利用聚类算法的大视场望远镜高轨目标快速检测方法与流程
1.本发明属于太空态势感知领域,具体为一种利用聚类算法的大视场望远镜高轨目标快速检测方法。
背景技术:
2.随着人类利用太空的能力不断提高,空间航天器数目迅猛增加。以地球同步轨道为代表的高轨空间正变得越发拥挤。一旦发生碰撞,即使是轻微剐蹭,也会导致卫星载荷失效或整星报废,碰撞产生的残骸还可能引发二次碰撞。为了保证我方高价值卫星目标免于被撞击,需要监控空间目标的运行状态,实现太空态势感知,从而为可能要到来的撞击提供及时预警,避免灾难的发生。
3.由于高轨目标通常距离地面达到了几万公里的量级,地基雷达通常难以实现有效探测,即使是先进雷达能够探测到,也会因为高昂的运行费用而无法长年累月的完成空间目标的持续监测。因此采用地基大视场望远镜进行空间高轨目标监视是业界的常用方法。地基大视场望远镜的视场宽度通常达到2度以上,拍摄的图像分辨率能达到4k或6k水平。采用2-5秒曝光时间即可有效捕捉到高轨卫星目标。
4.大视场望远镜拍到的高轨卫星图像包含成千上万个光斑(即光源),其中包含若干(如几个或几十个)高轨卫星目标。在没有先验信息的情况下,如何从拍摄结果中检测出高轨卫星目标是值得研究的问题。
技术实现要素:
5.为解决目前对高轨目标进行态势感知和监控所存在的问题,本发明利用地基大视场望远镜监视高轨人造天体目标,并提出一种利用聚类算法的大视场望远镜高轨目标快速检测方法,能够从观测图像序列中自动检测人造天体目标,从而能为太空目标定轨和碰撞预警提供技术支撑。
6.考虑到单帧图像中目标光斑与自然天体光斑十分相似,本发明采用先关联后检测(track-before-detect)的算法思想,能够从连续拍摄的多帧图像序列中快速检测到卫星目标。与已有的检测方法不同,该方法充分考虑了高轨目标在地基大视场望远镜中的移动特征,将聚类算法引入到目标检测过程中,不仅极大的提高了检测速度,还提升了目标检测稳定性。
7.本发明的技术方案为:
8.一种利用聚类算法的大视场望远镜高轨目标快速检测方法,包括以下步骤:
9.步骤1:获取大视场望远镜对待检测高轨目标所在空域的连续n帧观测图像,并进行测光处理,分别确定每帧图像中光源在各自图像坐标系中的位置;
10.步骤2:对连续n帧观测图像组成的图像序列进行配准对齐;
11.步骤3:确定候选目标集:
12.步骤3.1:将配准对齐后的n帧观测图像中的光源在第1帧图像坐标系下的坐标组
合成矩阵m;矩阵m规模为m*2,m代表n帧图像中的光源总数,2代表两列,分别是x和y坐标;
13.步骤3.2:设置聚类方法中的关键参数,并利用聚类方法对矩阵m中的元素进行聚类;所述关键参数为聚类样本的距离半径r
cluster
以及聚类的最小样本数量n
min
;
14.步骤3.3:经过步骤3.2聚类后,聚类成功的光源是要被滤除的光源,聚类不成功的光源组成卫星候选目标集;
15.步骤4:利用聚类算法在候选目标集中检测卫星目标:
16.步骤4.1:利用聚类方法对卫星候选目标集中光源点进行聚类,设置r
cluster
=2*v*t~8*v*t,n
min
=3;
17.步骤4.2:通过步骤4.1聚类得到若干聚类簇,每个簇点数不小于3;对于每个簇,采用直线检测方法得到其中的满足直线特征的点迹,即为检测到的卫星目标。
18.进一步的,步骤2中采用以下步骤对图像序列进行配准对齐:
19.步骤2.1:对于第i帧观测图像与第i+1帧观测图像,分别获取其中各自最亮的前n个光源点在各自图像坐标系中的坐标,形成坐标集a和b;
20.步骤2.2:分别计算坐标集a中每个点到坐标集b中所有点的距离;对于坐标集a中某一点,得到其与坐标集b中所有点的距离的最小值,以及最小值对应的坐标集b中的点,进而由坐标集a中所有点各自对应的最小距离组成最小距离集合,并得到每个最小距离对应的点对;
21.步骤2.3:统计最小距离集合中的众数,得到众数对应的若干最小距离,进而得到所述众数对应的若干最小距离所对应的若干点对,这些点对就是第i帧观测图像与第i+1帧观测图像中相匹配的特征点对;
22.步骤2.4:利用特征点对获取x方向和y方向的坐标差值,即为第i帧观测图像与第i+1帧观测图像的位移量;
23.步骤2.5:利用相邻帧观测图像之间的位移量叠加,得到图像序列中其余观测图像与第1帧观测图像的位移量,进而实现将图像序列中其余观测图像与第1帧观测图像配准对齐。
24.进一步的,步骤3中采用基于密度特征的聚类方法dbscan进行聚类。
25.进一步的,所述聚类样本的距离半径r
cluster
大于恒星对齐后的位置偏差,且小于卫星目标跨相邻帧移动的像素数。
26.进一步的,所述聚类样本的距离半径r
cluster
=3;聚类的最小样本数量n
min
=2。
27.进一步的,步骤3中,在进行聚类前,对矩阵m增加边界约束条件,只有处于n帧观测图像配准对齐后重叠区域内的光源才进行聚类,忽略在重叠区域外的光源。
28.进一步的,步骤4中,对于若干聚类簇,采用并行计算方式进行直线检测。
29.进一步的,步骤4中,当聚类簇中的点数小于设定阈值时,采用遍历法确定直线点迹,否则采用hough变换法确定直线点迹。
30.所述遍历法确定直线点迹过程为:聚类簇中各点均来自于当前图像序列中的n帧图像;每次从聚类簇中选择属于不同帧的至少3个点,组成一个点迹,结合点迹中各点坐标、时刻,按时间顺序计算速度,如果点迹中各点速度矢量差异小于设定门限,则认为该点迹符合高轨卫星目标检测要求并记录输出。
31.所述hough变换法确定直线点迹过程为:对聚类簇中的点集依次进行xy与tx或xy
与ty两层hough变换直线检测,这里的t、x、y分别代表时间轴、x轴和y轴;输出满足直线特征的点迹。
32.有益效果
33.本发明沿用了先关联后检测(track-before-detect)的算法思想,能够从连续拍摄的多帧图像序列中快速检测到卫星目标。与已有的检测方法不同,该方法充分考虑了高轨目标在地基大视场望远镜中的移动特征,将聚类算法引入到目标检测过程中,不仅极大的提高了检测速度,还提升了目标检测稳定性。
34.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
35.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
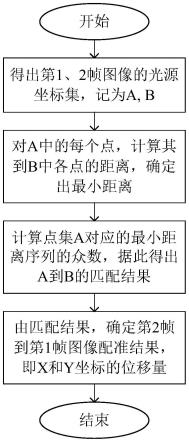
36.图1:图像序列配准方法;
37.图2:图像配准过程中的位移示意图;
38.图3:目标直线分布情况示意图;
39.图4:光源检测和图像配准后的来自5帧图像的光源点;
40.图5:光源检测和图像配准后的来自5帧图像的光源点(局部);
41.图6:聚类滤除恒星后的候选目标集;
42.图7:聚类滤除恒星后的候选目标集(局部);
43.图8:对候选目标集的聚类结果;
44.图9:对各个簇进行xy直线检测后的结果;
45.图10:对各个簇进行tx直线检测后的结果。
具体实施方式
46.下面详细描述本发明的实施例,所述实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
47.本实施例服务于太空态势感知,利用地基大视场望远镜监视高轨人造天体目标,将聚类算法引入高轨卫星目标检测流程中,能够从观测图像序列中自动检测人造天体目标,极大提高了目标检测效率。
48.本实施例中,按照先关联后检测的思想,对某个图像序列(地基大视场望远镜5帧连续拍摄的照片)进行测光处理,分别确定每帧图像中光源位置(即光源在图像中的坐标,以图像左上角为原点)。然后,经过图像序列的配准对齐、滤除恒星、卫星候选目标先聚类后检测等步骤完成对高轨目标的快速检测。
49.图像序列的配准对齐:
50.从观测距离上讲,人造卫星与自然天体到地基望远镜的距离相差甚远。当望远镜的观测方向不变时,观测目标的距离差异反应到成像平面上,就是人造卫星移动速度较快。通常有两种观测方式,其一是望远镜跟恒星观测,此时得到的观测图像序列中,恒星在前后两帧图像的位置是一致的,其二是跟卫星观测,此时前后两帧图像中的卫星目标位置是一
致的。不管是哪种观测方式,总的来讲都可以概括为人造卫星在自然天体中间穿梭移动。要实现这种效果,需要将多帧图像中的自然天体关于某特定帧(如序列的首帧)对齐,也就是体现先关联后检测的思想之处。
51.已有的基于特征点的图像配准方法能够达到的较好的对齐效果,但当进一步需要做到实时应用时,还存在计算量大、计算时间过长的问题,因此本发明进一步经过分析发现,通用算法中提取特征点(如角点)计算量较大,而实际中该特征点仅仅是用于对齐图像。为此,经过进一步分析,确定能够利用望远镜拍摄图像的本质特征,由于采用的是宽视场望远镜图像,一帧图像中会有成千上万颗恒星,而最亮的若干颗恒星(如50颗)的亮度比高轨卫星亮度高很多,因此可以直接选择视场内最亮的若干颗星(如50颗),将其对应的坐标点作为代表本图像的特征点,从而省去了在一般场景下计算图像特征点的繁琐过程。
52.在得到前后两帧图像的特征点集后,利用统计分析可以得出两特征点集之间的位移,如果存在图像旋转,还需额外得出旋转角度,从而确保图像配准,但对于地基大视场望远镜而言,一般成像时间间隔3秒,相邻帧之间的旋转角度几乎可以忽略不计,因此这里只考虑直线位移。注意到,两个特征点集不一定是一一对应的,也就是其中一个点集可能存在个别的特征点无法在另外一个点集中找到匹配点。但是前后两帧图像拍摄时间间隔较短(几秒),视场中绝大多数恒星在两帧图像中都存在,从而能够保证大多数点是能够匹配的。
53.具体的图像序列的配准算法,即从第二帧到第一帧图像的位移计算方法如图1所示。
54.首先,分别获取第一帧图像和第二帧图像中,各自最亮的前n个光源点在各自图像坐标系中的坐标,形成坐标集a和b;
55.其次,分别计算坐标集a中每个点到坐标集b中所有点的距离;对于坐标集a中某一点,得到其与坐标集b中所有点的距离的最小值,以及最小值对应的坐标集b中的点,进而由坐标集a中所有点各自对应的最小距离组成最小距离集合,并得到每个最小距离对应的点对;
56.再次,统计最小距离集合中的众数,当然考虑到实际测量误差,这里对最小距离集合中的元素进行误差截取后,进行众数统计,从而得到众数对应的若干最小距离,进而得到所述众数对应的若干最小距离对应的若干点对,这些点对就是第一帧图像与第二帧图像中相匹配的特征点对;
57.最后,利用特征点对中的某一点对,取x方向和y方向的坐标差值,即为第一帧图像和第二帧图像的位移量。
58.如此,可以得到地基大视场望远镜5帧连续拍摄图像中,第一帧图像与第二帧图像的位移量、第二帧图像与第三帧图像的位移量、第三帧图像与第四帧图像的位移量、第四帧图像与第五帧图像的位移量,并通过位移量累计,得到第三帧图像、第四帧图像以及第五帧图像与第一帧图像的位移量。
59.这样就是实现图像序列的配准,流程图的第3步,通过计算众数,即滤除野值,可以滤除个别无法匹配的点,从而保证大多数点的良好匹配。该算法简单高效,所需计算时间与检测图像中光源位置所需时间相比,可以忽略不计。
60.利用聚类算法滤除大多数恒星目标,并确定候选目标集
61.图像中光源位置绝大多数代表恒星,其中仅有很少的高轨卫星。例如某帧图像共
有超过10000个光源点,但仅含有5个高轨目标。如果能想办法滤除大多数恒星,从滤除后的卫星候选集中再筛选目标,就会极大的提高计算效率。这里采用聚类方法,利用光源的坐标(xy坐标)信息进行聚类。进一步的经过反复尝试发现,基于密度特征的聚类方法dbscan能够取得较好的效果。具体操作如下。
62.给定一个图像序列(连续5帧图像),采用前述配准方法,已经得到图像配准位移量,也就是第i帧(i》1)图像中光源位置相对于第1帧图像中的光源位置的平移量。据此,将图像序列中的光源位置统一对齐到第1帧图像的坐标系。将该图像序列中每帧图像中的光源点在第1帧图像坐标系下的坐标组合成矩阵m,该矩阵m规模为m*2,m代表5帧图像中的光源点总数,2代表两列,分别是x和y坐标。利用dbscan方法对矩阵m进行聚类,设置聚类中的两个关键参数为聚类样本的距离半径r
cluster
=3(即3个像素)和聚类的最小样本数量n
min
=2。聚类后,得到各个光源点的聚类标识,其中聚类成功的是要被滤除的恒星光源,聚类不成功的组成卫星候选目标集。
63.参数r
cluster
代表聚类簇中各个样本之间的距离,该值应该大于恒星对齐后的位置偏差,且小于卫星目标跨帧移动的像素数。由于连续多帧图像中的恒星位置已经对齐,所以同一个恒星在连续5帧图像中的位置之间的偏差很小(测试发现一般不大于1个像素),而卫星目标的相邻帧移动像素数通常超过十几个像素(如相邻帧成像时间间隔3秒,对应高轨卫星相对恒星移动角度约45角秒,而每个像素约2角秒,得到相邻帧移动像素约22.5个),而且大视场望远镜中各个光源之间的间距远大于3个像素,因此这里设置r
cluster
=3。参数n
min
代表聚类成功的各个簇所包含样本数量的最小值,设置为2代表滤除恒星的最低门限,能够最大程度上滤除恒星。
64.在本实施例中,每张图像中光源点经过滤除恒星后,进入到候选目标集的点数降低约一个数量级,如从1万个降低到1千个。
65.此外,由于图像配准过程中存在一定位移(典型值约跨帧20个像素),虽然该位移相对4k或6k分辨率的图像来讲微乎其微(漏检率忽略不计),但是如果处理不当,会影响恒星滤除效果,增加候选集光源数目,对后续目标检测不利。因此,在聚类滤除恒星之前,可以对矩阵m增加边界约束条件。如图2所示,前3帧图像对齐到第一帧坐标系后的效果图,实际参加聚类的坐标集为m矩阵中满足阴影约束条件(即重叠区域)的所有坐标点。例如,以第一帧左上角为原点,那么第二帧和第三帧中x坐标值或y坐标值小于0的点不参加聚类,此外第二帧和第三帧中x坐标值或y坐标值大于q-w的点也不参与聚类,其中q为第一帧图像的x坐标或y坐标最大值,如4k分辨率的图像,坐标最大值为4096,w为第五帧图像与第一帧图像的位移量。
66.利用聚类算法在候选目标集中检测卫星目标
67.经过滤除恒星,得到候选目标集后,利用高轨卫星目标的线性移动特征,先后从xy和tx(或ty)两个层次去检测直线,如采用ransac的方法、hough变换方法即可,这里的t、x、y分别代表时间轴、x轴和y轴,通过直线检测获得卫星目标点迹。但在实际应用中,我们发现该类方法需要遍历0到180度整个可能的直线方向区间,即便是按1
°
间隔划分,也需要循环180次,而对于5帧连续图像得到的候选集规模可能在5000个点(每帧1000个),如此计算量还是比较大的。为此,本发明进一步提出了先聚类后检测的方法,从而对候选目标集实现了分而治之。具体步骤如下:
68.采用dbscan对候选目标集进行聚类,设置r
cluster
=2*v*t,n
min
=3,其中v代表卫星目标预估移动速度(单位:像素/秒),t为跨帧成像时间间隔,也就是r
cluster
为卫星目标跨帧移动距离的2倍。实际应用中,可根据情况调整为2倍到8倍(因为高轨除了同步星还有大椭圆轨道星)。n
min
取值3是为折中考虑,小于3容易导致虚警率升高,超过3时,在5帧连续图像序列情况下,容易漏检。在目标呈直线分布情况下,一定会被聚成某个簇。如图3中情况(1)所示,存在三个目标点,按直线(通过设置阈值形成的近似直线)排列,当设置r
cluster
不小于其中连续两点之间的距离时,就能将图中三个黑色实心点聚成某个簇,即聚类成功。实际情况,可能存在第2个点没有在最开始的测光中检测出来,如图中情况(2)和情况(3)所示,此时需要增大r
cluster
以保证在同一直线上的三个点被聚类到一个簇中。也就是考虑将r
cluster
在2*v*t和8*v*t之间做优化调整。
69.聚类后得到多个簇,每个簇点数不小于3。可以采用传统方法如hough变换,得出每个簇中满足近似直线分布的点。由于此时每个簇点数相对于整个候选集来讲是极大降低的,一般至少降低2-3个数量级,结合多个簇的并行计算,总体上计算量是降低的。
70.而为了进一步提高计算速度,还可根据簇中的点数大小采取不同的直线检测方法。本实施例中,当簇中的点数小于8时,可采用遍历法快速确定点迹;否则,采用hough变换法。
71.遍历法:簇中各点均来自于当前序列的5帧图像,每次从各帧图像中选择一个点,组成一个点迹。结合各点坐标、时刻,按从第一帧到最后一帧的顺序计算速度,如果速度矢量(方向和模值)十分接近(达到一定门限),就认为该点迹符合高轨目标检测要求并记录输出。据此,可快速遍历实现高轨卫星目标快速检测。
72.hough变换法:对各簇点集进行xy和tx(或ty)两层hough变换直线检测,最后输出满足需求的目标点迹。首先经过xy检测得出在xy平面上呈近似直线分布的点迹,然后再次经过tx(或ty)检测,得出在tx(或ty)平面上亦满足直线特征的点迹并记录输出。
73.输出结果
74.输出结果需要注意,由于序列图像配准过程对各帧图像叠加了位移量,在输出结果前,需要从最终确定的目标坐标中去除该平移量,从而得出各帧图像中目标的具体坐标,也就是得到了每张原始图像中的目标位置。再结合原始图像中记录的图像中心对应的赤经、赤纬数据,和图像一个像素代表的角度值,即可得到目标对应的赤经、赤纬值。从而可用于结果验证和目标定轨。
75.结果分析
76.下面的观测数据来源于某型望远镜,图像分辨率为4096*4096。取连续拍摄的5帧图像,进行目标检测。经过光源检测、图像配准和聚类滤除恒星等操作得到如下结果。平均每帧处理时间不超过2秒。
77.光源检测和图像配准之后的结果如图4所示。该图包括5帧图像的所有光源,包括恒星和人造天体,共由85008个光源点,平均每帧约17000个。局部细节如图5所示,可见图像已经配准对齐,光源点线条颜色变深就是由来自多帧的光源叠加的效果。线条颜色较浅代表该光源仅来自于某帧图像。
78.利用聚类算法滤除大多数恒星目标,确定出候选目标集如图6所示,局部情况如图7所示。候选目标集的光源总数为3236个,平均每帧约647个。从滤除恒星前的85008个光源
骤减到3236个,可见聚类方法滤除恒星目标取得了良好效果。
79.利用聚类算法在候选目标集中检测卫星目标,共得到285个聚类簇,如图8所示,总共1187个候选点(之前为3236)。
80.对各个簇实施先xy直线检测,后tx直线检测。该过程可在多个簇中间并行处理。得到xy直线检测后结果如图9所示,tx直线检测后结果如图10所示。结果显示,最终检测图像中存在5个高轨卫星目标。
81.经过位移(补偿之前的图像配准位移)就可以输出5个高轨卫星目标的最终位置结果。
82.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1