应用于矩形曲线顶管底幕法施工对既有物体影响的分析预测方法
1.本发明涉及矩形曲线顶管底幕法施工对既有物体变形控制的研究领域。
背景技术:
2.矩形曲线顶管底幕法施工作为发展时间较短的一种工程技术,其在隧道工程中的应用还比较少,特别是小曲率半径矩形曲线顶管,尚处于研究探索阶段。采用矩形曲线顶管形成底幕对其包围范围内的物体形成保护作用或对包围范围外的地层在内部作业时起到隔离作用(见图3场景示意图),在地下工程拓建、地铁地下车站改造和水下打捞等领域具有良好的拓展应用前景。然而,目前尚未有曲线顶管底幕法的实施案例。矩形曲线顶管尺寸小、推进较快、地下环境复杂,加之一些邻近物体结构(如既有地铁线路、管线、古沉船等)往往因安全级别高极为敏感,因特殊价值极为宝贵且非常脆弱,在推进过程中可能因受力变形和/或因发生较大的位移而失效破坏,从而造成严重的后果。为指导工程施工、最大限度地保证邻近物体的原生性、安全性和稳定性,需要提出一种能够对矩形曲线顶管底幕法顶进过程中引起物体受力和变形动态演化的预测方法,确定出最不利的施工节点并指导和制定出相应保护措施。对于此类问题,业内传统做法是建立地层和目标保护物体两者的有限单元模型,对矩形曲线顶管底幕施工过程进行数值仿真。该方法的精确性受制于本构模型的确定、输入参数的准确性等诸多不确定因素的影响,整个动态掘进模拟困难且计算耗时长。此外,针对工程中不同类型的问题都需要重新独立建模,缺乏可重复性。
技术实现要素:
3.本发明由矩形曲线顶管顶进过程中的顶推力数据,计算得到面板阻力数据,并通过建立相对坐标系,利用据弹性力学中半无限空间体mindlin解的计算原理,通过简化矩形曲线顶管弧形梁的几何模型,计算迎面阻力引起物体中各位置的附加应力,基于winkler地基模型,根据地基模型、变形协调条件、平衡方程等计算物体各点的竖向沉降情况,并通过物体几何模型的离散化,计算物体各点所受外力,得到物体合力状态,计算顶管顶进过程中物体的平动位移和纯转动等位移情况,预测矩形曲线顶管顶进过程中物体位置的动态变位情况。
4.技术方案为:
5.一种应用于矩形曲线顶管底幕法施工对既有物体影响的分析预测方法,应用于顶管机施工作业,其特征在于,包括:
6.第一部分:每根矩形曲线顶管弧形梁在顶进施工过程中掘进系统通过传感系统,根据顶管机千斤顶液压油缸压力计算相应的顶推力数据;作为输入进入第二部分;
7.第二部分:举例而非限定,可以由顶管机的控制系统(或者后台计算系统,简称为“分析预测系统”)计算输出预测物体位移和变形数据;
8.第三部分:分析预测系统根据第二部分预测结果,实时显示物体位移和变形数据,
对现场掘进速度、刀盘转速、泥水舱压力施工参数进行调整控制,对于对位移、变形敏感的目标保护物体,当必要时如果其位移、变形超出安全阈值指标,则进行人工干预或者调整掘进系统作业。
9.其中,第二部:
10.分析预测系统将连续的顶进过程离散化为数个顶进角度工况的叠加,以物体前一顶进角度位移发生后的新位置作为后一顶进角度计算的起始位置;对于多根弧形梁(n根)组成底幕的情况,在第k根弧形梁计算完毕后,将其视为合外力平衡的状态,从平衡态出发计算第k+1根弧形梁的受力状态;以第k根弧形梁顶进完毕状态下的位移状态作为初始条件进入第k+1根弧形梁的计算,采用叠加原理分析预测系统预测输出矩形曲线顶管底幕法施工中目标保护物体的位移、变形状态,为整个施工过程的安全提供保障。
11.本发明提出一套能够对矩形曲线顶管底幕法施工对既有物体影响进行预测的方法,对既有物体模型的简化可以适用于任何能够通过多平面近似等方式简化为等截面拉伸体(如圆柱、棱柱等)的物体模型。因此,本发明中各部分充分模块化,且并不依赖于物体的形状,可以在稍作改动的情况下应用于临近小曲率半径曲线顶管顶进施工穿越或包围多种不同形状的物体或地下管线的情形,具有良好的可拓展性和迁移性。
附图说明
12.图1本发明方法过程流程图
13.图2计算示意图(正视图)
14.图3计算截面俯视示意图
15.图4矩形曲线顶管底幕法施工场景示意及其本发明模型三维示意图
16.图5应用例中假想物体全尺寸模型首根弧形梁竖向位移数据
17.图6应用例中假想物体全尺寸模型全部顶进完成后的竖向变形量
具体实施方式
18.本发明方法包括三部分
19.第一部分:每根矩形曲线顶管弧形梁在顶进施工过程中掘进系统通过传感系统,根据顶管机千斤顶液压油缸压力计算相应的顶推力数据;作为输入进入第二部分;
20.第二部分:计算输出预测物体位移和变形数据;
21.第三部分:系统根据第二部分预测结果,实时显示物体位移和变形数据,对现场掘进速度、刀盘转速、泥水舱压力等施工参数进行调整控制,对于对位移、变形敏感的目标保护物体,当必要时如果其位移、变形超出安全阈值指标,则进行人工干预或者调整掘进系统作业。
22.其中,第二部方案思路概括为,
23.系统将连续的顶进过程离散化为数个顶进角度工况的叠加,以物体前一顶进角度位移发生后的新位置作为后一顶进角度计算的起始位置。对于多根弧形梁(n根)组成底幕的情况,在第k根弧形梁计算完毕后,将其视为合外力平衡的状态,从平衡态出发计算第k+1根弧形梁的受力状态;以第k根弧形梁顶进完毕状态下的位移状态作为初始条件进入第k+1根弧形梁的计算,采用叠加原理系统预测输出矩形曲线顶管底幕法施工中目标保护物体的
位移、变形状态,为整个施工过程的安全提供保障。
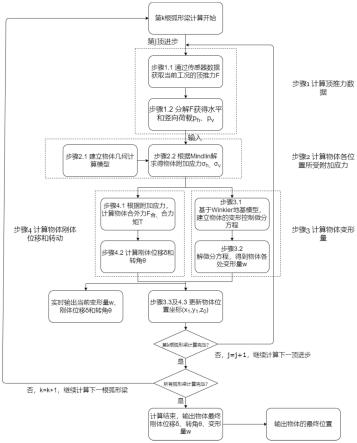
24.第二部分的预测全过程,算法流程如图1所示。
25.步骤1:由矩形曲线顶管弧形梁顶进过程中传感系统提供的顶推力数据,计算得到第k根弧形梁的竖向、水平推力。
26.具体包括:
27.步骤1.1:获取第k根弧形梁第j个顶进步的顶推力数据fj。
28.步骤1.2:将顶推力fj分解为水平和竖直分量,通过式(1)获得第j个顶进步顶推力水平和竖向分量p
h,j
、p
v,j
;
29.p
v,j
=f
j sinθj30.p
h,j
=f
j cosθjꢀꢀꢀꢀ
(1)
31.式中fj为测得的总顶推力,θj为顶管当前顶进角度。
32.步骤2:根据弹性力学中半无限空间体mindlin解的计算原理,通过简化曲线顶管弧形梁的几何模型,在几何模型闭合连续、均质、小变形等合理假设的基础上,计算迎面阻力引起物体中各位置附加应力。
33.具体包括:
34.步骤2.1:如图2、图3所示,将目标保护物体简化为等长、等体积的圆柱体几何模型,其面域为г;对于其他模型,可按其几何形状的不同,对其截面采取多截面近似的方法,化为其他等截面拉伸体,计算方法不变(在后续工况中使用同一个几何模型,但位置发生变化),顶推力视作全部按均布荷载以迎面阻力的形式施加于弧形梁端面上。所述迎面阻力近似等于顶推力大小,按均布荷载施加在端面上。
35.步骤2.2基于mindlin解,以曲线顶管圆心为坐标原点、物体长、短轴、竖直方向分别为x、y、z轴正方向建立空间坐标系,计算迎面阻力引起物体表面任意位置点q(xq,yq,zq)∈г的附加应力。按式(2)和(3)分别求得在第j个顶进步中竖向、水平荷载pvdξdη和phdξdη引起物体上任一点q(xq,yq,zq)∈г处的附加应力σ
zv
、σ
zh
:
[0036][0037][0038]
其中,σz=σ
zv
+σ
zh
。
[0039]
式中,dξdη为弧形梁顶进面ω上的微元(下同),ξ和η为顶进面上相互垂直的局部坐标,ν为泊松比,为第j顶进步顶管端面埋深,r
梁
为弧形梁半径。所述弧形梁顶进面,即迎面。其中,
[0040][0041]
步骤3:基于winkler地基模型,图4中以弧形梁k的圆心为坐标原点o,分别以目标保护物体的圆柱体轴、弧形梁k所在截面的水平和竖直方向确定空间坐标系的x、y、z轴,在该空间坐标系下,根据地基模型、变形协调条件、平衡方程等计算物体各点的竖向变形量w。
[0042]
具体包括:
[0043]
步骤3.1基于winkler地基模型,建立物体和地基的变形协调条件、平衡方程,确定物体的变形控制微分方程;
[0044]
分析顶管顶进引起垂直于圆柱体的附加应力时,可以将圆柱体看作是分布荷载作用下的winkler弹性地基无限长梁。于是,得到附加应力对物体影响的控制方程:
[0045][0046]
ei为物体抗弯刚度,pz(x)=σzd为物体上的附加荷载,
[0047]
d为物体直径(按相同面积的圆等效,下同)。
[0048]
k为地基基床系数,按vesic提出的公式,
[0049][0050]
步骤3.2求解变形控制微分方程,获得物体各点的竖向变形量数据w。
[0051]
物体受集中力p0作用下的解为:
[0052][0053]
其中,
[0054]
将均布荷载视作集中荷载p(ξ)dξ的积分形式,按式(12)计算并在均布荷载范围内积分,得到物体竖向变形量的解析公式(ξ为积分变量):
[0055][0056]
获得的竖向变形量w可以实时输出,用于掘进过程中对被保护物体变形的动态监测,并在超出阈值范围时系统及时调整作业参数和作业方式等。
[0057]
步骤3.3对于同一根弧形梁计算中的每个工况,基于上一工况,确定物体变形计算的初始位置,即根据上一阶段的计算结果,将各点当前竖向坐标数值按照竖向变形量进行更新。
[0058][0059]
其中,k为当前弧形梁推进顺序编号,j为顶进步编号。
[0060]
步骤4:根据步骤2中得到的迎面阻力引起物体中各位置附加应力,确定物体在顶进过程中的合外力状态和位移,并更新物体位置;
[0061]
步骤4.1求第k根管节第j顶进步物体合外力:每个计算区域内外力按式p
k,j
=σ
zk,j
a计算,其中a为区域面积。
[0062]
作用在物体重心上的合外力f
合k,j
=∑
γ
p
k,j
,γ为物体总计算区域。
[0063]
作用在物体上的合力矩t
k,j
=∑
γ
p
k,j
·
l,l为各计算区域重心到物体重心的距离。
[0064]
步骤4.2根据外力状态(合力和合力矩),根据牛顿第二定律f=ma和运动学公式,按式(9)得到物体在第k根管节第j顶进步中的位移δ
k,j
和转角θ
k,j
;
[0065][0066][0067]
其中a
k,j
为加速度,ω
k,j
为角加速度,j为转动惯量,m为质量,t为每顶进步的顶进时长。
[0068]
本步骤中获得的刚体位移和转角数据δ
k,j
和θ
k,j
可实时输出,用于掘进过程对被保护对象的实时监测,并在超出容许范围时及时调整作业参数和作业方式等。
[0069]
步骤4.3根据步骤4.2得到的位移,更新物体各计算点的位置坐标,若此时非最后一个工况,则继续计算下一工况(回到步骤1),直至所有弧形梁均推进完毕。
[0070]
实施例
[0071]
本发明技术方案具体应用时,将算法嵌入曲线顶管掘进系统。
[0072]
使用本发明预测方法,拟应用于某打捞工程,其中:该矩形曲线顶管底幕法施工全过程共15根弧形梁,拟打捞物体埋深取2.5m,总长38.6m,直径d=2.7m;弧形梁半径r
梁
=8.5m,密度ρ取0.6
×
103kg/m3,抗弯刚度ei=2.6
×
10
10n·
m2;土的泊松比ν取0.4,弹性模量es=19.5mpa。
[0073]
模型示意图如图4所示,运用本发明预测方法得到首根弧形梁顶进后的竖向位移以及15根弧形梁整体顶进完成后的竖向变形量结果分别如图5、图6所示:
[0074]
从图5中可知在单根弧形梁顶进时,目标打捞物体的整体位移从初始位置逐渐增大,在顶进完成时达到最大值25mm左右,在顶进角度90
°‑
150
°
之间时,变形增长速率最快。因此在顶进过程中后期需要密切关注拟目标打捞物体位移量的变化,若超出容许值则需要调整掘进作业方式或进行人工干预。
[0075]
从图6中可知在15根弧形梁整体顶进完成后,物体的竖向变形量整体上呈现一个双峰“m”形,且呈现较高的对称性,最大变形发生在左、右长度约1/4处,约为2mm。在掘进过程中需要重点关注变形量较大处,其变形容易超出容许范围。若发生变形量过大超出阈值等情况,则需要人工干预或调整作业方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1