一种基于超声波空化效应的触觉再现可穿戴装置及其触觉再现模拟方法
1.本发明涉及触觉反馈技术领域,特别涉及一种基于超声波空化效应的触觉再现可穿戴装置及其触觉再现模拟方法。
背景技术:
2.当今最流行的沉浸式虚拟现实技术是虚拟现实技术的一种,体验者佩戴头戴显示设备,通过触觉反馈等人机交互形式,配合视觉、听觉等感觉诱导,获得具有沉浸感的虚拟现实体验。
3.现有的虚拟现实产品的功能大多是在视觉和听觉反馈上,随着人机交互技术的发展,人们已不能满足于单一的感觉反馈而追求高维度的反馈和交互技术。著名心理学家赤瑞特拉treicher通过大量实验得出结论:人类通过自身感官获取信息,其中83%的信息来自视觉,11%的信息来自听觉,3.5%的信息来自嗅觉,1.5%的信息来自触觉,1%的信息来自味觉。为了提高虚拟现实的体验感,触觉反馈技术尤其重要,触觉反馈技术的突破也成为了虚拟现实技术的发展方向。触觉反馈技术是虚拟现实技术发展的必经之路,也是增强虚拟现实体验真实感的有效途径。触觉反馈技术可通过力反馈、振动反馈等方式为用户创造触感,在虚拟世界与用户之间的视觉、听觉通道上增加触觉通道,创造出体验感真实的虚拟环境,实现真正的高维度人机交互。
4.现有的触觉反馈穿戴装置大多采取对手指产生制动效果从而产生力反馈,如做成外骨骼式触觉力反馈穿戴装置,这种力反馈穿戴装置的驱动方式可以采用气动驱动,气动驱动的优点是直接对手指施加力的作用,省去了传动装置,使结构更加紧凑、轻便;电机驱动也是力反馈穿戴装置的比较受欢迎的驱动方式,电机通过传动装置可以制动手指的任意关节,提供力反馈,模拟出抓握效果;以磁流变液为驱动方式的力反馈设备也可以提供力反馈效果,磁流变液在磁场的作用下会改变屈服强度从而产生对手部的反馈力,该设备具有噪音低、控制简单等优点。除了以上几种驱动方式,基于静电吸附制动器的力反馈穿戴装置被研发出来,利用静电吸附制动器限制每个手指的运动从而产生力反馈的效果,具有质量轻、成本低、贴附性好等优点。
5.现有的触觉力反馈手部可穿戴设备的驱动方式有很多,如上面提到的气压驱动、液压驱动、电机驱动、磁流变液驱动等等,这些驱动方式均可以实现力反馈功能。气压驱动与液压驱动力反馈设备的驱动系统需要泵等提供动力,导致驱动系统体积庞大、质量重,不易搬运、携带;磁流变液驱动力反馈设备的驱动系统需要控制磁场变化,同样有着驱动系统复杂的问题;而电机驱动力反馈设备往往存在多个传动结构,且力反馈设备刚度较大,尤其是手部触觉力反馈手部可穿戴设备会限制手的正常运动,穿戴装置体自身重量及体积较大,佩戴舒适性较差。综上所述,现有的触觉力反馈设备存在着以下的问题:
6.1、质量重,长时间佩戴导致使用者产生疲惫感;
7.2、刚性大,传动装置均为刚性结构,设备失灵时容易对使用者造成危险;
8.3、噪声大,大多数的电机驱动的力反馈设备在电机运转以及传动时都会产生噪音,影响使用者的体验;
9.4、能量消耗大;
10.5、结构复杂,价格昂贵。
11.因此,亟需提出一种基于超声波空化效应的触觉再现可穿戴装置及其触觉再现模拟方法,以解决上述技术问题。
技术实现要素:
12.本发明所要解决的技术问题:解决现有触觉模拟装置质量重、刚性强、噪声大、结构复杂的问题。
13.为解决上述技术问题,本发明提供以下的技术方案:
14.一种基于超声波空化效应的触觉再现可穿戴装置,包括穿戴装置,所述穿戴装置包括穿戴装置外层、穿戴装置内层和填充液层,所述填充液层设于穿戴装置外层和穿戴装置内层之间,所述穿戴装置外层上设有若干pcb基板,所述pcb基板上设有若干超声波发生组件,所述超声波发生组件与控制器电性连接。
15.优选地,所述超声波发生组件包括线圈、金属震动片、压电陶瓷片和频率驱动器,所述金属震动片的一侧设置有压电陶瓷片,金属震动片位于线圈内侧,压电陶瓷片与频率驱动器电性连接,若干频率驱动器与控制器电性连接。
16.优选地,所述金属震动片的另一侧设置在pcb基板上。
17.优选地,所述穿戴装置为手套,超声波发生组件的数量为四十组,四组超声波发生组件分别设置在穿戴装置大拇指的第一、第二关节的正反面,二十四组超声波发生组件分别设置在穿戴装置其他四根手指的第一关节、第二关节、第三关节的正反面,十二组超声波发生组件分别设置在穿戴装置手掌的正反面。
18.优选地,所述穿戴装置外层、穿戴装置内层选用厚度为0.03mm的天然乳胶材料。
19.一种基于超声波空化效应的触觉再现模拟方法,采用上述基于超声波空化效应的触觉再现可穿戴装置,包括以下步骤:
20.步骤一:触觉再现装置处于待机状态,等待控制装置发送控制信息;
21.步骤二:控制装置发送虚拟物体表面的质感与纹理信息,控制器接受该信息;
22.步骤三:控制器解析质感与纹理信息,得出各个超声波发生组件所需的超声波强度;
23.步骤四:控制器将超声波强度信息发送到超声波发生组件;
24.步骤五:超声波发生组件的频率驱动器改变对应位置金属震动片产生的超声波频率、方向,从而产生目标超声波强度;
25.步骤六:填充液层内的液体超声波发生组件的金属震动片的超声波频率影响,产生不同的纹理变化;
26.步骤七:外界感官通过穿戴装置内层接触超声波产生的冲击波,实现目标模拟触觉。
27.优选地,控制装置为采用微电脑控制的发生器控制箱,用于超声波发生组件的功率控制。
28.优选地,所述步骤六中,金属震动片产生超声波,根据超声波的振幅,填充液层内靠近穿戴装置外层的液体形成设定密度的气泡,气泡生长增大;所述步骤七中,气泡爆破,使穿戴装置内层接收到爆破形成的冲击波。
29.本发明获得的有益效果:
30.1.本装置结构巧妙、设计轻便,减轻使用者在长时间佩戴过程中产生疲惫感;
31.2.本装置便于与外界感官(手)贴合,柔软且具有弹性,在接收气泡产生的压力和温度时可快速反应,进行触感模拟,在提升使用者的用户体验的基础上,保证其安全;
32.3.本装置无需电机等驱动装置控制,在减小能量消耗的同时,减小噪音,节能环保。
附图说明
33.图1是超声波发生组件的结构示意图;
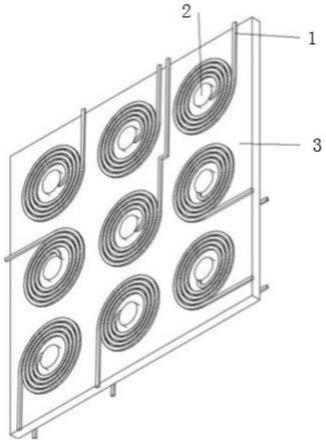
34.图2是超声波发生组件的布置图;
35.图3是穿戴装置的结构示意图;
36.图4是空化泡形成周期示意图;
37.图5是气泡变化示意图;
38.图6是不同频率声波流速度与功率密度的变化曲线;
39.图7是工作流程图;
40.图8是超声波空化效应产生的爆裂气泡示意图;
41.图中1-线圈,2-金属震动片,3-pcb基板,4-压电陶瓷片,5-穿戴装置,51-穿戴装置外层,52-穿戴装置内层,53-填充液层。
具体实施方式
42.为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图中示出的具体实施例来描述本发明。但是应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
43.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
44.实施例1:结合图1-8说明本实施方式,本实施方式的一种基于超声波空化效应的触觉再现可穿戴装置,包括超声波发生组件和控制器,如cn114217647a-超声波换能器的控制方法、装置和超声波装置中所述,超声波发生组件通常包括线圈1、金属震动片2、压电陶瓷片4和频率驱动器,所述金属震动片2的一侧设置有压电陶瓷片4,金属震动片2位于线圈1内侧,压电陶瓷片4与频率驱动器电性连接,频率驱动器与控制器电性连接,还包括pcb基板3,若干超声波发生组件通过所述金属震动片2的另一侧设置在pcb基板3上,线圈1通过pcb基板3固定,若干频率驱动器均与控制器连接,压电陶瓷片4为直径12mm的圆形片,相邻所述
压电陶瓷片4的间距离为1mm,还包括穿戴装置5,穿戴装置5包括穿戴装置外层51、穿戴装置内层52和填充液层53,所述穿戴装置外层51、穿戴装置内层52之间设置有填充液层53,所述超声波发生组件通过pcb基板3设置在穿戴装置外层51上,穿戴装置内层52与皮肤接触;存在于填充液层53的液体中的微气核空化泡在声波的作用下振动,当声压达到一定值时发生的生长和崩溃的动力学过程,超声波作用于液体时可产生大量小气泡,一个原因是液体内局部出现拉应力而形成负压,压强的降低使原来溶于液体的气体过饱和,而从液体逸出,成为小气泡,另一原因是强大的拉应力把液体“撕开”成一空洞,称为空化;液体中的微小气泡核在超声波作用下产生振动,当声压达到一定值时,气泡将迅速膨胀,然后突然闭合,在气泡闭合时产生冲击波;超声波能量足够高时,就会产生“超声波空化”现象,存在于液体中的微小气泡(空化核)在超声场的作用下振动、生长并不断聚集声场能量,当能量达到某个阈值时,空化气泡急剧崩溃闭合的过程,现象气泡的寿命约0.1μs,它在急剧崩溃时可释放出巨大的能量,并产生速度约为110m/s、有强大冲击力的微射流,使碰撞密度高达1.5kg/cm2,现象气泡在急剧崩溃的瞬间产生局部高温高压(5000k,1800atm),冷却速度可达10的9次方k/s;超声波频率越低,在液体中产生空化越容易,也就是说要引起空化,频率愈高,所需要的声强愈大,例如:要在水中产生空化,超声波频率在400khz时,所需要的功率要比在10khz时大10倍,即空化是随着频率的升高而降低,一般采用的频率范围20~40khz。
45.实施例2:结合图1-8说明本实施方式,本实施方式的一种基于超声波空化效应的触觉再现可穿戴装置,包括超声波发生组件和控制器,超声波发生组件通常包括线圈1、金属震动片2、压电陶瓷片4和频率驱动器,所述金属震动片2的一侧设置有压电陶瓷片4,金属震动片2位于线圈1内侧,压电陶瓷片4与频率驱动器电性连接,频率驱动器与控制器电性连接,还包括pcb基板3,若干超声波发生组件通过所述金属震动片2的另一侧设置在pcb基板3上,线圈1通过pcb基板3固定,若干频率驱动器均与控制器连接,压电陶瓷片4为直径12mm的圆形片,相邻所述压电陶瓷片4的间距离为1mm,还包括穿戴装置5,穿戴装置5包括穿戴装置外层51、穿戴装置内层52和填充液层53,所述穿戴装置外层51、穿戴装置内层52之间设置有填充液层53,穿戴装置5为手套,所述超声波发生组件通过pcb基板3设置在穿戴装置外层51上,穿戴装置内层52与皮肤接触,超声波发生组件的数量为四十组,四组超声波发生组件分别设置在穿戴装置5大拇指的第一、第二关节的正反面,二十四组超声波发生组件分别设置在穿戴装置5其他四根手指的第一关节、第二关节、第三关节的正反面,十二组超声波发生组件分别设置在穿戴装置5手掌的正反面,从而实现全方位多级的触觉模拟,穿戴装置外层51、穿戴装置内层52选用厚度为0.03mm的天然乳胶材料,手指与穿戴装置内层52接触表面采用非常薄,且柔软性很高的薄膜材料,通过超声波发生组件产生的不同频率的超声波,使液体发生形变,产生不同的纹理,根据日常经验可知,当手指与在不同纹理上接触并在其表面移动时,将对手指产生很大的摩擦力,这种现象的产生源于指尖组织的多层复合材料特性,通过超声波发生组件的控制,填充液层53内液体产生不同的纹理及流动效果,进而可产生多种数值的摩擦力,最终实现对物体质感和纹理信息的再现;通过在穿戴装置5上的超声波发生组件和填充液层53内的液体,当装置模拟触觉时,频率驱动器控制金属震动片2产生频率变化的超声波,填充液层53内的液体在超声波的变化频率下,因为气泡爆裂产生的冲击波撞击薄膜表面后,在穿戴装置5表面形成不同变化的形状,通过这些变化的形状,使穿戴装置内层52与人手直接接触的薄膜接收到不同大小,方向的力,然后再作用于人手皮肤
上,从而得到触觉再现,使用户的体验感更加真实,即利用超声波发生组件产生的超声波频率的变化来精确地控制液体在手上的力度,可对触觉再现的精细模拟,包括人的抚摸,握手,按压等动作,或者是一些流体在手上的触觉模拟。
46.实施例3:结合图1-8说明本实施方式,本实施方式的一种基于超声波空化效应的触觉再现模拟方法,包括超声波发生组件和控制器,超声波发生组件包括线圈1、金属震动片2、压电陶瓷片4和频率驱动器,所述金属震动片2的一侧设置有压电陶瓷片4,金属震动片2位于线圈1内侧,压电陶瓷片4与频率驱动器电性连接,频率驱动器与控制器电性连接,还包括pcb基板3,若干超声波发生组件通过所述金属震动片2的另一侧设置在pcb基板3上,线圈1通过pcb基板3固定,若干频率驱动器均与控制器连接,压电陶瓷片4为直径12mm的圆形片,相邻所述压电陶瓷片4的间距离为1mm,还包括穿戴装置5,穿戴装置5包括穿戴装置外层51、穿戴装置内层52和填充液层53,所述穿戴装置外层51、穿戴装置内层52之间设置有填充液层53,所述超声波发生组件通过pcb基板3设置在穿戴装置外层51上,穿戴装置内层52与皮肤接触,超声波发生组件的数量为四十组,四组超声波发生组件分别设置在穿戴装置5大拇指的第一、第二关节的正反面,二十四组超声波发生组件分别设置在穿戴装置5其他四根手指的第一关节、第二关节、第三关节的正反面,十二组超声波发生组件分别设置在穿戴装置5手掌的正反面,穿戴装置外层51、穿戴装置内层52选用厚度为0.03mm的天然乳胶材料,本装置结构巧妙、设计轻便,减轻使用者在长时间佩戴过程中产生疲惫感,本装置便于与外界感官(手)贴合,柔软且弹性好,在接收气泡产生的压力和温度时可快速反应,进行触感模拟,在提升使用者的用户体验的基础上,保证其安全,本装置无需电机等驱动装置控制,在减小能量消耗的同时,减小噪音,节能环保;
47.包括以下步骤:
48.步骤一:将穿戴装置5与外界感官接触,触觉再现装置处于待机状态,等待控制装置发送控制信息;控制装置为采用微电脑控制的发生器控制箱,用于超声波发生组件的功率控制;
49.步骤二:控制装置发送虚拟物体表面的质感与纹理信息,控制器(请提供具体型号)接受该信息;
50.步骤三:控制器解析质感与纹理信息,得出各个超声波发生组件所需的超声波强度;
51.步骤四:控制器将超声波强度信息发送到各个超声波发生组件;
52.步骤五:超声波发生组件的频率驱动器改变对应位置金属震动片产生的超声波频率、方向,从而产生目标超声波强度;
53.步骤六:填充液层53内的液体超声波发生组件的金属震动片2的超声波频率影响,产生不同的纹理变化;
54.步骤七:外界感官通过穿戴装置内层52接触超声波产生的冲击波,实现目标模拟触觉。
55.实施例4:结合图1-8说明本实施方式,本实施方式的一种基于超声波空化效应的触觉再现模拟方法,包括以下步骤:
56.步骤一:将穿戴装置5套在手上,触觉再现装置处于待机状态,等待控制装置发送控制信息;控制装置为采用微电脑控制的发生器控制箱,用于超声波发生组件的功率控制;
57.步骤二:控制装置发送虚拟物体表面的质感与纹理信息,控制器接受该信息;
58.步骤三:控制器解析质感与纹理信息,得出各个超声波发生组件所需的超声波强度;
59.步骤四:控制器将超声波强度信息发送到各个超声波发生组件;
60.步骤五:超声波发生组件的频率驱动器改变对应位置金属震动片产生的超声波频率、方向,从而产生目标超声波强度;
61.步骤六:填充液层53内的液体受超声波发生组件的金属震动片2的超声波频率影响,产生不同的纹理变化;金属震动片2产生超声波,根据超声波的振幅,填充液层53内靠近穿戴装置外层51的液体形成设定密度的气泡,气泡生长增大;
62.步骤七:随后气泡爆破,使穿戴装置内层52接收到爆破形成的冲击波,在穿戴装置内层52表面形成不同变化的形状,通过这些变化的形状,使穿戴装置内层52接收到不同大小、方向的力,然后再作用于人手上,从而得到触觉再现。
63.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
64.除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
65.在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
66.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
67.需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用
的数据在适当情况下可以互换,以便这里描述的本技术的实施方式能够以除了在这里图示或描述的那些以外的顺序实施。
68.需要说明的是,在以上实施例中,只要不矛盾的技术方案都能够进行排列组合,本领域技术人员能够根据排列组合的数学知识穷尽所有可能,因此本发明不再对排列组合后的技术方案进行一一说明,但应该理解为排列组合后的技术方案已经被本发明所公开。
69.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1