁上部铆钉头中心点;
[0057]
s2:利用步骤s1测量得到的所述特征参数构建样本数据集,对样本数据进行正态分布检验,计算得到样本均值μ和标准差σ,根据拉伊达准则剔除粗大误差得到各个参数的有效样本点集x(x1,x2,
…
,xn);
[0058]
其中,拉伊达准则其有效区间为(μ-3σ,μ+3σ);
[0059]
s3:根据bayes-bootstrap法和步骤s2有效样本数据量确定增广数据量n,创建含有n个数据点的集合其中单个增广样本点概率为定值
[0060]
其中,增广数据量n≥10,且n为偶数;
[0061]
s4:根据步骤s2得到的正态分布样本均值μ、标准差σ和步骤s3得到的单个增广数据点概率,确定虚拟增广所依据的概率密度函数f(x);
[0062]
增广依据的概率密度函数f(x)表达式如下:
[0063][0064]
其中,σ和μ为步骤s2中正态分布检验得到样本均值μ和标准差σ;
[0065]
s5:根据步骤s4中的概率密度函数f(x)和单个增广样本点概率构建首对增广点的增广公式,计算和并将数据点存入所述增光样本点集合xz中;
[0066]
和计算公式如下:
[0067][0068]
式中dt为积分对象,t为无量纲参数;
[0069]
s6:引入参数ai、bi,以概率密度函数f(x)为被积函数,令ai为积分下限、单个数据增广点概率为积分值,构建增广迭代公式,反求积分上限bi,根据ai、bi和所述步骤s2中的样本均值μ计算出增广样本点然后更新a
i+1
=bi;
[0070]bi
根据下式得出:
[0071][0072]
其中,ai为已知迭代参数;
[0073][0074]
计算公式如下:
[0075]
[0076]
其中,
[0077]
s7:重复步骤s6次,得到含有n个样本点的增广样本点集并与步骤s2的所述样本集x融合获得扩充后用于bayes-bootstrap法的数据点集
[0078]
s8:采用bayes-bootstrap法计算出样本点集的样本均值估计样本标准差估计从而计算出样本均值在置信度1-α=0.95的情况下的置信区间(μ
l
,μu);
[0079]
bayes-bootstrap法需先构造一个服从dirichlet分布的权值wi,wi=u
i-u
i-1
,其中ui为区间(0,1)的均匀分布的随机数;
[0080]
样本均值估计样本标准差估计计算公式如下:
[0081][0082]
其中,为数据点集中随机抽取的数据;
[0083]
置信区间计算公式如下:
[0084][0085]
其中,μu为置信区间上限,μ
l
为置信区间下限,为正态分布的分位点,可由查表得,n为数据点集xb中的样本总数;
[0086]
s9:计算出飞机水平测量要素的各个特征参数样本的95%置信区间(μ
il
,μ
iu
)超出该特征参数的失效预警区间(τ
i1
,τ
i2
)的比率ρi,然后按权值法计算出预警失效率ρ;
[0087]
预警失效率ρ的计算公式为:
[0088][0089]
式中ρi为对应参数的失效预警率,计算公式如下:
[0090][0091]
其中,τ
i1
为对应参数的失效预警区间下限,τ
i2
对应参数的失效预警区间上限;
[0092]
所述权值vi为某一机型的m种水平测量要素对飞机综合预警失效率的影响的体
现,不同机型其各个水平测量要素对应的权值也不同,皆由人工预先确定。且
[0093][0094]
其中,vi为对应参数的失效权值;
[0095]
s10:综合飞机服役年限以及所述预警失效率ρ,通过查询飞机失效曲线表确定飞机下次维修时间;
[0096]
飞机平均飞行时间以1000h为一个长度区间进行区分;
[0097]
飞机下次维修时间根据查表所得周期剩余时间及当前日期共同确定。
[0098]
实施例2
[0099]
本发明的一种基于bayes-bootstrap法的通航飞机维修周期确定方法,包括以下步骤:
[0100]
s1:在固定坐标系中测量飞机关键坐标点,根据坐标计算出每架飞机的水平测量要素的特征参数;在本发明所提供的实例中,以某批cessna172飞机的右侧机翼上反角角度为例进行小子样数据的虚拟增广和分析处理。其中,飞机关键位置的坐标点包括:机身测量数据点、机翼测量数据点、垂直尾翼安定面测量数据点和水平尾翼安定面测量数据点。其中,水平测量数据点的位置为:a点,机身舱门前隔框处的左舱门铰链下部固定螺钉头中心;b点,机身舱门前隔框处的右舱门铰链下部固定螺钉头中心点;c点,机身fs228.68站位处左侧从上至下算起,第1颗铆钉头中心点;d点,机身fs228.68站位处右侧从上至下算起,第1颗铆钉头中心点;u点,机身舱门后隔框处左门闩上部固定螺钉头中心点;v点,机身舱门后隔框处右门闩上部固定螺钉头中心点;e点,左机翼ws208.00站位处翼肋与前梁下表面的铆钉头中心点;f点,右机翼ws208.00站位处翼肋与前梁下表面的铆钉头中心点;g点,左机翼ws208.00站位处翼肋与后梁下表面的铆钉头中心点;h点,右机翼ws208.00站位处翼肋与后梁下表面的铆钉头中心点;i点,左机翼ws100.00站位处前缘翼肋与前梁下表面的铆钉头中心点;j点,右机翼ws100.00站位处前缘翼肋与前梁下表面的铆钉头中心点;k点,左机翼ws100.00站位处后缘翼肋与后梁下表面的铆钉头中心点;l点,右机翼ws100.00站位处后缘翼肋与后梁下表面的铆钉头中心点;m点,水平尾翼左前梁上表面与左外侧翼肋的铆钉头中心点;n点,水平尾翼右前梁上表面与右外侧翼肋的铆钉头中心点;q点,水平尾翼左后梁上表面与左外侧翼肋的铆钉头中心点;r点,水平尾翼右后梁上表面与右外侧翼肋的铆钉头中心点;s点,垂直尾翼左侧前梁上部铆钉头中心点;t点,垂直尾翼左侧后梁上部铆钉头中心点;s`点,垂直尾翼右侧前梁上部铆钉头中心点;t`点,垂直尾翼右侧后梁上部铆钉头中心点。
[0101]
s2:对样本数据进行初步统计分析,进行正态分布检验并获取样本正态分布数据特征。根据拉伊达准则剔除粗大误差得到有效样本点集x(x1,x2,
…
,xn);得到10个有效样本数据,样本均值样本标准差
[0102]
s3:根据bayes-bootstrap法以及实际情况确定增广数据量n,创建含有n个数据点的集合令单个增广数据点概率固定为本实例中设置增广数据
量n=200,则单个增广样本点的概率
[0103]
s4:根据s2步骤所得正态分布样本均值和标准差和s3步骤所得单个数据点的概率,确定虚拟增广所依据的概率密度函数f(x);本实例中
[0104][0105]
s5:根据f(x)和单个增广点概率构建首对增广点的增广公式,计算出和将数据点存入xz中,将a1更新为在本实例中
[0106][0107]
使用计算机令a1=178.776。
[0108]
s6:引入参数ai、bi,以f(x)为被积函数,令ai为积分下限、单个增广点概率为积分值,重新构建增广迭代公式,反求积分上限bi。根据ai、bi和μ计算出增广样本点然后更新a
i+1
=bi;在本实例中构建迭代公式
[0109][0110]
然后代入a1=178.776,求出b1,而后根据
[0111][0112]
计算出更新a2=178.813。
[0113]
s7:重复s6步骤次,得到含有n个样本点的增广点集并与原数据集x融合获得扩充后用于bayes-bootstrap法的数据点集本实例中,重复s6步骤直至求出得到全部200个虚拟增广数据点组成的增广点集将包含10个数据点的测量数据与xz融合得到含有210个数据点的点集xb的概率分布如附图2所示。
[0114]
s8:采用bayes-bootstrap法计算出样本点集的样本均值估计样本标准差估计从而计算出样本均值在置信度1-α=0.95的情况下的置信区间(μ
l
,μu)。在本实例中,采用bayes-bootstrap法计算出样本点集的样本均值估计样本标准差估计从而得到样本均值的95%置信区间为(173.112,184.402);
[0115]
s9:计算出飞机水平测量要素的各个特征参数样本的95%置信区间(μ
il
,μ
iu
)超出该特征参数的失效预警区间(τ
i1
,τ
i2
)的比率ρi,然后按权值法计算出预警失效率ρ。在本实
例中,飞机上反角的失效预警区间为(174,180),其预警失效率ρ1=0.882。本实例中样本对应机群的综合预警失效率为
[0116][0117]
s10:综合飞机服役年限以及预警失效率ρ查图3所示的飞机失效曲线表确定飞机下次维修时间;本实例中此批次飞机共99架,平均飞行时间处于(12000,13000)区间内,查表得下次整体检修应安排在本次检测的57天后,即可确定下次维修的合理时间。
[0118]
本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1