一种基于点云融合的行车场景识别系统、方法及设备与流程
1.本发明属于行车场景数据识别技术领域,尤其涉及一种基于点云融合的行车场景识别系统、方法及设备。
背景技术:
2.为提高测绘服务效率,改善城市基础设施,促进城市产业结构的调整,提高城市规划、建设、管理和服务水平,促进资源的合理配置,优化资源、环境、人口与发展的相互关系,为经济发展、科学规划提供精确的基础数据。需启动1:500地形图数据更新技术,完成1:500基础地理信息数据采集、建库、dom制作、城区影像挂图等工作。某省卫星定位连续运行综合服务系统以“共建共享”的方式,纳入已建cors系统以及邻省共享站点,形成了覆盖全区域的统一、实时、快速、高精度的卫星定位综合应用服务系统。该系统可用于行车场景航空摄影时获取装备的定位定姿,测区像控点测量、图根点布设、成果精度检测。
3.通过上述分析,现有技术存在的问题及缺陷为:现有技术行车场景获得的图与原地物要素变化率大于40%,使得图像精度低。现有技术场景识别中获取影像或点云后,识别车道线等行车场景准确度低。
技术实现要素:
4.为克服相关技术中存在的问题,本发明公开实施例提供了一种基于点云融合的行车场景识别系统、方法及设备。
5.所述技术方案如下:一种基于点云融合的行车场景识别方法包括:
6.以固定翼无人机搭载数码相机进行测区影像获取,像控点选点位置远离高树、高楼、高压线、水面;根据无人机定位、行车方位精度和相机成果控制点按一定间距在测区均匀布设,并布设一定数量的检查点;
7.对接收的测区影像经数据格式转换、畸变纠正后,利用影像处理系统进行空三加密,所述空三加密包括:原始数据经过数据格式装换、畸变差纠正后导入软件,经过连接点提取、控制点刺点、平差调整后形成空三加密成果;基于形成的空三加密成果,再通过dsm匹配、点云滤波、dem人工编生成dem成果,然后经过影像数字微分纠正、匀光匀色、镶嵌编辑、分幅裁切、图面修复、元数据制作生成dom成果,基于获取的dem成果与dom成果进行行车场景识别。
8.在一个实施例中,在空三加密中,经过连接点提取、控制点刺点、平差调整后形成空三加密成果前还需进行:利用影像自动匹配出行车方向和旁向的像点,将全区域中各行带网纳入到比例尺统一的坐标系统中,拼成一个松散的区域网,确认每张像片的外方位元素和地面点坐标的概略位置,然后根据行车控制点,逐点建立行车坐标模型,求解出每张像片的外方位元素和加密点的行车坐标。
9.在一个实施例中,所述建立行车坐标模型,求解出每张像片的外方位元素和加密点的行车坐标包括:
10.步骤1,建立用于行车方位计算的参考坐标系r、行车坐标系b以及用于滤波的参考坐标系
11.步骤2,进行行车方位误差定义,进行控制点采样并构造全局行车方位所对应的控制点;
12.步骤3,将行车方位控制点在行车方位行驶学方程中纠正并构造纠正后的行车方位误差控制点;
13.步骤4,进行常规的预测及预测方差计算,并分别进行量测更新以及全局行车方位更新;进行行车方位误差估计置零;
14.步骤5,进入下一时刻的滤波流程,重复步骤1至步骤4;
15.步骤1中,所述建立用于行车方位计算的参考坐标系r、行车坐标系以及用于滤波的参考坐标系包括:
16.建立行车方位计算所在的坐标系即参考坐标系r,所述参考坐标系r可为惯性坐标系、地球坐标系或当地地理坐标系;
17.建立行车坐标系b,所述行车坐标系b为惯性传感器即陀螺仪和加速度计所在的坐标系;
18.建立用于滤波的参考坐标系所述用于滤波的参考坐标系为so(3)-ukf滤波算法中所估计的参考坐标系,所述用于滤波的参考坐标系与所述参考坐标系r之间的误差即为行车方位误差。
19.步骤2中,所述行车方位误差定义如下:
[0020][0021]
其中,表示真实的误差矩阵,表示对应的估计值;
[0022]
所述进行控制点采样并构造全局行车方位所对应的控制点包括:
[0023]
利用上一时刻行车方位方差p
k-1
进行控制点采样如下:
[0024][0025]
所述构造全局行车方位所对应的控制点包括:
[0026]
将行车方位误差控制点转换为矩阵形式:
[0027][0028]
其中,so3_exp[
·
]所定义的转换公式为:
[0029][0030]
利用上一时刻的行车方位估计值构造全局行车方位所对应的控制点
[0031][0032]
步骤3中,所述将行车方位控制点在行车方位行驶学方程中纠正包括:
[0033]
[0034]
其中,ω(
·
)表示行车方位行驶学方程;
[0035]
所述构造纠正后的行车方位误差控制点;
[0036]
根据定义的行车方位误差,构造纠正后的行车方位误差控制点:
[0037][0038]
将矩阵形式的行车方位误差转换为矢量形式的误差:
[0039][0040]
其中,so3_log[
·
]所定义的转换公式为:
[0041][0042]
步骤4中,所述进行常规预测及预测方差计算如下:
[0043][0044][0045]
其中,w(i)表示控制点所对应的权值,q
k-1
表示状态方差阵;
[0046]
所述分别进行量测更新以及全局行车方位更新包括:
[0047]
所述进行量测更新包括:
[0048]
通过量测更新得到矢量行车方位误差估计及其对应的方差,即
[0049][0050]
其中,h(
·
)表示量测方程,yk表示k时刻的量测信息,rk表示量测噪声方差;
[0051]
所述进行全局行车方位更新包括:
[0052]
将矢量行车方位误差估计转换为矩阵形式
[0053][0054]
根据行车方位误差定义,得到当前时刻的全局行车方位更新:
[0055][0056]
所述行车方位误差估计置零如下:
[0057][0058]
所述基于坐标系纠正的so(3)-ukf行车方位估计方法还包括:
[0059]
当行车方位误差定义为时,行车方位控制点构造为纠正后的行车方位误差控制点为行车方位更新为
[0060]
当行车方位误差定义为时,行车方位控制点构造为纠正后的行车方位误差控制点为行车方位更新为
[0061]
当行车方位误差定义为时,行车方位控制点构造为纠正后的行车方位误差控制点为行车方位更新为
[0062]
在一个实施例中,所述基于点云融合的行车场景识别方法还包括:
[0063]
对空三加密的数据进行dem编辑、dom制作,获得dom成果;
[0064]
基于空三加密后数据,对现有dlg数据进行更新获得1:500dlg成果,基于1:500dlg成果建立1:500数据库;
[0065]
基于1:500dlg成果进行1:2000dlg缩编,获取1:2000dlg成果,基于1:2000dlg成果建立1:2000dlg数据库;
[0066]
基于获得的dom成果、建立的1:500数据库以及1:2000dlg数据库,进行挂图制作;
[0067]
对制作的挂图进行评定;对平定后的挂图进行传输终端进行可视化显示。
[0068]
本发明的另一目的在于提供一种基于点云融合的行车场景识别系统包括:
[0069]
像控布设及影像获取模块,以固定翼无人机搭载数码相机用于进行测区影像获取;
[0070]
空三加密模块,用于对接收的测区影像经数据格式转换、畸变纠正后,利用影像处理系统进行空三加密;
[0071]
dom成果获取模块,用于对空三加密的数据进行dem编辑、dom制作,获得dom成果;
[0072]
1:500数据库建库模块,用于基于空三加密后数据,对现有dlg数据进行更新获得1:500dlg成果,基于1:500dlg成果建立1:500数据库;
[0073]
1:2000数据库建库模块,用于基于1:500dlg成果进行1:2000dlg缩编,获取1:2000dlg成果,基于1:2000dlg成果建立1:2000dlg数据库;
[0074]
挂图制作模块,基于获得的dom成果、建立的1:500数据库以及1:2000dlg数据库,进行挂图制作;
[0075]
质量检查和评定模块,用于对制作的挂图进行评定;
[0076]
成果上交模块,用于对平定后的挂图进行传输终端进行可视化显示。
[0077]
本发明的另一目的在于提供一种计算机设备,所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行所述的基于点云融合的行车场景识别方法。
[0078]
结合上述的所有技术方案,本发明所具备的优点及积极效果为:
[0079]
第一、针对上述现有技术存在的技术问题以及解决该问题的难度,紧密结合本发明的所要保护的技术方案以及研发过程中结果和数据等,详细、深刻地分析本发明技术方
案如何解决的技术问题,解决问题之后带来的一些具备创造性的技术效果。具体描述如下:
[0080]
本发明在场景识别中获取影像或点云后,通过提供的识别算法识别车道线等行车场景准确度高。本发明数字正射影像图明显地物点的平面位置中误差不大于0.3m。平面位置中误差的两倍为其最大误差,图幅接边误差不大于2个像元。1:500地形图:图上地物点对邻近野外控制点的平面位置中误差不大于0.3m,高程注记点对邻近野外控制点的高程中误差不大于0.2m,等高线对邻近野外控制点的高程中误差不大于0.25m,特殊困难地区(大面积植被覆盖、乱掘地、采沙场等)的中误差不大于0.5倍。使得获得的图像精准度高。
[0081]
第二、把技术方案看作一个整体或者从产品的角度,本发明所要保护的技术方案具备的技术效果和优点,具体描述如下:
[0082]
本发明获取测区范围内地面分辨率优于5cm的航摄影像,经过像控布设、数字空三加密、dem编辑、正射纠正等工作后,制作了5cm分辨率的正射影像图。制作了城区影像挂图20套。采用全数字摄影测量技术完成1:500dlg数据采集成图,面积约152.51
㎞2。以新测制的1∶500dlg数据为基础,缩编为1∶2000dlg。以新测制的1:500dlg和缩编的1:2000数据为数据源,构建一体化无缝拼接的数据库。本发明一标段完成了整个测区范围的影像获取、空三加密、正射影像制作以及矢量数据整合工作;以309国道中心线为界,309国道以北为二标段作业范围,面积约61.46km2,完成了作业范围内1:500dlg生产、1:2000dlg缩编及数据入库工作;309国道以南为三标段作业范围,面积约91.05km2,完成了作业范围内1:500dlg生产、1:2000dlg缩编及数据入库工作。
[0083]
本发明在空三加密中,经过连接点提取、控制点刺点、平差调整后形成空三加密成果前还需进行:利用影像自动匹配出行车方向和旁向的像点,将全区域中各行带网纳入到比例尺统一的坐标系统中,拼成一个松散的区域网,确认每张像片的外方位元素和地面点坐标的概略位置,然后根据行车控制点,逐点建立行车坐标模型,求解出每张像片的外方位元素和加密点的行车坐标。获得的图像数据清晰。
附图说明
[0084]
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。
[0085]
图1是本发明实施例提供的基于点云融合的行车场景识别系统示意图;
[0086]
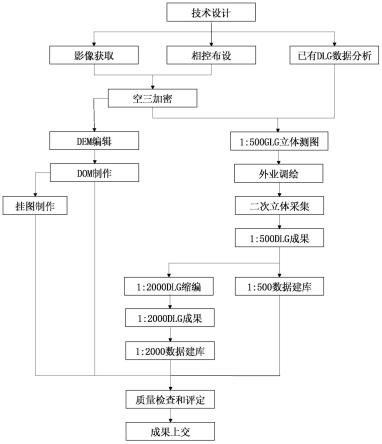
图2是本发明实施例提供的点云融合的行车场景构建方法总体技术路线如图;
[0087]
图3是本发明实施例提供的利用inpho影像处理系统进行空三加密流程图;
[0088]
图4是本发明实施例提供的dlg生产技术流程图;
[0089]
图5是本发明实施例提供的dlg缩编流程图;
[0090]
图中:1、像控布设及影像获取模块;2、空三加密模块;3、dom成果获取模块;4、1:500数据库建库模块;5、1:2000数据库建库模块;6、挂图制作模块;7、质量检查和评定模块;8、成果上交模块。
具体实施方式
[0091]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发
明。但是本发明能够以很多不同于在此描述的其他方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
[0092]
一、解释说明实施例:
[0093]
实施例1
[0094]
如图1所示,本发明实施例提供一种基于点云融合的行车场景识别系统包括:
[0095]
像控布设及影像获取模块1,以固定翼无人机搭载数码相机用于进行测区影像获取;
[0096]
空三加密模块2,用于对接收的测区影像经数据格式转换、畸变纠正后,利用影像处理系统进行空三加密;
[0097]
dom成果获取模块3,用于对空三加密的数据进行dem编辑、dom制作,获得dom成果;
[0098]
1:500数据库建库模块4,用于基于空三加密后数据,对现有dlg数据进行更新获得1:500dlg成果,基于1:500dlg成果建立1:500数据库;
[0099]
1:2000数据库建库模块5,用于基于1:500dlg成果进行1:2000dlg缩编,获取1:2000dlg成果,基于1:2000dlg成果建立1:2000dlg数据库;
[0100]
挂图制作模块6,基于获得的dom成果、建立的1:500数据库以及1:2000dlg数据库,进行挂图制作;
[0101]
质量检查和评定模块7,用于对制作的挂图进行评定;
[0102]
成果上交模块8,用于对平定后的挂图进行传输终端进行可视化显示。
[0103]
在一个实施例中,所述dom成果获取模块3包括:dem编辑模块,用于对空三加密后数据进行dem编辑;dom制作模块用于对dem编辑的数据进行dom制作,将dom制作的数据传输至挂图制作模块6。所述1:500数据库建库模块4包括:1:500glg立体测绘模块,用于进行1:500立体测绘图像;外业调绘模块用于进行图像的调制;二次采集模块用于进行二次立体图像的采集;1:500dlg成果获取模块用于获取1:500dlg成果。
[0104]
本发明实施例还提供一种基于点云融合的行车场景识别方法包括:
[0105]
步骤一,以固定翼无人机搭载数码相机用于进行测区影像获取;
[0106]
步骤二,对接收的测区影像经数据格式转换、畸变纠正后,利用影像处理系统进行空三加密;
[0107]
步骤三,对空三加密的数据进行dem编辑、dom制作,获得dom成果;
[0108]
步骤四,基于空三加密后数据,对现有dlg数据进行更新获得1:500dlg成果,基于1:500dlg成果建立1:500数据库;
[0109]
步骤五,基于1:500dlg成果进行1:2000dlg缩编,获取1:2000dlg成果,基于1:2000dlg成果建立1:2000dlg数据库;
[0110]
步骤六,基于获得的dom成果、建立的1:500数据库以及1:2000dlg数据库,进行挂图制作;
[0111]
对制作的挂图进行评定;对平定后的挂图进行传输终端进行可视化显示。
[0112]
在一个实施例中,在步骤一中以固定翼无人机搭载数码相机用于进行测区影像获取中,像控点选点位置远离高树、高楼、高压线、水面对gps信号影响大的地方;根据无人机定位、行车方位精度和相机成果精度要求,控制点按间距1km一个在测区均匀布设,并布设一定数量的检查点。
[0113]
在一个实施例中,在步骤二中所述进行空三加密包括:使用inpho影像处理系统,原始数据经过数据格式装换、畸变差纠正后导入inpho软件,经过连接点提取、控制点刺点、平差调整后形成空三加密成果。
[0114]
在一个实施例中,在空三加密中,经过连接点提取、控制点刺点、平差调整后形成空三加密成果前还需进行:利用影像自动匹配出行车方向和旁向的像点,将全区域中各行带网纳入到比例尺统一的坐标系统中,拼成一个松散的区域网,确认每张像片的外方位元素和地面点坐标的概略位置,然后根据行车控制点,逐点建立行车坐标模型,求解出每张像片的外方位元素和加密点的行车坐标。
[0115]
在一个实施例中,所述建立行车坐标模型,求解出每张像片的外方位元素和加密点的行车坐标包括:
[0116]
步骤1,建立用于行车方位计算的参考坐标系r、行车坐标系b以及用于滤波的参考坐标系
[0117]
步骤2,进行行车方位误差定义,进行控制点采样并构造全局行车方位所对应的控制点;
[0118]
步骤3,将行车方位控制点在行车方位行驶学方程中纠正并构造纠正后的行车方位误差控制点;
[0119]
步骤4,进行常规的预测及预测方差计算,并分别进行量测更新以及全局行车方位更新;进行行车方位误差估计置零;
[0120]
步骤5,进入下一时刻的滤波流程,重复步骤1至步骤4;
[0121]
步骤1中,所述建立用于行车方位计算的参考坐标系r、行车坐标系以及用于滤波的参考坐标系包括:
[0122]
建立行车方位计算所在的坐标系即参考坐标系r,所述参考坐标系r可为惯性坐标系、地球坐标系或当地地理坐标系;
[0123]
建立行车坐标系b,所述行车坐标系b为惯性传感器即陀螺仪和加速度计所在的坐标系;
[0124]
建立用于滤波的参考坐标系所述用于滤波的参考坐标系为so(3)-ukf滤波算法中所估计的参考坐标系,所述用于滤波的参考坐标系与所述参考坐标系r之间的误差即为行车方位误差。
[0125]
步骤2中,所述行车方位误差定义如下:
[0126][0127]
其中,表示真实的误差矩阵,表示对应的估计值;
[0128]
所述进行控制点采样并构造全局行车方位所对应的控制点包括:
[0129]
利用上一时刻行车方位方差p
k-1
进行控制点采样如下:
[0130][0131]
所述构造全局行车方位所对应的控制点包括:
[0132]
将行车方位误差控制点转换为矩阵形式:
[0133][0134]
其中,so3_exp[
·
]所定义的转换公式为:
[0135][0136]
利用上一时刻的行车方位估计值构造全局行车方位所对应的控制点
[0137][0138]
步骤3中,所述将行车方位控制点在行车方位行驶学方程中纠正包括:
[0139][0140]
其中,ω(
·
)表示行车方位行驶学方程;
[0141]
所述构造纠正后的行车方位误差控制点;
[0142]
根据定义的行车方位误差,构造纠正后的行车方位误差控制点:
[0143][0144]
将矩阵形式的行车方位误差转换为矢量形式的误差:
[0145][0146]
其中,so3_log[
·
]所定义的转换公式为:
[0147][0148]
步骤4中,所述进行常规预测及预测方差计算如下:
[0149][0150][0151]
其中,w(i)表示控制点所对应的权值,q
k-1
表示状态方差阵;
[0152]
所述分别进行量测更新以及全局行车方位更新包括:
[0153]
所述进行量测更新包括:
[0154]
通过量测更新得到矢量行车方位误差估计及其对应的方差,即
[0155][0156]
其中,h(
·
)表示量测方程,yk表示k时刻的量测信息,rk表示量测噪声方差;
[0157]
所述进行全局行车方位更新包括:
[0158]
将矢量行车方位误差估计转换为矩阵形式
[0159]
[0160]
根据行车方位误差定义,得到当前时刻的全局行车方位更新:
[0161][0162]
所述行车方位误差估计置零如下:
[0163][0164]
所述基于坐标系纠正的so(3)-ukf行车方位估计方法还包括:
[0165]
当行车方位误差定义为时,行车方位控制点构造为纠正后的行车方位误差控制点为行车方位更新为
[0166]
当行车方位误差定义为时,行车方位控制点构造为纠正后的行车方位误差控制点为行车方位更新为
[0167]
当行车方位误差定义为时,行车方位控制点构造为纠正后的行车方位误差控制点为行车方位更新为
[0168]
在一个实施例中,在步骤二获得dom成果中,需进行dom制作,包括以下步骤:
[0169]
在空三加密成果的基础上,通过dsm匹配、点云滤波、dem人工编生成dem成果,再经过影像数字微分纠正、匀光匀色、镶嵌编辑、分幅裁切、图面修复、元数据制作生成dom成果。
[0170]
在一个实施例中,所述进行dom制作包括:
[0171]
(1)dsm匹配和点云滤波:将空三成果导入inpho影像处理系统中,创建多角度立体模型,对立体模型进行同名像点密集匹配生成dsm,对dsm进行点云滤波,初步去除植被及建筑物等处的点,使高程贴合自然地表;
[0172]
(2)dem人工编辑:对滤波后的dsm数据进行人工检查、编辑,进一步去除局部未过滤完全的非地面高程点,生成dem成果;
[0173]
(3)正射纠正、匀光匀色及镶嵌编辑:利用人工编辑后的dem成果和导入的空三成果对原始影像进行数字微分纠正;
[0174]
对纠正后的影像进行色彩、亮度和对比度的调整和匀色处理。匀色处理应缩小影像间的色调差异,使色调均匀,反差适中,层次分明,标尺地物色彩不失真,不应有匀色处理的痕迹;
[0175]
对匀色后影像进行融合镶嵌,对镶嵌线分割建筑物或各类线状地物等问题进行人工编辑处理,镶嵌线避开大型建筑物、桥梁人工设施,确保地物影像完整性、无明显拼接痕迹,过度自然,纹理清晰,避免建)筑物出现反向、压盖、交错现象;
[0176]
(4)分幅裁切:对镶嵌完成后的影像按照1:500地形图分幅要求进行裁切,分幅范围线外扩图上1cm;
[0177]
(5)图面修复:对分幅影像数据进行检查,检查影像的清晰度,色彩鲜明度及色调均匀度,影像色彩的真实性并对dem编辑无法解决的影像变形问题进行修复对;于大面积涉水区域,利用影像处理软件处理,使图幅影像完整;
[0178]
(6)元数据制作:元数据以图幅为单位,制作坐标系参数,航摄分辨率、航摄时间信息;
[0179]
(7)质量检查。
[0180]
在一个实施例中,在步骤五中,缩编方法包括:
[0181]
(1)缩编后的数据分层、要素代码以及数据层属性结构按要求执行;
[0182]
(2)要素属性保留1∶500dlg要素的属性;
[0183]
(3)各类要素缩编的综合取舍标准按照要求执行;
[0184]
(4)按1∶2000分幅范围对1∶500数据进行分块;
[0185]
(5)将已分块的1∶500dlg数据按1∶2000范围进行拼接、融合,生成1∶2000缩编底图;
[0186]
(6)要素的缩编采集按先后顺序进行;
[0187]
(7)等高线按1m等高距进行选取,高程点按要求选取;
[0188]
(8)地物缩编掌握要素综合取舍的原则,对居民地、水网、路网、街道、岛屿、地理名称、注记大小要素进行综合取舍、化简缩编作业。
[0189]
实施例
[0190]
本发明实施例提供的基于点云融合的行车场景识别系统,通过以下实施步骤以及相关指标、规则进行构建
[0191]
1.主要技术指标
[0192]
1.1坐标系统
[0193]
坐标系统采用2000国家大地坐标系。
[0194]
1.2投影及分带
[0195]
采用高斯-克吕格投影,3
°
分带,中央经线117
°
00
′
,投影面为参考椭球面。
[0196]
1.3高程基准
[0197]
采用1985国家高程基准。
[0198]
1.4分幅与编号
[0199]
dlg、dom采用矩形分幅(50cm
×
50cm),图号按图廓西南角坐标km数编号,x坐标km数在前,y坐标km数在后,中间加英文字符
“‑”
连接,1∶500比例尺分幅编号取至0.01km;1∶2000比例尺分幅编号取至0.1km。
[0200]
1.5数据基本指标
[0201]
(1)数字正射影像图
[0202]
dom地面分辨率为0.05m,数据格式为geotiff格式(加定位文件*.tfw),采用1∶500分幅。元数据采用microsoftofficeexcel的xls格式
[0203]
(2)数字线划图
[0204]
1:500、1:2000地形图成果提供两种数据格式,分别为数据库格式和制图数据。数
据库采arcgis的mdb格式,制图数据采用autocad的dwg格式,采用1∶500、1∶2000分幅。1:500地形图等高距为0.5m,1:2000地形图等高距为1.0m。
[0205]
1.6成果精度要求
[0206]
(1)数字正射影像图
[0207]
数字正射影像图明显地物点的平面位置中误差不大于0.3m。平面位置中误差的两倍为其最大误差,图幅接边误差不大于2个像元。
[0208]
(2)1:500地形图
[0209]
图上地物点对邻近野外控制点的平面位置中误差不大于0.3m,高程注记点对邻近野外控制点的高程中误差不大于0.2m,等高线对邻近野外控制点的高程中误差不大于0.25m,特殊困难地区(大面积植被覆盖、乱掘地、采沙场等)的中误差可相应放宽0.5倍。
[0210]
1.7航摄技术指标
[0211]
(1)航摄平台
[0212]
无人机飞行器航摄系统的飞行平台的续航时间须大于1.5h;具备4级风力气象条件下安全飞行的能力;导航定位gps应具备差分定位或精密单点定位来解算实际曝光点坐标的能力。
[0213]
(2)数码相机
[0214]
相机镜头应为定焦镜头,且对焦无限远;应具有精确的相机检校参数:主点坐标、主距和畸变差方程系数,主点坐标中误差不应大于10μm,主距中误差不应大于5μm,经过畸变差方程式及测定的系数值拟合后,残余畸变差不应大于0.3像素。
[0215]
本发明需采用固定翼无人机载摄影数码航摄仪。
[0216]
(3)航摄计划和航摄设计
[0217]
1)地面分辨率应小于5cm。
[0218]
2)在规定的航摄期限内,选择地表植被及其它覆盖物对成图影响较小、云雾少、无扬尘(沙)大气透明度好的时间段进行摄影。航摄时,即要保证具有充足的光照度,又要避免过大的阴影。航摄时间应根据下表规定的摄区太阳高度角和阴影倍数执行,详见表1。
[0219]
表1摄区太阳高度角和阴影倍数对照表
[0220]
地形类别太阳高度角/(
°
)阴影倍数/倍平地>20<3丘陵地和一般城镇>25<2.1山地和大中城市≥40≤1.2
[0221]
(4)飞行质量
[0222]
1)航线一般按东西向平行于图廓线飞行,特定条件下亦可作南北向飞行或沿线路、河流、海岸、境界等方向飞行。
[0223]
2)航向重叠度一般应为:60%~80%;旁向重叠度一般应为:15%~60%;像片倾角一般不大于5
°
,最大不超过12
°
;像片旋角一般不大于15
°
,最大不超过30
°
。
[0224]
3)航向覆盖超出摄区边界线不应少于两条基线,旁向覆盖超出摄区边界线一般应不少于相符的50%。
[0225]
4)同一航线上相邻像片的航高差不应大于30m,最大航高与最小航高之差不应大于50m,实际航高与设计航高之差不应大于50m。
[0226]
(3)影像质量
[0227]
1)影像应清晰,层次丰富,反差适中,色调柔和,应能辨认出与地面分辨率相适应的细小地物影像,能够建立清晰的立体模型。
[0228]
2)影像上一般不应有云、烟、大面积反光、污点等缺陷。
[0229]
3)确保因飞行器速度的影响,在曝光瞬间造成的像点位移一般不应大于1个像素,最大不应大于1.5个像素。
[0230]
4)拼接影像应无模糊、重影和错位现象。
[0231]
1.8其他技术指标
[0232]
(1)dlg数据分层及属性结构
[0233]
dlg要素分43个数据层进行存储,包括点层20个(其中注记点层8个),线层13个,面(多边形)层10个。数据层采用4个英文字母进行命名,前3个字母为数据层内容英文简写,第4个字母代表数据层几何类型,为“p”、“l”、“a”,分别代表“点”、“线”、“面”。
[0234]
(2)要素代码
[0235]
dlg数据分类代码前6位与国家标准一致,并在其基础上扩充了1位。
[0236]
2.设计方案
[0237]
2.1软件和硬件配置要求
[0238]
2.1.1软件
[0239]
表2主要软件投入情况
[0240]
序号设备名称数量用途1inpho影像处理系统1套空三加密、dom制作2ept1套dom裁剪、分幅3南方cass软件40套dlg编辑、缩编、质量检查等4eps20套dlg数据采集、编辑等5arcgis10套数据入库、拓扑检查等6office系列办公软件5套技术文档编制
[0241]
2.1.2硬件设备
[0242]
表3主要硬件设备投入情况
[0243]
序号设备名称数量用途1无人机摄影系统1套影像获取2gps接收机20台像控点测量、地物补测、高程点测量等3全站仪10台地物补测、高程点测量等4计算机50台数据生产5绘图仪2台图纸喷绘6打印机3台文件打印等7车辆10辆交通出行
[0244]
所用的gps-rtk、全站仪等主要测绘仪器应经过国家计量部门检定合格,且仪器检定证书在有效期内。
[0245]
2.2技术路线及工艺流程
[0246]
本发明采用航空摄影测量的方法进行作业,以固定翼无人机搭载大画幅数码相机
进行测区影像获取,形成空三加密和dom成果,在上述成果的基础上完成dlg数据的生产和更新、数据库建库和挂图制作等工作。本发明实施例提供的点云融合的行车场景构建方法总体技术路线如图2。
[0247]
2.2.1航空摄影
[0248]
拟采用运纵横cw-15电动垂直起降无人机搭载飞思1亿像素数码相机进行航空影像数据获取,影像数据经数据格式转换、畸变纠正后,利用inpho影像处理系统进行空三加密工作,其技术路线如图3。
[0249]
2.2.1.1航摄设备
[0250]
(1)纵横cw-15无人机
[0251]
纵横cw-15无人机是一款电动垂直起降无人机,在飞行安全性、系统可靠性、操作便捷性、飞行卓越性等方面得到了时间的检验,其具有续航时间长、稳定性高、安全可靠的特点,具体参数如下表4.
[0252]
表4纵横cw-15无人机参数
[0253]
机身长度2.06m翼展3.54m最大起飞重量17kg无线电链路范围35kmdgpsrtk/ppk任务载荷≤3kg续航时间180分钟巡航速度61km/h抗风能力6级实用升限6500m最高起飞海拔4500m起降方式垂直起降
[0254]
(2)飞思ixm-100mp相机
[0255]
飞思ixm-100mp是一款专为无人机成像设计的广角中画幅航摄相机,具有重量轻、幅面大、成像质量高德特点。详细参数见下表5。
[0256]
表5飞思ixm-100mp参数
[0257][0258]
[0259]
2.2.1.2控制点布设和测量
[0260]
(1)像控点选点条件
[0261]
1)像控点应均匀布设在航带间重叠位置,对地形变化复杂和测区边界转折区域可适当加密控制点个数。
[0262]
2)像控点的目标影像应清晰,易于辨别的明显地物点(如交点、角点、点状地物中心等)。
[0263]
3)像控点位置应易于准确定位和量测。
[0264]
4)弧形地物及阴影等不应选作为点位目标。
[0265]
5)对于选点位置附近无明显地物的,喷涂测量标志,测量标志以“对三角”为宜。
[0266]
6)像控点位置应远离高树、高楼、高压线、水面等对gps信号影响较大的地方。
[0267]
(2)像控点布设
[0268]
根据无人机定位、行车方位精度和飞思ixm-100mp相机的特点,以及成果精度要求,控制点按间距约1km一个在测区均匀布设,并需布设一定数量的检查点。
[0269]
(3)像控点测量
[0270]
像片控制点一般采用基于sdcors网络rtk测量法测定,每个点需测两个测回,每个测回观测不少于10个历元,两测回互差,x和y方向上不大于2cm,在方向上不大于3cm。
[0271]
2.2.1.3航线敷设
[0272]
根据精度要求、设备性能和空域申请情况综合分析,影像地面分辨率定位4cm,航向重叠度为80%,旁向重叠度为60%,相对行高370m。
[0273]
测区位于某区城区及其周边,地势平坦,最高点海拔35m,最低处海拔23.5m,侧区内地形高差不大于六分之一摄影航高,不再进行分区划定,整个测区按一个分区进行航线设计,采用定高飞行,行高400m,航线按东西向进行敷设。
[0274]
2.2.1.4飞行实施
[0275]
(1)飞行前需确认天气情况,要求天气晴朗,光照充足,风力一般不大于4级。
[0276]
(2)飞行前应进行设备和相机曝光检查,确保设备安装和参数设置正确,确保飞行安全。
[0277]
(3)飞行完毕后需进行数据检查,确保影像清晰明亮,相机曝光无误,无航摄漏洞
[0278]
2.2.1.5空三加密
[0279]
空三加密使用inpho影像处理系统,原始数据经过数据格式装换、畸变差纠正后导入inpho软件,经过连接点提取、控制点刺点、平差调整后形成空三加密成果。
[0280]
空三加密成果精度按照相对定向精度不应大于表6的规定,特别困难地区可放宽0.5倍。
[0281]
表6相对定向精度
[0282][0283][0284]
绝对定向精度,基本定向点残差限值为加密点中误差的0.75倍,检查点误差限值为加密点中误差的1.25倍,公共点较差限值为加密点中误差的2.0倍,具体见表7。
[0285]
表7基本定向点残差、检查点误差及区域网间公共点较差最大限值
[0286][0287]
2.2.2dom制作
[0288]
dom制作流程:在空三加密成果的基础上,通过dsm匹配、点云滤波、dem人工编生成dem成果,再经过影像数字微分纠正、匀光匀色、镶嵌编辑、分幅裁切、图面修复、元数据制作等生成dom成果。
[0289]
(1)dsm匹配和点云滤波
[0290]
将空三成果导入inpho影像处理系统中,创建多角度立体模型,对立体模型进行同名像点密集匹配生成dsm,对dsm进行点云滤波,初步去除植被及建筑物等处的点,使其高程贴合自然地表。
[0291]
(2)dem人工编辑
[0292]
对滤波后的dsm数据进行人工检查、编辑,进一步去除局部未过滤完全的非地面高程点,生成dem成果。
[0293]
(3)正射纠正、匀光匀色及镶嵌编辑
[0294]
利用人工编辑后的dem成果和导入的空三成果对原始影像进行数字微分纠正。
[0295]
对纠正后的影像进行色彩、亮度和对比度的调整和匀色处理。匀色处理应缩小影像间的色调差异,使色调均匀,反差适中,层次分明,标尺地物色彩不失真,不应有匀色处理的痕迹。
[0296]
对匀色后影像进行融合镶嵌,对镶嵌线分割建筑物或各类线状地物等问题进行人工编辑处理,镶嵌线应尽量避开大型建筑物、桥梁等人工设施,确保地物影像完整性、无明显拼接痕迹,过度自然,纹理清晰,尽量避免建(构)筑物出现反向、压盖、交错等现象。
[0297]
(4)分幅裁切
[0298]
对镶嵌完成后的影像按照1:500地形图分幅要求进行裁切,分幅范围线外扩图上1cm。
[0299]
(5)图面修复
[0300]
对分幅影像数据进行检查,检查影像的清晰度,色彩鲜明度及色调均匀度,保证影像色彩的真实性并对dem编辑无法解决的影像变形问题进行修复。对于大面积涉水区域,需利用影像处理软件处理,保证图幅影像完整。
[0301]
(6)元数据制作
[0302]
元数据以图幅为单位填写,元数据的内容见附表4。主要填写成果的坐标系参数,航摄分辨率、航摄时间等相关信息,由作业人员及检查人员进行填写。
[0303]
(7)质量检查
[0304]
1)影像数学基础、地面分辨率、数据覆盖范围的正确性。
[0305]
2)影像质量(如色彩、色调、纹理、有无空洞变形等)及相关附件的规范性。
[0306]
3)影像平面接边精度是否满足技术要求。
[0307]
2.2.31:500dlg产品生产
[0308]
2.2.3.1技术路线
[0309]
本测区采用数字摄影测量,先内后外测图的方法进行1:500dlg数据的生产,dlg生产技术流程如图4所示。
[0310]
2.2.3.2基本要求
[0311]
(1)数据按内业定位,外业定性的原则进行采集。
[0312]
(2)利用空三加密成果,建立立体模型。
[0313]
(3)在立体模型下根据立体进行定位采集。
[0314]
(4)将内业采集的矢量数据制作外业调绘底图。
[0315]
(5)外业到实地进行核查、补测和纠错,同时进行地理要素性质调绘,将结果标绘在外业调绘底图上交回内业。
[0316]
(6)内业在立体模型下根据外业的调绘成果进行纠错性和补充性采集。
[0317]
2.2.3.3立体测图
[0318]
应正确表示水系及附属设施、居民地和垣栅、工矿建(构)筑物及其他设施、交通及附属设施、管线及附属设施、地貌和土质、植被等。
[0319]
各类要素的表示方法和取舍原则,下列各条未作规定的,均按《规范》、《图式》规定执行。
[0320]
(1)水系与附属设施的测绘
[0321]
1)河流、水库、池塘、沟渠、泉、井等及其它水利设施均应准确测绘,泉是有向点符号,要注意测绘方向。
[0322]
2)正确表示河流、湖泊、水库、池塘及沟渠相互间的关系。
[0323]
3)河流、水库、池塘的水涯线按摄影时的影像表示。
[0324]
4)河流、沟渠宽度小于图上0.5mm时,用单线符号表示。
[0325]
5)摄影时无水的时令河需测注河床高程;堤、坝应测注顶部及坡脚高程;泉、井应测注泉的出口与井台高程。
[0326]
6)多孔水闸不能逐个表示时,可在适当位置配置符号,并加注闸门孔数。
[0327]
7)注意溢洪道的表示,当实地溢洪道与下游的沟渠或河道不连接时,图上不应强行连接。溢洪道底部和堤坝顶部要测高程值。
[0328]
(2)居民地及设施的测绘
[0329]
1)居民地因多数房屋需要改正房檐,测标可按房檐外边沿测量,并如实反映建(构)筑物特征。
[0330]
a.其外轮廓凸凹在图上小于0.4mm,简单房屋小于0.6mm时,可用直线连接。
[0331]
b.当同一幢楼房层次不同时应分割表示。
[0332]
c.临时性的建筑物、院落内的临时性房屋可不表示。
[0333]
d.宽度大于图上1mm的楼房阳台均应表示;已封闭且落地的阳台,与楼房一起表示。
[0334]
e.图上宽度小于1mm的室外楼梯不表示;台阶不足图上三级符号的不表示。农村居民地院内的台阶和楼梯可不表示。
[0335]
f.门顶、雨罩、门廊图上小于3mm
×
4mm的可不表示。
[0336]
g.门墩按图式规定表示,院门不用表示。
[0337]
i.地下建筑物(地下室、防空洞、停车场等)出入口、通风口和天窗均均按图式规定表示。
[0338]
j.柱廊宽度小于图上1.5mm的按1.5mm表示。
[0339]
k.廊房、飘楼均应表示。檐廊、挑廊宽度小于图上1.0mm可不表示。
[0340]
l.正规、固定的各类车棚用棚房符号表示,简陋、临时性的不表示。
[0341]
2)垣栅的测绘
[0342]
a.栅栏、栏杆一般以端点或拐点的中心为准采集;依比例尺的围墙以外边线(外拐点)为准采集。
[0343]
b.凡围墙墙基厚度小于图上0.6mm的均用不依比例尺符号表示。
[0344]
3)各类设施的测绘
[0345]
工矿建(构)筑物及其他设施的测绘,图上应准确表示其位置、形状、特征和性质。依比例尺表示的工矿建筑物应实测其外部轮廓,按《图式》要求配置相应的依比例尺符号表示;不依比例尺表示的,应准确测绘其定位点或定位线,用相应的不依比例尺符号表示。
[0346]
a.点状要素采集时,应正确判定点位几何中心和方向;要注意有向线状符号采集时符号生成的方向。
[0347]
b.小型单柱广告牌不表示。大型单柱广告牌不论顶部形状如何,统一用《图式》1.3.132b符号表示。
[0348]
c.跨越道路的彩门状广告牌,用彩门符号表示,支柱按实际个数绘出。
[0349]
d.路灯只表示桥梁、公路、城区街道、广场等处的,单位院内的路灯、夜间照射楼宇的射灯均不表示。
[0350]
(3)交通及附属设施的测绘
[0351]
1)铁路与公路或其他道路平面相交时,铁路不断,公路间断表示。
[0352]
2)立交桥或高架路的测绘应表示桥位、匝道与绿地等要素;多层交叉重叠时应准确表示其投影关系,上层保持完整。匝道连接及出入口应表示明确。
[0353]
3)宽度2m以上路面没有铺修或者经过简易铺修,没有路基,采集为机耕路,依比例尺表示,若实地宽窄不一且变化频繁时,可取中等宽度表示为平行线。
[0354]
4)路堤、路堑应按实际宽度绘出边界。
[0355]
5)公路通过居民地不中断,保持公路的连续性。
[0356]
(4)管线及附属设施的测绘
[0357]
1)电杆、电线架、电线塔按照实地位置测量,不应有移位。
[0358]
2)架空的、地面上的、有管堤的各类管道均应实测,并用相应的符号。管线支架转折处要求实测支架位置,直线部分支架密集时支架可适当取舍。
[0359]
3)各类检修井及污水篦子,内判采集主要管线、主要街道上的,其他地方检修井和污水篦子均不表示,不能判定检修井性质时以不明用途检修井表示
[0360]
(5)地貌的测绘
[0361]
自然地貌以等高线和高程注记表示为主;陡坎和其他特殊地貌辅以相应符号配合表示。
[0362]
1)当路堤、路堑、陡坎、斜坡、陡岸和梯田坎比高大于1m时应测注顶部和底部高程
注记点;
[0363]
2)乱掘地、施工区、采石场内宜用高程点表示,一般情况下不表示等高线。
[0364]
3)居民区、经人工设计、规整改造过的花坛等绿化区域内不表示等高线。
[0365]
4)无水水渠应测注渠顶边和渠底高程,有水水渠应测注水面高程;时令河应测注河床高程;堤坝应测注顶部及坡脚高程;池塘应测注塘顶边及塘底高程;泉、井应测注泉的出水口与井台高程。
[0366]
(6)植被的测绘
[0367]
1)图上应正确反映植被的类别特征和分布范围。大面积分布的植被在能表达清楚的情况下,可采用图外附注说明。
[0368]
2)固定的种植蔬菜、瓜果、花卉的房屋或棚房用《图式》1.3.38“温室、大棚”符号表示,并注记产品名称。临时性简易的塑料大棚可不测绘,按产品种类分别用菜地、经济作物地表示,在其范围内注记产品名称。
[0369]
(7)地形图上各种要素配合表示要求
[0370]
1)当两个地物中心重合或接近时,可将重要的地物准确表示,次要地物移位0.3mm表示。
[0371]
2)当建筑物与陡坎、斜坡边线重合时,两条线要重复采集;当建筑物与陡坎、斜坡边线接近时,可将陡坎或斜坡移位0.3mm表示。
[0372]
3)水涯线与陡坎、加固岸重合时,两条线要重复采集;水涯线与坡脚线重合时,应在坡脚处测绘水涯线。
[0373]
(8)在立体模型下只采集能看到的要素,被阴影遮盖的地方可不采集,但应进行必要标注,待外业调绘时补测。
[0374]
(9)像对之间dlg数据必须在立体模型中进行连接。
[0375]
(10)加强立测数据的质量检查,每个像对测图完成后,要由生产部门检查员在立体环境下进行检查,并记录签字。
[0376]
(11)输出调绘工作底图
[0377]
将dlg采集数据经过初步编辑,制作外业调绘底图。外业调绘介质可以是纸图,也可以是平板电脑。
[0378]
2.2.3.4外业调绘
[0379]
(1)基本要求
[0380]
调绘应判读准确、描绘清楚、图式运用恰当、注记准确;调绘人员应坚持“走到、看到和问到”的原则;应在野外对航测内业成图进行全面实地检查、修测、补测、地理名称调查注记、房檐改正等工作。
[0381]
实地调绘前应对内业判绘的数据进行分析,做好内外业技术上的沟通,以保证地形图要素(包括图形要素和属性信息)表达的完整性和正确性。
[0382]
1)对内业预判的地形图要素进行核查、纠错、定性,对内业漏测和难以准确判绘的图形信息(如遮盖区域)和无法获取的属性信息(如地理名称等)进行调绘。
[0383]
2)对影像清晰内业漏测的地物不必补测,直接在图上标绘。
[0384]
3)对主要街道被遮挡的地物补测、标绘。
[0385]
4)调绘房檐宽度。
[0386]
5)对各类检修井进行定性。
[0387]
6)外业清绘除地类界可使用简化符号外,其它按《图式》规定的符号(符号大小、线粗)清绘;面积较大植被范围线内可配置1-2个相应符号加文字说明表示。
[0388]
7)对于地物性质可采用符号化表示或者注记表示,如对于内业量测的不明线,外业确定后,可标注文字注记,不必再绘制符号表示,但文字注记应标注清楚,做到与地物一一对应。
[0389]
8)调绘时间、作业员姓名、检查员姓名应记录清晰。
[0390]
(2)外业调绘具体要求
[0391]
1)居民地及附属设施应符合下列要求:
[0392]
a.建筑物应逐幢表示;不同建筑结构、不同层数的建筑物应分别表示;高层建筑形式多样,测绘分层线(不同层次的分界线)有困难时,可不绘分层线(仅注最高层数)。
[0393]
b.围墙宽度小于图上0.6mm的以不依比例尺表示。
[0394]
c.围墙与街道边线重合或间距在图上小于0.3mm,只表示围墙符号。
[0395]
d.建筑物轮廓以墙基外角为准,以外墙勒脚以上(100cm
±
20cm)处为测点;柱廊以柱外围为准;檐廊以外轮廓投影为准;架空通廊以外轮廓水平投影为准;门廊以柱或围护物外围为准;独立柱的门廊以顶盖投影为准;挑廊以外轮廓投影为准;阳台以底板投影为准;门墩以墩外围为准。
[0396]
e.门顶以顶盖投影为准;室外楼梯和台阶以外围水平投影为准。其它各种建筑物按落地为实、投影为虚的原则测量及表示。
[0397]
f.屋檐宽度大于图上0.2mm时,应在像片的相应处注明宽度(量注至cm),供内业进行屋檐宽度改正。
[0398]
g.建筑物轮廓凹凸在图上小于0.4mm,简单房屋小于0.6mm时,可直接连线;图上面积小于16mm2的简易房、棚房可舍去。
[0399]
h.临时性的活动房屋、施工时搭建的临时工棚(房)及材料棚等可不表示。
[0400]
i房屋层数是指房屋的总层数,房屋总层数包括房屋地上层数和房屋地下层数。采光窗在室外地坪以上的半地下室,其室内层高在2.20m以上的计入层数;楼梯间、电梯机房、水箱间以及装饰性塔楼等附属于楼顶的建筑,层高不低于2.80m时应计入总层数;复式房屋、跃层建筑按实际占有的自然层数计算;独立的车库、配电房、水泵房、垃圾站等单层建筑物按一层计算。
[0401]
j.单层房屋只标注房屋结构;悬空房屋的楼层数,按照其实际包含层数标注;建筑中的房屋和破坏房屋均不标注房屋层数。
[0402]
k.地下室、化粪池可选择表示。
[0403]
2)工矿建(构)筑物及其他设施应符合下列要求:
[0404]
a.露天采掘场范围应表示。
[0405]
b.依比例尺的塔形建筑物及水塔的建筑基部轮廓应表示。
[0406]
c.简易、临时、低矮的温室、菜窑、花房可不表示。
[0407]
d.单位的大型名称标牌和柱式独立大型广告牌应表示。
[0408]
e.街道、公园、小区、幼儿园内设有文体娱乐设施的场所,应调绘其范围线。
[0409]
3)交通及附属设施应符合下列要求:
[0410]
a.公路应调注技术等级代码及其行政等级代码和编号,有名称的应加注名称;公路、街道宜按其铺面材料分别以砼、沥、砾、石、砖等注记,铺面材料改变处,应用地类界用符号分开。
[0411]
b.道路通过居民地以街道表示。
[0412]
c.高速公路、铁路、轨道交通应绘出两侧围建的栅栏、墙和出入口,并应注明名称,中央隔离带应表示。
[0413]
d.市区街道应将车行道、过街天桥、过街地道的出入口、分隔带、环岛、街心花园、人行道与绿化带等绘出。
[0414]
e.各类道路的收费站应表示;红绿信号灯、测速和摄像机站只表示主要街道上的。
[0415]
4)管线及附属设施应符合下列要求:
[0416]
a.永久性的电力线、电信线均应准确表示,电杆、铁塔位置应测定。当多种线路在同一杆架上时,可仅表示主要的,各种线路应做到线类分明,走向贯通。
[0417]
b.10kv以上的电力线以输电线表示,以下的电力线以配电线表示。输电线和配电线均应表示,但380/220v配电线进入企事业单位、居民小区、农村居民地、步行巷道而不再向另处贯通的,以及路灯电线、灯箱电线和交通信号灯电线等不表示。
[0418]
c.管径大于等于50mm的架空管线、电力(通讯)线入地口、配电箱均应表示。
[0419]
d.各类检修井及污水篦子,只表示主要街道上的。
[0420]
e.消防设施均应表示,阀门只表示主要街道上的。
[0421]
5)水系及附属设施应符合下列要求:
[0422]
a.水岸线以摄影时影像为准调绘,池塘、水渠等应以坎边为准。
[0423]
b.水渠应测沟渠内侧上边缘线,高出地面0.5m的土堤应测绘。
[0424]
c.境界表示到乡镇界,以收集到的资料为参考进行核实。
[0425]
6)植被应符合下列要求:
[0426]
a.地砖表面种植草皮的绿化地应表示。
[0427]
b.古树名木应按独立树测绘,并加注“古树”两字。植物园、保护区等茂密区内的古树可择要表示。
[0428]
c.种植小麦、杂粮、棉花、烟草、大豆、花生和油菜等的田地应配置旱地符号,有节水灌溉设备的旱地应加注“喷灌”、“滴灌”等。
[0429]
d.经济作物、油料作物等应加注品种名称。
[0430]
e.一年分季种植不同作物的耕地,应以夏季主要作物为准配置符号表示。
[0431]
f.稻田里在图上宽度大于1mm的田埂应表示,旱地里的田埂宽度大于1mm的与主要道路连接的表示为小路或机耕路,其余的不表示。
[0432]
7)注记应符合下列要求:
[0433]
a.行政区域、机关、企事业单位、街道只标注法定名称,但居住区、桥梁、河流、山岭和名胜古迹等还可加注习惯名称,习惯名称用加圆括号表示。
[0434]
b.各种名称、说明注记和数字注记应准确注出;所有居民地、道路、山岭、沟谷、河流等自然地理名称,以及主要单位等名称,均应调查核实。
[0435]
(3)外业补测具体要求
[0436]
1)外业补测内容包括遮挡地物和新增地物补测。
[0437]
补测采用gps网络rtk或单基站rtk方式,当gps信号较弱时可施测部分图根点采用全站仪进行补测,相关作业方法及技术要求执行ch/t2009-2010《全球定位系统实时动态测量(rtk)技术规范》、gb/t14912-2005《1∶5001∶10001∶2000外业数字测图技术规程》规定。
[0438]
2)对于零星新增地物或单个建(构)筑物可根据相关地物丈量定位,对于大面积新增地物采用全野外数字测图方法。
[0439]
(4)高程注记点外业采集
[0440]
本发明所有图幅应由外业施测部分高程注记点,主要技术要求如下:
[0441]
1)外业按图上每dm24~6个的密度测注高程注记点。
[0442]
2)铁路、公路、简易公路、大车路、城区主要街道中心,图上每隔10cm~15cm应实测高程注记点。桥梁、道路交叉口、独立地物应外业实测高程注记点。
[0443]
3)高程注记点的高程中误差≤
±
0.1m。
[0444]
4)高程点的采集主要是利用rtk测量的作业方法进行,当gps的信号弱,采集数据的精度达不到规范的要求时,采用全站仪的方法进行采集。
[0445]
2.2.3.5二次立体测图
[0446]
导入外业高程注记点,加测适量高程点满足dlg成图密度需要,采集等高线,同时依据外业调绘资料,补测、完善形成完整的dlg立体采集成果。
[0447]
首先在立体下检查外业实测的高程点是否正确、合理,对明显不合理、有错误的点应认真检查原因,作出处理,然后立体量测注记点,每dm28~15个(含外业实测高程注记点),应切读两次,读数较差一般不大于0.2m,取中数为最终值。
[0448]
2.2.3.6建库编辑
[0449]
利用二次立体采集后的数字线划图立测数据,依据外业调绘成果,通过图形编辑、属性编辑、拓扑关系构建等编辑制作符合建库要求的数字线划图数据。
[0450]
dlg数据编辑规定要求如下:
[0451]
(1)按要素分类对要素实体以点、线、面以及注记方式进行图形编辑,赋相应的分类代码及必要的属性项值,并按要求分层存放。
[0452]
(2)有向点要素按正北方向逆时针确定其方位角;有向线要素按前进方向符号左侧生成。
[0453]
(3)依据图式和建库数据的要求,按照综合取舍的原则进行数据编辑,做到不失真、不遗漏,主次有别,层次分明;消除定位错误、拓扑错误、图层错误、属性错误等。
[0454]
(4)线要素实交处应采取捕获方式,尽可能不出现悬挂点,面要素应采用必要的辅助线进行封闭构面。
[0455]
(5)消除要素的图形遗漏、属性遗漏、注记遗漏等。
[0456]
(6)消除要素间相互矛盾、线条不平滑等不合理现象。
[0457]
(7)适当编辑等高线,等高线遇坎、斜坡可断开,当连续表示时应与坎、斜坡无地理适应性矛盾。
[0458]
(8)dlg相邻图幅之间应进行接边处理,形成一体化无缝数据库。
[0459]
a.相邻图幅之间对同一要素进行接边,做到位置正确、形态合理、属性一致。
[0460]
b.位置接边,同一要素应在图廓线处相互接边,实交于一点。
[0461]
c.形态接边,同一要素接边后应保持合理的几何形状,如输电线路、道路、等高线、
水岸线等不应在接边处出现转折。
[0462]
d.属性接边,同一要素接边后应保证属性完全一致。
[0463]
e.接边处相互位置偏差大于限差,应分析原因,排除粗差后再作处理。
[0464]
2.2.41:2000dlg缩编
[0465]
2.2.1.1dlg缩编流程图如图5所示。
[0466]
2.2.1.2各工序技术规定
[0467]
以新测制的1∶500dlg数据为基础,缩编为1∶2000dlg数据。基本要求及缩编流程如下:
[0468]
(1)缩编后的数据分层(表7)、要素代码以及数据层属性结构、执行。
[0469]
(2)要素属性保留1∶500dlg要素的属性。
[0470]
(3)各类要素缩编的综合取舍标准按照《图式》要求执行。
[0471]
(4)按1∶2000分幅范围对1∶500数据进行分块。
[0472]
(5)将已分块的1∶500dlg数据按1∶2000范围进行拼接、融合,生成1∶2000缩编底图。
[0473]
(6)要素的缩编采集一般按有利于要素关系协调的先后顺序进行,如:地貌、水系、交通(铁路、公路、街道及其他道路)、居民地与建(构)筑物、管线、境界、植被和土质、其他要素等。
[0474]
(7)等高线按1m等高距进行选取,高程点按要求选取。
[0475]
(8)地物缩编掌握要素综合取舍的原则,对居民地、水网、路网、街道、岛屿、地理名称、注记大小等要素进行综合取舍、化简等缩编作业,保证关系表达的合理性与一致性。必要时可将缩编底图输出,在输出图上按照要求进行标描后,进行缩编采集。
[0476]
所属领域的技术人员可以清楚地了解到,为了描述的方便和简洁,仅以上述各功能单元、模块的划分进行举例说明,实际应用中,可以根据需要而将上述功能分配由不同的功能单元、模块完成,即将所述装置的内部结构划分成不同的功能单元或模块,以完成以上描述的全部或者部分功能。实施例中的各功能单元、模块可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中,上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。另外,各功能单元、模块的具体名称也只是为了便于相互区分,并不用于限制本发明的保护范围。上述系统中单元、模块的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
[0477]
二、应用实施例:
[0478]
本发明实施例还提供了一种计算机设备,该计算机设备包括:至少一个处理器、存储器以及存储在所述存储器中并可在所述至少一个处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任意各个方法实施例中的步骤。
[0479]
本发明实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时可实现上述各个方法实施例中的步骤。
[0480]
本发明实施例还提供了一种信息数据处理终端,所述信息数据处理终端用于实现于电子装置上执行时,提供用户输入接口以实施如上述各方法实施例中的步骤,所述信息数据处理终端不限于手机、电脑、交换机。
[0481]
本发明实施例还提供了一种服务器,所述服务器用于实现于电子装置上执行时,
提供用户输入接口以实施如上述各方法实施例中的步骤。
[0482]
本发明实施例提供了一种计算机程序产品,当计算机程序产品在电子设备上运行时,使得电子设备执行时可实现上述各个方法实施例中的步骤。
[0483]
所述集成的单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明实现上述实施例方法中的全部或部分流程,可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一计算机可读存储介质中,该计算机程序在被处理器执行时,可实现上述各个方法实施例的步骤。其中,所述计算机程序包括计算机程序代码,所述计算机程序代码可以为源代码形式、对象代码形式、可执行文件或某些中间形式等。所述计算机可读介质至少可以包括:能够将计算机程序代码携带到拍照装置/终端设备的任何实体或装置、记录介质、计算机存储器、只读存储器(read-onlymemory,rom)、随机存取存储器(randomaccessmemory,ram)、电载波信号、电信信号以及软件分发介质。例如u盘、移动硬盘、磁碟或者光盘等。
[0484]
以上所述,仅为本发明较优的具体的实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1