一种基于隐马尔可夫模型的战场态势研判方法与流程
1.本发明属于电子对抗领域,具体涉及一种基于隐马尔可夫模型的战场态势研判方法。
背景技术:
2.态势信息是人们在面对高维数据系统中对目前情况的适应性理解,在空中管制、大型系统控制、医疗卫生、汽车驾驶、网络安全等领域都有所应用。随着战场信息化的飞速发展,战场信息已成为获得战场主动权的关键要素之一,而态势研判则是获取战场信息的主要手段。
3.战场态势研判的实质是对获取的战场信息进行逐层深入理解,逐步得到指挥员关注的隐含在态势信息中的各因素量化分析,是一个综合分析、逐步抽象的过程。在态势信息不完整的情况下,对战场态势的分析主要依靠已经掌握的信息,结合经验知识等进行多种猜测,并评估这些猜测的可信度。
4.目前基于概率模型的战场目标态势研判是研究的热点,主要包括,贝叶斯模型、最大熵模型、条件随机场、隐马模型、最大熵隐马模型。为了弥补条件随机场与最大熵模型的缺点,出现了基于多层次混合模型,如最大熵隐马尔可夫模型,其原理是通过一种模型进行粗切分,然后用另一种模型进行细切分。目前的基于隐马尔可夫模型的战场态势分析工具很少,复杂的代码结构限制了它的普及。本文针对隐马尔可夫模型的特点与态势分析相结合,设计并实现了基于隐马尔可夫模型的态势研判方法。
技术实现要素:
5.本发明提出了一种基于隐马尔可夫模型的战场态势研判方法,对态势信息进行分析,清洗和预处理,构建状态序列;利用样本态势数据初始化并且训练隐马尔可夫模型,对态势信息的四维数据量化处理,划分态势目标类别;依据隐马尔可夫模型对战场态势目标进行识别,完成态势目标的分类。
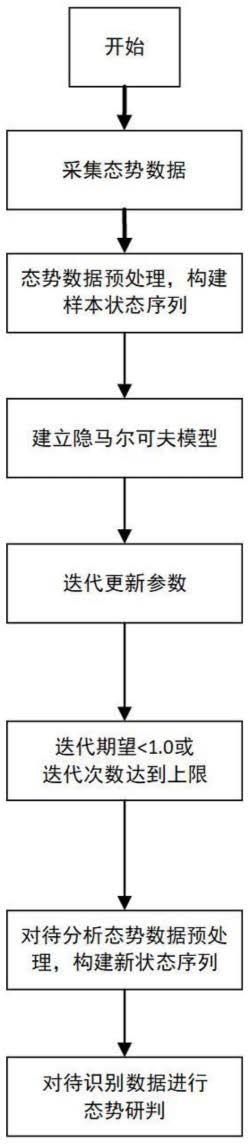
6.实现本发明的技术解决方案为:一种基于隐马尔可夫模型的战场态势研判方法,步骤如下:
7.步骤一、采集态势数据,并对战场态势数据进行清洗,得到有效态势信息,对有效态势信息的属性进行量化处理,构建态势状态序列,转入步骤二。
8.步骤二、通过态势状态序列建立隐马尔可夫模型,并对其进行训练。
9.步骤三、对待分析的态势数据进行预处理,得到预处理后的态势状态序列,量化态势目标等级因子,对态势信息进行。
10.本发明与现有技术相比,其显著优点在于:针对现代战场态势知识信息的不完整、不及时而造成的态势研判不准确的问题,提出了一种基于隐马尔可夫模型的战场态势研判方法,利于信息化战争中各级作战单位之间的战场态势感知共享。本发明通过人、机和环境系统相互间自主交互,完成人机并行的战场态势研判活动。
附图说明
11.图1为本发明的基于隐马尔可夫模型的战场态势研判方法流程图。
12.图2为态势研判模型图。
具体实施方式
13.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
14.下面将结合本设计实例对具体实施方式、以及本次发明的技术难点、发明点进行进一步介绍。
15.结合图1,本发明所述的一种基于隐马尔可夫模型的战场态势研判方法,步骤如下:
16.步骤一:采集态势数据,并对战场态势数据进行清洗,得到有效态势信息,对有效态势信息的属性进行量化处理,构建态势状态序列。
17.数据预处理的目的是生成供数据挖掘核心算法使用的目标数据,为后续进行的数据挖掘提供高可靠性、数据集规模适当、具有一定抽象性的数据,以提高聚类分析效率。
18.步骤1-1、采集战场态势数据,并对战场态势数据进行清洗,得到有效态势信息:
19.战场中的战场态势数据包括时间维度、空间维度、互作用对象、服务对象、平台支撑、数据支撑这六个维度的信息。
20.在战场态势数据的采集过程中,难免会有部分数据存在内容不完整,格式不一致、存放重复、信息缺失等情况,这些会对之后的战场态势展现和信息分产生影响,因此有必要对异常值进行处理。
21.基于邻近性将数据异常进行分类,为确定数据清洗提供依据。
22.基于上述原则,战场态势数据的清洗过程可通过以下步骤实现:
23.1-1-1)若变量的缺失率较高(大于80%),整体覆盖率较低(小于60%),可以直接将变量删除。
24.若变量缺失率较低(小于95%),则根据数据分布的情况进行填充,若需要填充的变量是连续型,采用均值法和随机差值进行填充,若变量是离散型,采用中位数或哑变量进行填充。
25.1-1-2)采取近邻排序法对重复记录进行识别、比较和排序,删除低价值的重复冗余数据。
26.1-1-3)对形式和内容不符合要求的数据进行纠正,对错误难以改正且不重要的数据采取删除整条记录的方法处理。
27.步骤1-2、上述有效态势信息有四维属性,按态势权重排序为目标距离sd、目标速度sv、目标高度sh、目标方向角sa。对四维属性进行量化处理,构建状态序列。
28.1-2-1)目标距离属性量化为:
[0029][0030]
其中,d为战场目标实际距离,d0为战场最大处置距离,α为目标量化因子,按照战
场目标类型来区分:
[0031][0032]
1-2-2)目标速度属性量化为:
[0033][0034]
其中v为战场目标速度,v0为相对观测速度。
[0035]
1-2-3)目标高度属性量化为:
[0036][0037]
其中h为战场目标实际高度,h0为战场最大处置高度。
[0038]
1-2-4)目标方向角属性量化为:
[0039][0040]
其中θ为战场目标当前方向角,θ0为相对观测角度。
[0041]
完成战场目标的态势属性量化后,得到态势数据观测集合m={m1,m2,......,mi},其中m中的每一个元素mi均为长度为n的状态序列。
[0042]
步骤二:通过态势状态序列建立隐马尔可夫模型,并对其进行训练,具体如下:
[0043]
马尔科夫模型是一个具有离散状态空间或者一个离散索引集合的马尔科夫过程。马尔科夫模型的状态转移矩阵收敛到的稳定概率分布与初始状态概率分布无关,这就是马尔科夫链的收敛性质,也就是说,如果得到了这个稳定概率分布对应的马尔科夫链模型的状态转移矩阵,则我们可以用任意的概率分布样本开始,带入马尔科夫链模型的状态转移矩阵,这样经过一些序列的转换,最终就可以得到符合对应稳定概率分布的样本。
[0044]
本文中隐马尔可夫模型的参数为其中π为初始概率矩阵,a为概率转移矩阵,b为状态输出矩阵。
[0045]
使用维特尔算法对隐马尔可夫模型进行初始化,态势数据观测集合作为输入。
[0046][0047]
其中为隐马尔可夫模型的迭代函数,k为迭代次数,为在mi序列输入下参数为的隐马尔可夫模型的条件概率,表示mi序列输入参数下模型参数集合为的贝叶斯概率,根据已知的状态序列求出最有可能产生该序列的隐马尔可夫模型的
[0048]
根据贝叶斯定理,展开条件概率,模型各参数分别为:
[0049][0050]
[0051][0052]
其中,j表示序列mi中第j个态势目标;
[0053]
每次迭代后更新模型为:
[0054][0055]
其中,πk为第k次迭代时的概率矩阵,ak为第k次迭代时的概率转移矩阵,bk为第k次迭代时的状态输出矩阵;
[0056]
模型参数期望为:
[0057][0058]
r(k+1)为第k+1次维特尔迭代期望,重复迭代过程,直到迭代期望r(k+1)《=1或迭代次数大于预设的迭代上限为止。迭代结束后得到态势数据观测集合训练后的隐马尔可夫模型。
[0059]
步骤三:利用训练好的隐马尔可夫模型完成态势数据研判,步骤如下:
[0060]
对态势数据进行与步骤一相同的预处理过程,得到量化后的态势信息状态序列o={o1,o2,......,on}。
[0061]
根据步骤一中量化的态势四维信息,量化预处理后的态势数据目标等级因数t为:
[0062][0063]
根据目标等级因数t把目标态势等分为高威胁度t1、中威胁度t2、低威胁度t3三类态势,如图2。
[0064]
利用训练好的隐马尔可夫模型对态势数据状态序列进行识别,n长度的状态序列模型输出结果为:
[0065][0066]
其中,ao(i)对状态序列o第i次迭代后的状态转移矩阵;bo(i)表示对状态序列o第i次迭代后的观测概率分布矩阵;πo(i)表示对状态序列o第i次迭代后的迭代向量阵;表示状态序列o输入下模型参数的贝叶斯概率。
[0067]
选择概率最大的隐马尔可夫模型作为识别结果,按照目标等级因数进行分类:
[0068][0069]
其中,r
λ
表示态势分类信息;p
max
表示公式(12)的输出识别结果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1