一种基于点云特征分区的自适应点云精简方法
1.本发明属于点云处理与应用领域,特别是涉及一种基于点云特征分区的自适应点云精简方法。
背景技术:
2.随着虚拟匹配技术的发展与应用,由激光扫描仪扫描得到的点云模型质量的保证与提升越来越受到人们的关注,但点云数量的冗余极易造成点云处理效率低、重构模型质量低下等问题,所以点云精简处理就显得尤为重要。
3.常用的点云精简算法有随机采样法、包围盒采样法和曲率采样法等方法。随机采样法快速简单,其基本原理是通过随机数函数对点云数据进行选择并删除,该方法原理简单,但是精度低。包围盒采样法的精简算法是对点云进行最小立方体的构造,用立方体的中心点或重心点代替立方体中其他的点来进行下采样操作,精简效果与立方体尺寸的选取密切相关。基于曲率采样的点云精简算法原理是通过点云数据的曲率信息进行简化的曲率大的地方则数据点保留得多,曲率变化小的区域则数据点保留得少。
4.但采用任意一种精简算法对点云数据进行精简处理,无区别性地对点云进行下采样操作,极易造成点云模型的重要特征数据点误删除或过度简化等问题。所以ji等人通过k近邻搜索设计了一种根据点权值简化算法,通过所设计的特征公式对点的重要性进行判断,最后采用八叉树对点云进行二次简化,方法思想即是通过特征对点云数据进行分类,而后再精简点云数据,这一思想在点云精简处理过程中越来越受到研究人员的关注。
技术实现要素:
5.本发明针对现有技术的不足,提供了一种基于点云特征分区的自适应点云精简方法。即将点云先进行特征分类,依据点云特征对点云模型进行分区处理,有区别性地对点云数据进行简化操作,提高处理效率。其中点云轮廓线为强特征,包含了模型重要信息,一般保留不做精简,对于曲率变化较大的一般特征点云则采用曲率法进行简化处理,对于其他的非特征点云则采用包围盒法进行下采样操作。
6.为了达到以上目的,本发明提供点云精简技术方案包括以下步骤:
7.步骤1:基于k-d树对目标点云建立索引;
8.步骤2:采用主成分分析法(principal component analysis,pca)计算点云法向量;
9.步骤3:采用弦法向量法计算点云主曲率k1、k2;
10.步骤4:通过主曲率计算点云平均曲率mc、点云整体平均曲率和标准偏差mc
std
;
11.步骤5:结合统计学原理设定阈值l与点云平均曲率对强特征点云进行识别并保留;
12.步骤6:计算点云k近邻法向量夹角平均值fi;
13.步骤7:依据法向量夹角阈值γi进行一般特征点云区域与非特征点云区域进行区
分;
14.步骤8:采用曲率法对一般特征点云区域进行精简处理;
15.步骤9:采用包围盒法对非特征点云区域进行精简处理;
16.针对步骤1中对点云建立k-d树,建立索引,提高点云后续处理效率。
17.针对步骤2中采用pca算法计算点云法向量,计算过程如下:
18.对于点云中的每个扫描点p,搜索到与其近邻的k个相邻点,然后计算这些点的最小二乘意义上的局部平面p,此平面可以表示为:
[0019][0020]
式中,为平面p的法向量,d为p到坐标原点的距离;pi为k邻域中任一搜索点到原点的方向向量,i为1~k中任一点编号。
[0021]
可以认为由k个最近点拟合出的平面的法向量即当前扫描点的法向量。平面p的法向量可以由主成分分析(pca)得到,由运算知p经过其k邻近域点的质心p0,且法向量满足先对式(2)中的协方差矩阵m进行特征值分解,求得m的各特征值,m最小特征值对应的特征向量即点p的法向量。
[0022][0023]
通过pca计算得到的点云法向量方向不确定,只能得到法向量所在的直线,无法确定法向量的最终指向,从而导致一个平面上点云法向指向不统一的问题,影响后续处理操作效果,本发明采用hoppe提出的近似求解算法来进行法向量修正。
[0024]
针对步骤3,点云表面上特定点的相邻点决定其局部形状,如果通过曲面拟合来估计曲率,可能会产生较大的误差,所以应该考虑法向量的贡献。所以本文采用弦法向量来估计一个点的曲率,其优点是只考虑一个相邻点,利用这一点来构造一条正截面曲线,进而构造法向截面圆,并根据两个点的位置和法向向量来估计特定点的法向曲率。具体计算过程如下:
[0025]
对于点云中的每个点p,设p点的为法向量为n,使用点坐标和法向量来估计点p处的法向曲率:假设p点附近有m个近邻点,qi为点p第i个近邻点,qi的法向量为mi,设正交坐标{undefinedp,x,y,z}为点p的局部坐标系l,n表示p点的法向量。x和y为正交的单位向量。在l中,p,qi,mi的坐标可以是(0,0,0),qi为(xi,yi,zi),mi为(n
x
,i,ny,i,nz,i),则点p的法曲率可以通过其密切圆估计。
[0026]
则p相对于qi的法曲率估计如下:
[0027][0028]
式中,n为p点法向量,α是向量-n和pqi之间的夹角,β是向量n和mi之间的夹角,等式(3)近似值也可表示为
[0029]
[0030]
式中:
[0031]
然后通过欧拉方程得出法向曲率与主曲率关系:
[0032][0033]
式中:θi+θ为点p过qi的法截线的切线与主方向的夹角,θ为向量e1和e2的夹角,θi可以用点qi的局部坐标系计算,并且公式(5)可以写成一个优化问题:
[0034][0035]
其中,m为p点附近点的个数,将公式(6)写成矩阵形式:
[0036][0037]
其中m为矩阵:
[0038][0039]
r为矩阵:
[0040][0041]
对式(7)最小二乘拟合,可以获得μ的估计值,可以推断出主曲率k1、k2是矩阵:
[0042][0043]
的特征值。把w的单位特征向量从局部坐标系l变换到全局坐标系,就得到主方向向量。
[0044]
针对步骤4,点云平均曲率、整体平均曲率和标准偏差计算如公式(11)、(12)和(13)所示:
[0045]
[0046][0047][0048]
其中,ci为k邻域中第i个点的曲率值。
[0049]
针对步骤5,判断当前每个pi的曲率mci是否大于设定的阈值l。当mci>l时,保留点pi作为强特征点;如公式(14)所示,其中,σ为计算系数,一般根据取值2~5。阈值l计算公式为:
[0050][0051]
针对步骤6至步骤9,假设点云中某一点pi与其k近邻点法向量夹角的算术平均值为:
[0052][0053]
式中θ
ij
为点pi的法向量与其近邻点pj法向量夹角,j为k近邻点中第j个点。选取合适阈值γi,若fi>γi,则判别为一般特征点云的数据,然后采用曲率法来进行点云数据的精简,若fi<γi,则判别为非特征点云,运用包围盒法进行精简处理。
[0054]
与现有技术相比,本发明具有如下的优点:
[0055]
本发明采用依据点云特征将点云模型进行先分区再精简的精简方案,技能区别性地对点云进行下采样,保证了精简后的点云模型不失真,同时分区处理,提高了点云处理效率;同时,本发明采用弦法向量法计算出点云主曲率相关信息,保证曲率参数与法向量参数的准确性与鲁棒性,参数设置简且参数数量较少,具有一定的自适应能力,可有效解决实际生产中不同类型点云模型精简参数设置不确定的难题。实验结果证明本发明采用的基于分区的混合下采样精简算法,能够达到精简点云效果的同时也能保证点云模型质量。
附图说明
[0056]
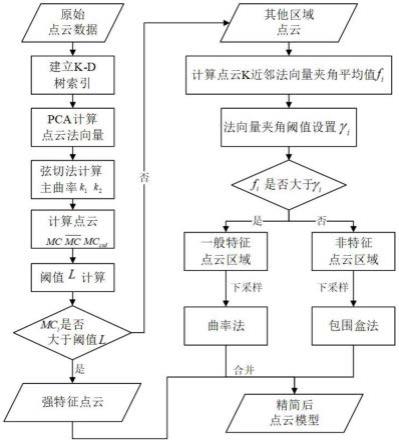
图1为本发明点云精简整体方案流程图。
[0057]
图2为密切圆与法向量变量集合关系。
[0058]
图3为一般特征区域与非特征区域法向量示意图。
[0059]
图4为bunny、通用三角锥及0号工程零件强特征保留结果示意图。
[0060]
图5为不同精简方案精简效果对比示意图。
[0061]
图6为不同精简方案点云模型重构效果对比示意图。
具体实施方式
[0062]
下面结合附图和实例对本发明的技术方案作进一步说明。
[0063]
如图1所示,本发明一种基于点云特征分区的自适应点云精简方法,包括以下步骤:
[0064]
步骤1,建立k-d树索引,为后续点云处理操作做准备,提高点云处理效率。
[0065]
步骤2,采用主成分分析法pca计算点云法向量。对于点云中的每个扫描点p,搜索
到与其k近邻点,然后计算这些点的最小二乘意义上的局部平面p,此平面可以表示为:
[0066][0067]
式中,为平面p的法向量,d为p到坐标原点的距离;pi为k近邻点中第i个点的法向量;
[0068]
可以认为由k个最近点拟合出的平面的法向量即当前扫描点的法向量。平面p的法向量可以由主成分分析(pca)得到,由运算知p经过其k邻近域点的质心p0,且法向量满足先对式(2)中的协方差矩阵m进行特征值分解,求得m的各特征值,m最小特征值对应的特征向量即点p的法向量。
[0069][0070]
通过pca计算得到的点云法向量方向不确定,只能得到法向量所在的直线,无法确定法向量的最终指向,从而导致一个平面上点云法向指向不统一的问题,影响后续处理操作效果,随即采用hoppe提出的近似求解算法来进行法向量修正。
[0071]
步骤3,采用弦法向量计算点云主曲率k1、k2,具体计算过程如下:
[0072]
对于点云中的每个点p,设p点的为法向量为n,使用点坐标和法向量来估计点p处的法向曲率:假设p点附近有m个近邻点,qi为点p第i个近邻点,qi的法向量为mi,设正交坐标{undefinedp,x,y,z}为点p的局部坐标系l,n表示p点的法向量。x和y为正交的单位向量。在l中,p,qi,mi的坐标可以是(0,0,0),qi为(xi,yi,zi),mi为(n
x
,i,ny,i,nz,i),则点p的法曲率可以通过其密切圆估计,图2显示了上述变量集合的关系。
[0073]
则p相对于qi的法曲率估计如下:
[0074][0075]
式中,n为p点法向量,α是向量-n和pqi之间的夹角,β是向量n和mi之间的夹角,等式(3)近似值也可表示为:
[0076][0077]
式中:
[0078]
然后通过欧拉方程得出法向曲率与主曲率关系:
[0079][0080]
式中:θi+θ为点p过qi的法截线的切线与主方向的夹角,θ为向量e1和e2的夹角,θi可以用点qi的局部坐标系计算,并且公式(5)可以写成一个优化问题:
[0081][0082]
其中,m为p点附近点的个数;将公式(6)写成矩阵形式:
[0083][0084]
其中m为矩阵:
[0085][0086]
r为矩阵:
[0087][0088]
对式(7)最小二乘拟合,可以获得μ的估计值,可以推断出主曲率k1、k2是矩阵:
[0089][0090]
的特征值。把w的单位特征向量从局部坐标系l变换到全局坐标系,就得到k1、k2。
[0091]
步骤4,点云平均曲率、整体平均曲率和标准偏差计算如公式(11)、(12)和(13)所示:
[0092][0093][0094][0095]
其中,ci为k邻域中第i个点的曲率值。
[0096]
步骤5,判断当前每个pi的曲率mci是否大于设定的阈值l。当mci>l时,保留点pi作为强特征点;如公式(14)所示,其中,σ取值为3。阈值l计算公式为:
[0097][0098]
本发明针对三种模型的强特征提取结果如图4所示。
[0099]
步骤6计算点云平均法向量,计算公式如下:
[0100][0101]
式中θ
ij
为点pi的法向量与其近邻点pj法向量夹角,j为k近邻点中第j个点;如图3所示。选取合适阈值γi。若fi>γi,则判别为一般特征点云的数据;若fi<γi,则判别为非特征点云。
[0102]
步骤7,设定角度阈值γi分别为20
°
、30
°
、30
°
,一般特征点云区域与非特征点云区域区分完成。
[0103]
步骤8,对一把特征点云区域采用曲率法进行精简操作,效果如图5本发明提出的“混合下采样”结果所示。
[0104]
步骤9,对非特征点云区域采用包围盒法进行精简操作,效果如图5本发明提出的“混合下采样”结果所示。
[0105]
图6为经过本发明提出的精简方法后点云模型的重构模型示意图,由重构模型可以看出,单一地采用某种下采样算法对点云模型进行精简处理,容易造成点云特征流失和过度精简的问题,从而造成重构模型孔洞,模型质量大大降低,而本发明提出的根据点云特征,对点云进行先分区再精简,能够在保证点云质量的同时,达到减少点云数据量的效果,并且本文提出的采用弦法向量的算法及统计学原理等方法也能大大提高点云特征识别与区分的鲁棒性。
[0106]
总之,本发明上述实施例基于点云特征分区的自适应点云精简方法。首先对原始点云建立k-d树索引;而后采用主成分分析法计算点云法向量,结合弦切圆计算出点云主曲率,推导出点云平均曲率、整体点云平均曲率及曲率标准偏差。接着根据前述得到的参数计算出曲率阈值l,将点云识别为强特征点云与其他区域点云,强特征点云包含点云模型重要数据信息,予以保留。接着,计算出其他区域点云k近邻法向量夹角平均值fi,设定夹角阈值,将点云区分为一般特征点云区域与非特征点云区域;接着对一般特征点云才用曲率法做精简处理,对非特征点云采用包围盒法做精简处理;最后将保留的强特征点云与精简后的一般特征点云和非特征点云合并,得到最终需要的精简点云模型。
[0107]
以上所述仅对本发明实施例结合附图进行了说明,但本发明不限于上述实施例,还可以根据本发明的发明创造的目的做出多种变化,凡依据本发明技术方案的精神实质和原理下做的改变、修饰、替代、组合或简化,均应为等效的置换方式,只要符合本发明的发明目的,只要不背离本发明的技术原理和发明构思,都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1