基于无人机的边坡地质素描方法与流程
1.本发明涉及边坡地质素描领域,尤其是涉及基于无人机的边坡地质素描方法。
背景技术:
2.地质素描是以野外客观地质实体为对象,用素描技法描绘其空间形态及相互关系的一项基础地质工作。边坡施工地质素描,主要描绘开挖坡面出露的地层岩性、地质界线、断层节理等结构面的空间位置及形态,量测记录其产状、延伸长度、宽度、表面形态及充填物等地质特征。
3.传统边坡施工地质素描,主要是利用绘图板、罗盘、皮尺等工具,在边坡开挖施工过程中,由地质技术人员到达工作现场,通过肉眼观察、手动描绘、人工量测等方式进行,素描工作效率低、误差大、环境差。当边坡高度较大时,采用传统边开挖边素描的方式,不仅耗时耗力,还存在严重的安全风险。
4.近年来,随着摄影测量、无人机、三维激光扫描等技术的不断发展,一些新的设备与方法逐渐应用到边坡施工地质素描之中。常见的方法主要有两种,一是通过数码相机获取边坡影像,利用影像开展地质素描,这种方法易受边坡高度和拍摄位置的限制,当边坡高度较高、摄影距离较远时,素描误差较大;二是利用三维激光扫描设备获取坡面点云数据,进而识别地质对象开展素描工作,这种方法的设备成本较高、点云数据处理复杂。
技术实现要素:
5.本发明目的在于提供一种基于无人机的边坡地质素描方法。
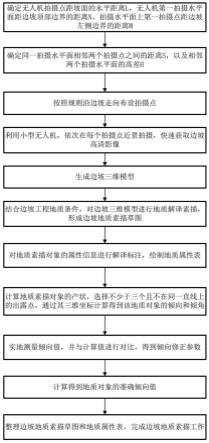
6.为实现上述目的,本发明采取下述技术方案:本发明所述的基于无人机的边坡地质素描方法,包括以下步骤:s1,根据无人机拍摄镜头的焦距f、影像分辨率d、像元尺寸ps确定无人机拍摄点距坡面的水平距离l、无人机第一拍摄水平面距边坡顶部或底部边界的距离n、所述拍摄水平面的第一所述拍摄点距边坡任一侧边界的距离m;该步骤确定了无人机拍摄的起始位置。
7.s2,确定同一拍摄水平面相邻两个拍摄点之间的距离s,以及相邻两个拍摄水平面的高差h;该步骤确定了边坡各拍摄点的布设规则s3,根据s1和s2步的参数,沿边坡走向布设拍摄点;结合s1步和s2步的参数,在该边坡上完成拍摄点的布设。
8.s4,控制无人机拍摄镜头垂直于边坡走向拍摄图像1张;拍摄镜头每向下旋转一定角度拍摄图像1张,共拍摄3次;调整镜头俯仰角度为0
°
,无人机机身每向左旋转一定角度拍摄图像1张,共拍摄3次;使镜头垂直于边坡走向,无人机机身每向右旋转一定角度拍摄图像1张,共拍摄3次;依布设的拍摄点重复以上操作,获取边坡影像;该步骤利用小型无人机通过多位置、多视角近景拍摄,快速获取边坡高清影像。
9.s5,根据所述拍摄图像,利用图像处理软件,生成边坡三维模型;s6,结合边坡工程地质条件,对所述边坡三维模型进行地质解译素描,形成边坡地
质素描草图;s7,对所述边坡地质素描对象的属性信息进行解译标注,绘制地质属性表;s8,计算边坡地质素描所述地质对象的产状,选择不少于三个且不在同一直线上的出露点,通过其三维坐标计算得到该地质对象的倾向和倾角;s9,选择边坡上的任一结构面,实地测量倾向值,并与计算值进行对比,得到倾向修正参数;s10,通过所述倾向修正参数,计算得到地质对象的准确倾向值;s11,整理边坡地质素描草图和地质属性表,形成边坡施工地质素描图。
10.进一步地,s1步中,所述距离l计算公式为:l=f
×
d/ps;所述距离m计算公式为:m=f
×
d/(2
×
ps) 所述距离n计算公式为:n=f
×
d/(3
×
ps);其中f为摄影镜头的焦距,d为影像分辨率,ps为像元尺寸的大小。
11.进一步地,s2步中所述距离s计算公式为:s=l
×
tan(fov
x
/2),所述高差h计算公式为:h=l
×
tan(fovy/2), 其中fov
x
为相机水平视场角;fovy为相机垂直视场角。
12.进一步地,s3步中当所述拍摄水平面某所述拍摄点距边坡任一侧边界的距离小于所述距离s时,拍摄水平面拍摄点布设完毕;当某拍摄水平面距边坡底部或顶部边界的距离小于所述距离h时,完成拍摄点布设。
13.进一步地,s4步中所述拍摄镜头每次旋转5
°
~15
°
。
14.进一步地,s6步中所述地质解译素描包括地层界线、岩性界线、断层迹线、节理迹线、裂隙迹线。
15.进一步地,s7步中所述属性信息包括所述地质素描对象的产状、充填物、表面形态、宽度。
16.进一步地,s10步中所述准确倾向值。
17.本发明的优点在于针对传统边坡施工地质素描问题和数码相机、三维激光扫描技术存在的技术缺点,提出了一种基于无人机近景摄影测量的边坡施工地质素描方法,利用小型无人机通过多位置、多视角近景拍摄,快速获取边坡高清影像,经过拼接处理后,生成三维高清坡面模型,进而开展地质信息解译、出露线勾绘和结构面产状计算工作,从而实现边坡施工地质素描信息获取。该方法无需设置控制点,设备轻便、操作简单、效率高、成本低、具有良好的地形适应能力,避免了传统施工地质素描的安全风险,提高了地质素描的工作效率和成果质量。
附图说明
18.图1是本发明所述方法流程图。
19.图2是本发明所述方法中拍摄点布置示意图。
20.图3是本发明所述方法中边坡三维模型展示图。
21.图4是本发明所述方法中边坡地质素描草图展示。
22.图5是本发明所述方法中完成的边坡地质素描图展示。
具体实施方式
23.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.以某水利枢纽工程进场道路开挖边坡为例,说明本发明所述的基于无人机的边坡地质素描方法的具体方法步骤:某水利枢纽工程进场道路边坡开挖长度约200m,高度约25m,坡度近90
°
,采用大疆精灵4pro v2.0小型四旋翼无人机,开展边坡施工地质素描工作。该无人机搭载1英寸2000万像素的云台相机,焦距为8.8mm,相元尺寸2.4μm,水平视场角67.7
°
,垂直视场角43.6
°
。
25.如图1所示,本发明所述的基于无人机的边坡地质素描方法的具体方法步骤:s1,根据无人机拍摄镜头的焦距f、影像分辨率d、像元尺寸ps确定无人机拍摄点距坡面的水平距离l,无人机第一拍摄水平面距边坡顶部边界的距离n、拍摄水平面上第一拍摄点距边坡左侧边界的距离m;在本实施例中,l=f
×
d/p
s =18m;m=f
×
d/(2
×
ps)=9m;n=f
×
d/(3
×
ps)=6m;其中f为摄影镜头的焦距,d为影像分辨率,ps为像元尺寸的大小。
26.s2,确定同一拍摄水平面相邻两个拍摄点之间的距离s,以及相邻两个拍摄水平面的高差h;在本实施例中,s=l
×
tan(fov
x
/2)=12m;h=l
×
tan(fovy/2)=7m;其中fov
x
为相机水平视场角;fovy为相机垂直视场角。
27.s3,根据s1和s2步的参数,按照一定的规则沿边坡走向布设拍摄点;如图2所示的边坡平面图。按照从上到下,从左到右的规则布设拍摄点。首先确定悬停位置距边坡顶部边界的距离n为6米,所在水平面为第一拍摄水平面。在该水平面上,以距边坡左侧边界的距离m为9米处布设第1拍摄点,向右平移12米布设第2拍摄点,即第2拍摄点与第1拍摄点之间的水平距离s为12米,依次在同一拍摄水平面设置拍摄点,直到该水平面最后一个拍摄点距边坡右侧边界的距离小于s即12米为止。
28.之后,根据相邻两个拍摄水平面的高差h为7米,确定第二拍摄水平面。在该水平面上,以距边坡右侧边界的距离m为9米处布设第5拍摄点,向左平移12米,布设第6拍摄点。依次在同一拍摄水平面设置拍摄点,直到该水平面最后一个拍摄点第9拍摄点距边坡左侧边界的距离小于s即12米为止。
29.根据相邻两个拍摄水平面的高差h为7米,确定第三拍摄水平面。在该水平面上,以距边坡左侧边界9米处布设第10拍摄点,向右平移12米,布设第11拍摄点。依次在同一拍摄水平面设置拍摄点,直到该水平面最后一个拍摄点第14拍摄点距边坡右侧边界的距离小于s即12米为止。
30.以此类推,直到拍摄水平面距底部边界的距离小于相邻两个拍摄水平面的高差h(7米)为止。
31.s4,依次在每个拍摄点,拍摄镜头垂直于边坡走向拍摄图像1张;拍摄镜头每向下旋转一定角度拍摄图像1张,共拍摄3次;调整镜头俯仰角度为0
°
,无人机机身每向左旋转一定角度拍摄图像1张,共拍摄3次;使镜头垂直于边坡走向,无人机机身每向右旋转一定角度拍摄图像1张,共拍摄3次;利用小型无人机通过多位置、多视角近景拍摄,快速获取边坡高
清影像。具体为:控制无人机悬停在距坡面的水平距离l,即18米的第一拍摄水平面的第1拍摄点,即图2所示的第1拍摄点处,首先设置无人机云台相机的镜头俯仰角度为0
°
,调整拍摄镜头朝向垂直于边坡走向,拍摄1张照片;然后在该拍摄点处,控制无人机云台相机的镜头向下旋转3次,每次旋转5
°
~15
°
,每旋转1次拍摄1张照片,共拍摄3张照片。继续在该拍摄点处,调整镜头俯仰角度为0
°
,控制无人机机身向左旋转3次,每次旋转5
°
~15
°
,每旋转1次拍摄1张照片,共拍摄3张照片。继续在该拍摄点处,使镜头朝向垂直于边坡走向,控制无人机机身向右旋转3次,每次旋转5
°
~15
°
,每旋转1次拍摄1张照片,共拍摄3张照片。到此完成该拍摄点处的拍摄。
32.控制无人机悬停在距坡面的水平距离l,即18米的第一拍摄水平面的第2拍摄点,即图2所示的第2拍摄点处,继续设置无人机云台相机的镜头俯仰角度为0
°
,调整拍摄镜头朝向垂直于边坡走向,拍摄1张照片;然后在该拍摄点处,控制无人机云台相机的镜头向下旋转3次,每次旋转5
°
~15
°
,每旋转1次拍摄1张照片,共拍摄3张照片。继续在该拍摄点处,将镜头俯仰角度调整至0
°
,控制无人机机身向左旋转3次,每次旋转5
°
~15
°
,每旋转1次拍摄1张照片,共拍摄3张照片。继续在该拍摄点处,使镜头朝向垂直于边坡走向,控制无人机机身向右旋转3次,每次旋转5
°
~15
°
,每旋转1次拍摄1张照片,共拍摄3张照片;完成该拍摄点处的拍摄。依次完成所有拍摄点的拍摄。
33.s5,根据拍摄图像,利用图像处理软件,生成边坡三维模型;如图3所示。
34.s6,结合边坡工程地质条件,对边坡三维模型进行地质解译素描,地质解译素描包括地层界线、岩性界线、断层迹线、节理迹线、裂隙迹线等,从而形成边坡地质素描草图;实现边坡施工地质素描信息获取。如图4所示。
35.s7,对地质素描对象的属性信息进行解译标注,绘制地质属性表;属性信息包括所述地质对象产状、充填物、表面形态、宽度等。如表1所示地质结构面产状信息如下:表1s8,计算地质素描对象的产状,选择不少于三个且不在同一直线上的出露点,通过其三维坐标计算得到该地质对象的倾向和倾角;s9,由于倾向属于方位角,计算结果存在一定偏差,需要进行修正处理;修正时选择边坡上的任一结构面,实地测量倾向值,并与计算值进行对比,得到倾向修正参数;在本实施例中为26
°
。
36.s10,通过倾向修正参数,计算得到地质对象的准确倾向值;准确倾向值。
37.s11,整理边坡地质素描草图和地质属性表,添加图框图例等内容,形成边坡地质素描图,完成边坡地质素描工作,如图5所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1