一种优化亮度、反差及色差的遥感影像匀光匀色方法
1.本发明涉及图像处理中的色彩校正技术领域,特别涉及一种优化亮度、反差及色差的遥感影像匀光匀色方法。
背景技术:
2.光学卫星易受季节和大气变化、光照和传感器失真等因素的影响。因此,覆盖大面积区域的卫星影像往往会出现明显的色差。近年来,随着对地观测迅速的发展,利用多视角遥感影像进行数据的匀色与拼接,可以产生一幅更为全面、可靠和完整的对地观测的全景影像。影像色彩差异的存在不仅影响影像的视觉效果,还会增加影像镶嵌的难度,降低镶嵌结果质量。在获得全景影像的处理中,如何消除影像之间的色彩差异,提高镶嵌影像的质量,显得尤为重要。
3.现有匀光匀色算法各有优点,但是都有其特殊性和针对性,在实际应用中为了达到令人满意的效果,通常需要人工交互调节参数。此外,匀光匀色处理时容易造成信息损失,引起影像质量的退化。由于遥感影像成像过程复杂,现有的匀光匀色模型常常采用灵活的样条曲线作为颜色重映射函数。
4.样条曲线是一种分段插值函数,每个局部曲线段仅由三个连续的锚点确定。常用的匀色算法以参数化的样条曲线为重映射函数,将多幅影像间的颜色差异表示为能量函数,然后对能量函数进行优化求解,最后,根据重映射函数进行色彩校正。这类算法通常能够有效的消除多幅影像之间的色彩差异,但是它无法同时消除影像内部亮度和反差的不一致性。
技术实现要素:
5.针对上述问题,本发明提供了一种新型的遥感影像匀光匀色方法,解决了现有匀光匀色算法在校正影像色彩差异时,无法同时校正影像的亮度和反差的问题,提高了结果影像的质量
6.为了达到上述目的,本发明提供了一种优化亮度、反差及色差的遥感影像匀光匀色方法,包括如下步骤:
7.(1)将采集的遥感影像从rgb色彩空间转换为ycbcr色彩空间;
8.(2)对所述遥感影像的y通道,采用分块wallis变换方法校正所述遥感影像的亮度和反差分布不均匀的现象;
9.(3)对所述遥感影像的cb、cr通道,将参数化的样条曲线作为颜色重映射函数,并使用影像重叠区域内计算的颜色对应关系加以约束,采用凸二次规划求解曲线的参数,用所述颜色重映射函数校正影像之间的色彩差异;
10.(4)将所述遥感影像从ycbcr色彩空间转换为rgb色彩空间,以还原图像。
11.进一步的,所述步骤2中的分块wallis变换方法包括:
12.(2.1)确定影像处理顺序:根据所述遥感影像的坐标信息构建邻接图,将所述遥感
影像看作是邻接图的节点,对所述邻接图进行广度优先搜索,将访问图中节点的顺序作为所述影像处理的顺序;
13.(2.2)确定所述遥感影像的当前参考影像:根据广度优先搜索访问节点的顺序,将节点的前驱节点作为所述遥感影像的当前参考影像;
14.(2.3)确定所述遥感影像的原始参考影像:计算出所有待处理的所述遥感影像y通道的平均梯度,取平均梯度最大的影像作为所有所述遥感影像的原始参考影像;
[0015][0016]
δ
x
=i(x+1,y)-i(x,y)
[0017]
δy=i(x,y+1)-i(x,y)
[0018]
其中:g为平均梯度,w和h分别是所述遥感影像的宽度和高度;i(x,y)是所述遥感影像像素点(x,y)的灰度值;
[0019]
(2.4)确定所述遥感影像的参考均值和标准差:将所述当前参考影像和所述原始参考影像的均值、标准差按照1:1的权重进行加权平均,求得所述遥感影像y通道的参考均值和参考标准差;
[0020]
(2.5)确定所述遥感影像分块数:根据影像块的预设宽度和高度w和h,划分影像块,计算所述遥感影像y通道的行列方向的分块数:
[0021][0022]
其中:cv是所述遥感影像的变异系数;cv
ref
是所述当前参考影像的变异系数;r和c分别是所述遥感影像的行数和列数,w和h分别是所述遥感影像y通道的行列方向的分块数;
[0023]
然后,针对划分好的所述影像块,计算其均值和标准差;
[0024]
(2.6)确定所述影像块角点参数:根据角点所属影像块个数,把所属影像块的均值的均值和标准偏差的均值赋给该角点,当影像块的均值或标准差为零时,该影像块不参加角点参数的计算;
[0025]
(2.7)确定所述影像块内像元的均值和标准差:根据所述影像块角点的均值和标准差,采用双线性插值方法计算所述影像块内像元的均值和标准差;
[0026]
(2.8)进行wallis变换:对于每一个所述影像块的像元,进行wallis变换,以完成所述遥感影像y通道的匀光处理;
[0027][0028]
其中,g(x,y)是原影像像素点(x,y)的灰度值;mg和sg分别为原影像的均值和标准差;f(x,y)是结果影像像素点(x,y)的灰度值;m
ref
和s
ref
分别是所述遥感影像y通道的参考均值和参考标准差。
[0029]
进一步的,所述分块wallis变换方法步骤(2.5)中对于宽度和高度都在8000像素左右的所述遥感影像,所述影像块的w和h都设为512,其它尺寸的所述遥感影像根据其自身宽高与8000的比值,对所述影像块的尺寸进行等比例缩放。
[0030]
进一步的,所述分块wallis变换方法步骤(2.6)中所述角点所属影像块个数:对于所述影像块的四个角点,分为:
[0031]
第一种情况是所述角点只属于一个影像块;
[0032]
第二种情况是所述角点由两个影像块共有;
[0033]
第三种情况是所述角点由四个影像块共有。
[0034]
进一步的,所述参数化的样条曲线,包括:
[0035]
根据所述遥感图像cb和cr通道的色域范围,分别设置n个等间距锚点和然后根据锚点构造两条所述参数化样条曲线作为颜色重映射曲线,使其能分别覆盖所述遥感图像cb和cr通道的强度范围,和为已知参数,和为未知参数,所述参数化样条曲线分别由未知参数和进行参数化表示。
[0036]
进一步的,所述步骤3中的颜色对应关系的约束,包括:
[0037]
分别计算重叠区域内cb和cr通道的累积分布函数cdf,取两个cdf对应的等概率分位数作为颜色对应关系分别用未知参数和来表达重映射值即
[0038][0039][0040]
其中t∈[0,1]为插值系数。
[0041]
进一步的,所述步骤3中的采用凸二次规划求解曲线的参数,包括:
[0042]
(3.1)通过所述参数化样条曲线计算出和重映射后的颜色值和来构造能量函数e;
[0043][0044]
其中:w
ij
是权重,该值与重叠区域面积成正比;k为重映射曲线的锚点数,k=n;m为影像重叠区域内提取的颜色对应关系的数量,
[0045]
并对所述参数化样条曲线fi和fj的斜率的上限和下限以及颜色重映射的值域加以约束:
[0046][0047][0048]
其中:τ
l
和τu是所述参数化样条曲线斜率的下限和上限;[v
min
,v
max
]是所述cb和cr通道中颜色重映射的色域范围;
[0049]
(3.2)用凸二次规划使得所述能量函数最小,求解所述参数化样条曲线的参数和并通过所述参数化样条曲线校正影像cb和cr通道的色彩差异。
[0050]
本发明的有益效果:
[0051]
1、采用分块wallis变换算法对影像的y通道进行校正能够有效的减小单幅影像内亮暗分布不均的情况,与此同时,该算法能够调整影像反差不一致的情况,以平衡影像内的反差,提升影像的质量。
[0052]
2、样条曲线模型的灵活性使得它能够有效地表示遥感影像之间的色彩差异。因此,用该模型对影像的cb,cr通道进行匀色,能够有效地校正较大的色彩差异。
[0053]
3、在影像的不同通道中分别进行亮度校正和颜色校正,既能够改善单幅影像内亮度和反差分布不均的情况,又能够有效减小多幅影像之间的颜色差异。
附图说明
[0054]
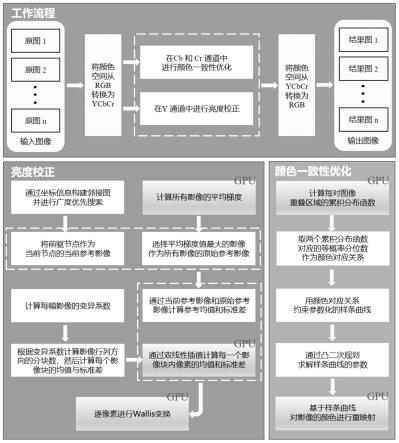
图1是本发明实施例优化亮度、反差及色差的遥感影像匀光匀色方法的总体结构示意图。
[0055]
图2是本发明实施例分段二次样条曲线建模的颜色重映射曲线的示意图。
[0056]
图3是本发明实施例影像重叠区域内的两条cdf曲线的示意图。
[0057]
图4是本发明实施例在landsat-8数据集上实验结果的示意图。
具体实施方式
[0058]
下面结合附图及较佳实施例详细说明本发明的具体实施方式。
[0059]
如图1所示,本发明实施例提供了一种优化亮度、反差及色差的遥感影像匀光匀色方法,包括如下步骤:
[0060]
s101、将采集的遥感影像从rgb色彩空间转换为ycbcr色彩空间;
[0061]
s102、对所述遥感影像的y通道,采用分块wallis变换方法校正所述遥感影像的亮度和反差分布不均匀的现象;
[0062]
包括如下步骤:
[0063]
(1)先对输入的影像,根据其地理坐标信息,构建邻接图来记录影像之间的重叠关系,然后对邻接图进行广度优先搜索,将访问节点的顺序作为影像匀光处理的顺序,将节点的前驱节点作为影像的当前参考影像。
[0064]
(2)通过公式计算出所有待处理影像y通道的平均梯度,取平均梯度值最大的影像
作为所有影像的原始参考影像。
[0065][0066]
δ
x
=i(x+1,y)-i(x,y)
[0067]
δy=i(x,y+1)-i(x,y)
[0068]
其中:g为平均梯度,w和h分别是遥感影像的宽度和高度;i(x,y)是遥感影像像素点(x,y)的灰度值;
[0069]
(3)将当前参考影像和原始参考影像的均值,标准差按照1:1的权重进行加权平均,求得每幅遥感影像y通道的参考均值和参考标准差。
[0070]
(4)根据实验的影像尺寸,对于宽度和高度都在8000像素左右的遥感影像,影像块的w和h都设为512,其它尺寸的遥感影像根据其自身宽高与8000的比值,对影像块的尺寸进行等比例缩放;然后通过公式计算影像y通道的行列方向的分块数,并算出每一个影像块的均值和标准差,分块数计算公式如下:
[0071][0072]
其中:cv是遥感影像的变异系数;cv
ref
是当前参考影像的变异系数;r和c分别是遥感影像的行数和列数,w和h分别是遥感影像y通道的行列方向的分块数。
[0073]
(5)根据角点所属影像块个数:
[0074]
第一种情况是角点只属于一个影像块。
[0075]
第二种情况是角点由两个影像块共有。
[0076]
第三种情况是角点由四个影像块共有。
[0077]
把所属影像块的均值的均值和标准偏差的均值赋给该角点,当影像块的参数(均值或标准差)为零时,该影像块不参加角点参数的计算。
[0078]
(6)根据影像块角点的均值和标准差,采用双线性插值方法计算影像块内像元的均值和标准差。
[0079]
(7)对于每一个影像块的像元,采用公式进行wallis变换,以完成影像y通道的匀光处理。
[0080][0081]
其中,g(x,y)是原影像像素点(x,y)的灰度值;mg和sg分别为原影像的均值和标准差;f(x,y)是结果影像像素点(x,y)的灰度值;m
ref
和s
ref
分别是遥感影像y通道的参考均值和参考标准差。
[0082]
s103、对所述遥感影像的cb、cr通道,将参数化的样条曲线作为颜色重映射函数,并使用影像重叠区域内计算的颜色对应关系加以约束,采用凸二次规划求解曲线的参数,用所述颜色重映射函数校正影像之间的色彩差异;
[0083]
(1)参数化的样条曲线:
[0084]
如图2所示,根据遥感图像cb和cr通道的色域范围,分别设置n个等间距锚点(图中
的交叉点)和实验中,n=6;然后根据锚点构造两条参数化样条曲线作为颜色重映射曲线,使其能分别覆盖所述遥感图像cb和cr通道的强度范围,和为已知参数,和为未知参数,样条曲线分别由未知参数和进行参数化表示。
[0085]
(2)颜色对应关系的约束
[0086]
如图3所示,分别计算影像重叠区域内cb和cr通道的累积分布函数(cdf),然后取两个cdf曲线对应的等概率分位数作为颜色对应关系分别用未知参数和来表达重映射值即
[0087][0088][0089]
其中t∈[0,1]为插值系数。
[0090]
实验中,概率的取值依次为:从而每个重叠区域内可以获得16对颜色对应关系。
[0091]
(3)采用凸二次规划求解曲线的参数
[0092]
通过所述参数化样条曲线计算出和重映射后的颜色值和来构造能量函数e;
[0093][0094]
其中:w
ij
是权重,该值与重叠区域面积成正比;k为重映射曲线的锚点数,k=n,m为影像重叠区域内提取的颜色对应关系的数量,实验中,k=n=6,m=16。
[0095]
并对所述参数化样条曲线fi和fj的斜率的上限和下限以及颜色重映射的值域加以约束:
[0096]
[0097][0098]
其中:τ
l
和τu是所述参数化样条曲线斜率的下限和上限;[v
min
,v
max
]是所述cb和cr通道中颜色重映射的色域范围。
[0099]
实验中,曲线斜率的下限设置为0.3,曲线斜率的上限设置为5,颜色重映射后结果影像cb或cr通道的值域保持不变。
[0100]
用凸二次规划使得所述能量函数最小,求解所述参数化样条曲线的参数和并通过所述参数化样条曲线校正影像cb和cr通道的色彩差异。
[0101]
s104、将所述遥感影像从ycbcr色彩空间转换为rgb色彩空间,以还原图像。
[0102]
实验的结果,如图4所示。为了表示影像之间存在的色彩差异,图中白色框突出了颜色不一致的区域。
[0103]
性能评估上使用的评价指标有:ssim(structural similarity结构相似性)、qcced(quality considered color euclideandistance考虑颜色欧氏距离的质量)和oei(one-dimensional entropy of images影像的一维熵)。
[0104]
指标ssim分别从亮度、对比度和结构三方面度量影像之间的相似性,取值范围为[0,1],值越大表示影像失真越小,其公式如下:
[0105]
ssim(x,y)=l(x,y)
·
c(x,y)
·
s(x,y)
[0106][0107]
其中,μ
x
、μy和σ
x
、σy分别表示影像x与影像y的均值和标准差。σ
xy
表示影像x和影像y的协方差。c1,c2和c3为常数,为了避免分母为零,通常取c1=(k1l)2,c2=(k2l)2,一般地k1=0.01,k2=0.03,l=255。
[0108]
指标qcced包括颜色欧式距离(ced)和平均梯度(mg)。ced反映了影像之间像素值的差异。ced越小,影像之间的颜色差异越小。mg反映了影像纹理的清晰度。mg越高,结果影像的质量越高。然后可以使用以下公式计算指标qcced,其中c是保持稳定的常数;通常将其设置为1。
[0109][0110][0111][0112]
指标oei是一种特征的统计形式,它反映了影像中平均信息量的多少,表示影像灰度分布的聚集特征所包含的信息量。其公式如下:
[0113][0114]
其中,pi表示影像中灰度值为i的像素所占的比例。影像的一维熵越大,则影像的信息量越大,与此同时,影像包含的灰度级也就越丰富。
[0115]
通过与现有的两种匀光匀色算法进行对比,我们发现本发明提出的方法具有最佳的性能,具体如下表所示。
[0116][0117]
虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这些仅是举例说明,在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,因此,本发明的保护范围由所附权利要求书限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1