基于VR的单轨高架区间疏散救援试验系统的制作方法
基于vr的单轨高架区间疏散救援试验系统
技术领域
1.本发明属于疏散逃生技术领域,具体涉及一种基于vr的单轨高架区间疏散救援试验系统。
背景技术:
2.单轨系统与其他交通方式完全隔离,这种脱离地面交通的形式虽然提高了列车运行的可靠性和安全性,但也带来了许多挑战。近年来,国外发生了多起影响较大的单轨事故,轻则使数百人被困,重则致人伤亡。虽然针对单轨列车在区间遇险停运这一情况,运营及设计单位主要从行车调度、救援设备配置、救援力量调度等方面进行研究,总结出了一套较为成熟的救援疏散方案,但如何评价方案的有效性并对方案进行优化仍是一个问题。在区间或车站实地进行演练成本高、风险不可控,受众狭窄,无法覆盖广大乘客群体。
技术实现要素:
3.为了弥补现有技术的不足,本发明提供一种基于vr的单轨高架区间疏散救援试验系统,基于vr技术提供高安全、低成本、有计划和可重复的实验环境,对单轨救援方案进行评估,为设计和运营单位提供决策依据。
4.为了达到上述目的,本发明所采用的技术方案为:
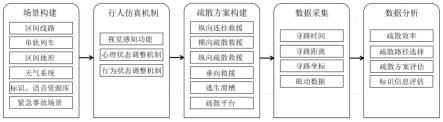
5.一种基于vr的单轨高架区间疏散救援试验系统,包括疏散场景构建模块、单轨救援方式复现模块、行人仿真机制构建模块、疏散数据采集模块及疏散数据分析模块;
6.所述疏散场景构建模块用于构建疏散场景;
7.所述单轨救援方式复现模块用于对单轨列车在区间遇险后各紧急救援方案进行复现;
8.所述行人仿真机制构建模块用于构建疏散人员的智能体模型;
9.所述疏散数据采集模块用于记录用户在疏散过程中的寻路时间和寻路坐标、用户与单轨列车内导向标识之间的眼动交互数据以及人群疏散的总时间;
10.所述疏散数据分析模块根据寻路坐标计算寻路坐标的距离总和,得到寻路距离;同时通过坐标点信息绘制疏散路径线,得到乘客在疏散过程中的路径选择情况;
11.最终通过用户在疏散过程中的寻路时间、寻路距离和人群总疏散时间对不同疏散方案的疏散效率和导向标识生态效度进行评估,通过用户与导向标识之间的眼动交互数据对导向标识的可靠性进行评估;所述导向标识的可靠性表示行人对导向标识的依赖程度,生态效度为导向标识对用户疏散寻路的影响程度。
12.具体地,所述疏散场景包括土建结构、单轨列车、外部环境、视听觉场景及紧急事故场景。
13.具体地,所述疏散人员的智能体模型具有视觉感知功能、心理状态调整功能及状态行为调整功能,智能体个体可通过视觉感知功能感知其所在位置周边的行人密度,并依据感知到的危险调整心理状态,最终基于感知到的行人密度及调整后的心理状态,实现对
状态行为的调整。
14.具体地,智能体个体基于周围行人密度计算当前状态下的期望速度,若当前速度小于期望速度,则进入加速状态,反之则进入减速状态;同时,也可以通过视觉识别前进方向上的障碍物,并根据障碍物位置进行绕避、等待或掉头;
15.智能体个体会感知不同类型的危险并产生恐慌情绪,伴随有慌乱的寻路行为和惊慌的喊叫声;因紧急事件产生的恐慌情绪通过紧急恐慌因子提高其疏散速度,因高差引起的恐慌情绪通过恐高因子降低其疏散速度;
16.智能体个体在每一仿真步的决策开始之前,都会确认目前的疏散状态及自身所处的面域性。智能体个体可实时获取其在仿真环境中的(x,y)坐标,并依据(x,y)坐标判断其是否已经到达疏散目的地;若智能体个体已经处于目的地网格上,则平台将结束此智能体个体相关的进程与属性;若智能体个体仍处于疏散状态下,则将搜寻场景中具备目的地属性的网格面域,并将其作为目标。
17.具体地,包括实验模式和演练模式:
18.所述实验模式下,用户可通过系统初始界面对疏散场景构建参数进行设置,仿真开始后,系统会根据仿真场景设定生成单轨紧急疏散救援场景,通过收集车厢内智能体人群疏散行为数据对疏散方案进行评估;
19.所述演练模式下,用户对仿真参数进行设定后,可通过佩戴vr设备进入仿真场景进行疏散,系统实时收集用户和人群的疏散行为数据以及用户的眼动交互数据,完成对疏散方案的评估;所有人群仿真机制参数通过结合在演练模式下收集的真人疏散行为数据进行标定;后续演练模式下收集的用户疏散行为数据也可用于行人仿真机制参数修正。
20.本发明的有益效果:
21.1)本发明将虚拟现实技术应用于单轨疏散救援,系统具有高沉浸性、高还原性,真实地复现了跨座式单轨在高架区间遇险的紧急情况,使用者可在该虚拟环境中进行逃生并与各类环境因素进行交互,可用于开展不同工况下的救援疏散研究;
22.2)本发明通过建立独特的单轨车厢行人的仿真机制,可探究人群因素对单轨车厢中行人疏散行为的影响,通过演练模式下的真人实验获取真实的行人疏散数据不断对行人仿真机制参数进行修正,使该机制不断趋近于真实场景中人群疏散效果;通过建立标志标识图片库和广播等声音音频库,考虑影响疏散的各种因素,可探究单轨车厢内提示信息以及疏散救援设备对乘客个体主客观层面的影响;实时收集用户的疏散行为数据和眼动交互数据,丰富行为数据的维度和可靠性;
23.3)本发明基于vr技术对单轨救援方案进行评估,为单轨救援应急演练与培训提供高安全、低成本、有计划和可重复的实验环境。
附图说明
24.图1为本发明框架流程图;
25.图2为单轨列车场景图;
26.图3为逃生场景图。
具体实施方式
27.下面结合具体实施方式对本发明进行详细的说明。
28.如图1所示,本发明的疏散救援试验系统包括疏散场景构建模块、单轨救援方式复现模块、行人仿真机制构建模块、疏散数据采集模块及疏散数据分析模块;
29.1)疏散场景构建
30.基于vr构建技术,疏散场景构建模块可完成疏散场景的构建,如图2所示,疏散场景包括土建结构、单轨列车、外部环境、视听觉场景及紧急事故场景;
31.单轨土建结构部分主要构建区间线路,包括轨道梁、墩身及支座等构件,各构件参数基于《gb 50458-2008跨座式单轨交通设计规范》进行参数化建模;单轨列车部分按照实际几何尺寸与构造样式进行高精度和高还原性的建模,同时实现跨座式单轨列车运行过程的精确控制,除控制列车启停外,还可根据仿真进程实现背景音效实时变动、车门开关等交互性功能;
32.外部环境部分主要考虑地物地貌(如山川、建筑、树木等)以及环境天气,环境天气可以在系统中实时动态控制,包括光照条件、雨雪、闪电、雾,以及可见度、降水量、风向风速等条件;为还原跨座式单轨列车在疏散方案中的各类视觉、听觉提示信息,本发明在单轨列车中构建包含各种导向标识和广播等资源库的视听觉场景;
33.标识资源包括各种类型的导向标识,涵盖文字类、箭头类、图画类等标识类型;语音资源库包括列车各救援方式下对乘客的疏散提示语音,同时还原跨座式单轨列车在各类工况下的背景音效,如车辆行驶时的机械声、轮轨摩擦声以及车厢内的嘈杂声,车辆遇险时乘客惊慌的声音,可以营造单轨遇险后车厢内的恐慌氛围、车门开关闭以及搭设救援渡板的声音等,建立身历其境的听觉效果;
34.根据近年来国内外单轨列车事故成因,本系统构建了包括极端天气影响(极端雨、雪天气)、设备故障、火灾(电气设备故障起火、橡胶轮胎燃烧)等所导致的紧急事故场景,能够真实地复现跨座式单轨在高架区间遇险的紧急情况。
35.2)单轨救援方式复现
36.基于vr构建技术,单轨救援方式复现模块可对单轨列车在区间遇险后各紧急救援方案进行复现;紧急救援方案包括单轨纵向连挂救援、横向疏散救援、纵向疏散救援、单轨列车垂向救援、依托逃生滑槽、利用单轨疏散平台等;
37.单轨纵向连挂救援中,系统将自动生成救援列车,救援列车到达后与事故列车进行连挂,将事故车辆牵引至临近车站疏散乘客;
38.横向疏散救援中,系统自动生成救援列车从对向线路运行至与受困列车平齐的位置,系统自动设置横向救援渡板放置在对应的两车客室门之间,乘客可从救援渡板寻路疏散至对向救援列车;
39.纵向疏散救援中,系统自动生成救援列车运行至事故列车(前)后方,在司机室之间自动搭建救援渡板,乘客从救援渡板疏散转移至救援列车;
40.单轨列车垂向救援中,系统自动生成救援车运行至单轨列车下方,乘客疏散至车门位置,通过升降平台被运送到地面进行疏散;
41.采用逃生滑槽,乘客疏散至车门位置,系统车辆自动展开螺旋形通道,乘客可通过滑槽疏散至地面;
42.采用疏散平台,系统在轨道梁一侧自动生成分散或连续的人行道,乘客可寻路至人行道进行疏散;
43.在所有疏散救援方式中,救援列车到达事故现场的时间根据事故列车在区间线路的位置进行计算,疏散过程中系统会针对不同的疏散方式自动提供不同的疏散路径信息。
44.3)行人仿真机制构建
45.基于vr构建技术,行人仿真机制构建模块可构建疏散人员的智能体模型,智能体模型基于中国人体尺寸创建了高精细度的10种男性人物模型和7种女性人物模型,每个智能体模型的不同状态,如静止、交谈、走步及跑步等;
46.所构建的智能体模型具有视觉感知功能、心理状态调整功能及状态行为调整功能,智能体个体可通过视觉感知功能感知其所在位置周边的行人密度,并依据感知到的危险调整心理状态,最终基于感知到的行人密度及调整后的心理状态,实现对状态行为的调整;每个智能体模型都的不同状态,如静止、交谈、走步及跑步等;
47.智能体个体具备一定视野范围,基于周围行人密度计算当前状态下的期望速度,若当前速度小于期望速度,则进入加速状态,反之则进入减速状态;同时,也可以通过视觉识别前进方向上的障碍物,并根据障碍物位置进行绕避、等待或掉头;
48.单轨疏散为高空疏散,疏散人员除受到紧急事件引起的恐慌情绪外,巨大高差也会加剧部分疏散人员的恐慌心理。本系统智能体具备双重心理调整机制;单轨车厢遇险后,智能体会感知不同类型的危险并产生恐慌情绪,伴随有慌乱的寻路行为和惊慌的喊叫声;因紧急事件产生的恐慌情绪通过紧急恐慌因子提高其疏散速度,因高差引起的恐慌情绪通过恐高因子降低其疏散速度;
49.智能体个体在每一仿真步的决策开始之前,都会确认目前的疏散状态及自身所处的面域性。智能体个体可实时获取其在仿真环境中的(x,y)坐标,并依据(x,y)坐标判断其是否已经到达疏散目的地;若智能体个体已经处于目的地网格上,则平台将结束此智能体个体相关的进程与属性;若智能体个体仍处于疏散状态下,则将搜寻场景中具备目的地属性的网格面域,并将其作为目标。
50.4)疏散数据采集
51.系统自动记录乘客在疏散过程中的寻路时间、寻路坐标;在疏散过程中,疏散数据采集模块会自动记录乘客的寻路时间;同时基于单轨车厢建立位置坐标系,每个位置对应一个坐标点,用户和场景中的智能体在寻路过程中,其寻路过程以坐标形式自动储存;在演练模式下,用户通过佩戴嵌入式vr眼动设备自动收集并储存用户与导向标识之间的眼动交互信息,包括注视物体、注视时间、注视频率、注视距离等参数,导向标识设置于单轨列车内。
52.5)疏散数据分析
53.基于收集到的坐标信息,疏散数据分析模块自动计算寻路坐标的距离总和,得到寻路距离参数;同时通过坐标点信息绘制疏散路径线,得到乘客在疏散过程中的路径选择情况;最终通过用户在疏散过程中的寻路时间、寻路距离和人群总疏散时间对不同疏散方案的疏散效率和导向标识生态效度进行评估,通过用户与导向标识之间的眼动交互数据对导向标识的可靠性进行评估;导向标识的可靠性表示行人对导向标识的依赖程度,生态效度为导向标识对用户疏散寻路的影响程度,与疏散效率相关。
54.对于用户来说,疏散效率的评价指标主要是用户寻路时间和寻路距离,通过比较用户在不同疏散方式下的寻路时间和寻路距离对疏散方案进行评估,寻路时间越少、寻路距离越短则在该疏散方式下的疏散效果越好;对于车厢内的人群来说,疏散效率的评价指标为人群从疏散开始到疏散结束所花费的总时间,人群完成疏散所花费的疏散总时间越少,则该疏散方式下的疏散效果越好。
55.系统收集的眼动交互数据用于探究乘客与疏散设施之间的交互情况,可对不同疏散方式下单轨车厢内标识信息的可靠性及生态效度进行评估;车厢内标识信息的可靠性评价指标主要基于乘客在疏散过程中车厢内导向标识的注视时间和注释频率等参数,通过比较用户在不同疏散方式下对不同类型导向标识的注释参数对车厢内的导向标识的可靠性进行评估,对导向标识的注视时间越长、注视频率越高,则该种类型导向标识的可靠性越高;对导向标识生态效度的评价指标也是基于用户的寻路时间和寻路距离,用户在该类型导向标识下的寻路时间越少、寻路距离越短,则该类型导向标识的生态效度越好。
56.6)工作模式
57.实验模式下,用户可通过系统初始界面对仿真人数、单轨事故场景、事故发生的位置和时间以及单轨疏散救援方式等参数进行设置,仿真开始后,系统会根据仿真场景设定生成单轨紧急疏散救援场景,场景中的智能体乘客依照行人仿真机制进行疏散,通过收集人群疏散行为数据对疏散方案进行评估;
58.演练模式下,用户对仿真参数进行设定后,可通过佩戴vr设备进入仿真场景进行疏散,系统会实时收集用户和人群的疏散行为数据以及用户的眼动交互数据,完成对疏散方案的评估;在演练模式下收集的用户数据也可用于行人仿真机制参数修正。
59.具体实施例如下:
60.演练模式下,以单轨横向疏散救援为例,紧急事故场景为设备故障导致单轨列车在高架区间停运、导向标识形式为文字类型;
61.在仿真开始前,用户通过仿真参数设定界面对车厢内乘客人数、紧急事故场景、事故发生时间、导向标识形式等参数进行设定,随后用户佩戴vr设备进入仿真场景进行疏散;
62.仿真开始,用户位于正常行驶的单轨列车上,基于系统语音资源库,用户可以清晰的听到车辆行驶时的机械声、轮轨摩擦声以及车厢内人群的嘈杂声;事故发生后,系统会提示单轨列车发生设备故障,列车会自动减速直至停运在高架区间;车辆遇险后伴随有乘客惊慌的声音;
63.列车发出求救信息后,系统自动生成救援列车,从对向线路运行至与受困列车平齐的位置,对向列车到达后自动设置横向救援渡板放置在对应的两车客室门之间,救援列车到达事故现场的时间与设定的事故发生时间有关,系统会根据事故列车在区间线路的位置进行计算;
64.救援列车到达事故现场并放置横向救援渡板后,系统提示乘客通过横向救援渡板疏散至对向列车,车厢内的智能体模型依据行人仿真机制进行疏散,每个车门作为智能体寻路的一个寻路终点;如图3所示,用户可根据系统语音提示和车厢内导向标识进行寻路疏散;智能体和用户通过横向渡板疏散至对向列车后疏散完成,仿真结束;
65.在疏散过程中,系统会自动记录用户和车厢中人群的的寻路时间和寻路坐标;用户佩戴嵌入式vr眼动设备自动收集用户与导向标识之间的眼动交互信息,包括注视物体、
注视时间、注视频率、注视距离等参数;仿真结束后用户可通过系统界面输出本次疏散的寻路数据和眼动交互数据;
66.基于坐标信息,用户通过疏散数据分析模块自动计算寻路坐标的距离总和,得到寻路距离参数,基于寻路坐标绘制轨迹可以得到用户在寻路过程中的路径选项情况,基于寻路距离和寻路时间可以得到用户在疏散过程中的疏散速度。
67.随后本次仿真用户的寻路时间和寻路距离、人群疏散的总时间、用户与导向标识间的注视时间、注视频率等参数会被单独保存;用户在不同疏散方式、不同导向标识类型下进行疏散得到的相应的仿真参数会以相应的形式被保存,用户可通过疏散数据分析功能,对比分析不同疏散方案的疏散效率以及导向标识的可靠性和生态效度;系统将相应的仿真参数通过最大最小化归一化方法将标准化后的数值处于[0,1]之间,用户的寻路时间、寻路距离和人群的疏散总时间等参数数值越接近于0,则该疏散方案的疏散效果、该类型导向标识的生态效度越好;用户的注释时间和注视频率等参数数值越接近于1,则该类型的可靠性越高。
[0068]
本发明的内容不限于实施例所列举,本领域普通技术人员通过阅读本发明说明书而对本发明技术方案采取的任何等效的变换,均为本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1