一种基于深度摄像模组的三维重建装置
1.本发明涉及三维采集重建技术领域,具体为一种基于深度摄像模组的三维重建装置。
背景技术:
2.古建筑经历了数千年发展,形成了独特而稳定的建筑体系。在保护古建筑的工作中,离不开对古建筑的修缮以及重建。中国古代建筑,外形古朴、华美,但形制结构非常复杂。一座单体建筑,往往由成千上万个构件组成,木构件之间通常是榫卯交接;其屋面曲线除多呈抛物线外,还常有很多种兽形饰件,这就使从古建图纸的绘制到三维模型重建都有很大的难度。
3.古建筑修缮重建的传统方法是利用二维图纸,实体建筑由技术人员手工量测后,将古建筑的各种信息绘制、记录、归纳成集。这种方法不仅耗时耗力,而且精确度较低,缺乏将记录的建筑信息直观表达的能力。
4.古建筑修缮重建,首先就是需要原始资料,所以古建筑测绘成为建筑保护的重中之重。目前,在修缮和重建也运用一些先进的测绘技术为古建筑保护提供快速、高质量的原始资料,比如:近景摄影测量和三维激光扫描技术,上述方法均需要先进行室外作业获取数据,再进行室内作业对数据进行处理,通过大量作业后的到建筑复原模型,在这过程中,耗费的非常多的人力物力,同时效率不高,并且,常见的三维重建方式是通过物体在不同光照条件下的灰度差异估计物体表面法向量,其优势是对纹理细节的恢复能力突出,但是对光源参数的标定要求高,在还原精度受到光源与相机安装误差的影响,因此,提出一种基于深度摄像模组的三维重建装置。
技术实现要素:
5.本部分的目的在于概述本发明的实施方式的一些方面以及简要介绍一些较佳实施方式。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
6.为解决上述技术问题,根据本发明的一个方面,本发明提供了如下技术方案:
7.一种基于深度摄像模组的三维重建装置,其包括:
8.拍摄模组、数据信息处理器、云构建终端和三维构件模组;
9.其中,三维重建步骤为:
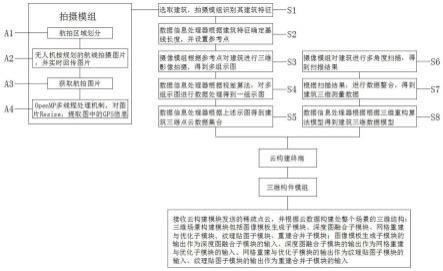
10.s1、选取建筑,拍摄模组识别其建筑特征;
11.s2、数据信息处理器根据建筑特征确定基线长度,并设置参考点;
12.s3、摄像模组根据参考点对建筑进行三维影像拍摄,得到多组示图;
13.s4、数据信息处理器根据视差算法,对多组示图进行数据处理得到一组示图;
14.s5、数据信息处理器根据上述示图得到建筑三维点云数据集合;
15.云构建终端,用于执行利用图像的中gps信息作为先验信息,只对相邻的图像进行特征匹配。
16.作为本发明所述的一种基于深度摄像模组的三维重建装置的一种优选方案,其中:所述拍摄模组的拍摄步骤为;
17.a1、航拍区域划分;
18.a2、无人机按规划的航线拍摄图片,并实时回传图片;
19.a3、数据信息处理器获取航拍图片;
20.a4、openmp多线程处理机制,对图片resize,提取图中的gps信息。
21.作为本发明所述的一种基于深度摄像模组的三维重建装置的一种优选方案,其中:所述三维重建步骤还包括:
22.s6、摄像模组对建筑进行多角度扫描,得到扫描结果;
23.s7、根据扫描结果,进行数据整合,得到建筑三维测量数据;
24.s8、数据信息处理器根据根据三维重构算法模型得到建筑三维数据模型。
25.作为本发明所述的一种基于深度摄像模组的三维重建装置的一种优选方案,其中:所述三维构件模组用于执行接收云构建模块发送的稀疏点云,并根据云数据构建处整个场景的三维结构,三维场景构建模块包括图像模板生成子模块、深度图融合子模块、网格重建与优化子模块、纹理贴图子模块、重建合并子模块;
26.图像模板生成子模块的输出作为深度图融合子模块的输入、深度图融合子模块的输出作为网格重建与优化子模块的输入、网格重建与优化子模块的输出作为纹理贴图子模块的输入、纹理贴图子模块的输出作为重建合并子模块的输入。
27.作为本发明所述的一种基于深度摄像模组的三维重建装置的一种优选方案,其中:所述云构建终端所包含的特征匹配子模块,用于利用图像的中gps 信息作为先验信息,只对相邻的图像进行特征匹配,在匹配的过程中,对于误匹配的情况,采用随机抽样一致(randomsampleconsensus,ransac)算法来剔除误匹配的点。
28.作为本发明所述的一种基于深度摄像模组的三维重建装置的一种优选方案,其中:还包括用于在拍摄前对光源进行校准的光源校准模组;
29.其中,光源校准模组包括拍摄环节、准备环节和运算环节;
30.d1、拍摄环节下由拍摄模组拍摄,获得图像信息,在准备环节中,将拍摄的图像信息进行灰度化处理,运算环节获得误差系数取最小值时的偏移坐标记为最适坐标;
31.d2、运算环节结束后如果所述的检测步长大于2像素,则将检测网格中与最适坐标重合的格点距离大于检测步长的格点删除,将所述的检测步长减半并在所述的检测网格中添加新的格点;
32.d3、检测网格在添加了所述的格点后,相邻格点的距离为检测步长,检测网格面积不增加,且检测步长小于2像素,则将所述的最适坐标记为最佳偏移坐标;
33.d4、控制器控制光源组内部的各个光源依次点亮,并在每个光源点亮后控制拍摄模组拍摄放置于光源组与相机前方模板,获得的一组照片称为第一平面图像;
34.d5、以所述的第一平面图像所在平面为xy平面,以第一平面图像左上角为原点建立三维直角坐标系;
35.在图像处理器设置检测步长,沿x,y轴方向建立平行于xy平面的检测网格,相邻格
点间距为所述的检测步长,所述的三维直角坐标系的z轴经过其中某一格点之一,相机位置与所述的检测网格共面,并且所述的检测网格向 z=0平面的投影全部位于所述的第一平面图象以内,当满足上述数据后,校准成功。
36.作为本发明所述的一种基于深度摄像模组的三维重建装置的一种优选方案,其中:所述云构建终端与三维构件模组之间通过无线传输模组建立数据信息传输通道。
37.作为本发明所述的一种基于深度摄像模组的三维重建装置的一种优选方案,其中:所述的特征匹配子模块,采用快速层级哈希匹配方法对相邻图像之间进行特征匹配,利用局部敏感哈希将一个图像上的特征点映射成为一个哈希编码,在利用特征计算两幅图像之间匹配的时候,对于第一幅图像上的某个特征点,搜索第二幅图像上和该特征点哈希编码的欧式距离小于某个阈值的特征点,然后根据特征描述符的相似性和比率测试确定最终的匹配。
38.与现有技术相比:能够实现准实时三维重建,依据无人机图像快速生成目标区域的三维地理环境,相较于其他传统测绘方法,时效性强,并且适合机动侦察和区域监控等领域应用,三维重建高清晰特点,无人机飞行高度可控、图像分辨率可调;
39.通过内置的三维重建算法,调整算法中的光源位置参数,利用在拍摄环节以平面模板为对象拍摄的一组照片对平面模板进行三维重建,将重建结果拟合为平面并计算重建结果与平面之间的差异,确定最佳光源位置参数。
附图说明
40.为了更清楚地说明本发明实施方式的技术方案,下面将结合附图和详细实施方式对本发明进行详细说明,显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
41.图1为本发明整体结构示意图。
具体实施方式
42.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。
43.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施方式的限制。
44.其次,本发明结合示意图进行详细描述,在详述本发明实施方式时,为便于说明,表示器件结构的剖面图会不依一般比例作局部放大,而且所述示意图只是示例,其在此不应限制本发明保护的范围。此外,在实际制作中应包含长度、宽度及深度的三维空间尺寸。
45.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式作进一步地详细描述。
46.本发明提供一种基于深度摄像模组的三维重建装置,请参阅图1,包括,拍摄模组、数据信息处理器、云构建终端和三维构件模组;
47.三维构件模组用于执行接收云构建模块发送的稀疏点云,并根据云数据构建处整
个场景的三维结构,三维场景构建模块包括图像模板生成子模块、深度图融合子模块、网格重建与优化子模块、纹理贴图子模块、重建合并子模块;
48.图像模板生成子模块的输出作为深度图融合子模块的输入、深度图融合子模块的输出作为网格重建与优化子模块的输入、网格重建与优化子模块的输出作为纹理贴图子模块的输入、纹理贴图子模块的输出作为重建合并子模块的输入;
49.其中,三维重建步骤为:
50.s1、选取建筑,拍摄模组识别其建筑特征;
51.s2、数据信息处理器根据建筑特征确定基线长度,并设置参考点;
52.s3、摄像模组根据参考点对建筑进行三维影像拍摄,得到多组示图;
53.s4、数据信息处理器根据视差算法,对多组示图进行数据处理得到一组示图;
54.s5、数据信息处理器根据上述示图得到建筑三维点云数据集合;
55.s6、摄像模组对建筑进行多角度扫描,得到扫描结果;
56.s7、根据扫描结果,进行数据整合,得到建筑三维测量数据;
57.s8、数据信息处理器根据根据三维重构算法模型得到建筑三维数据模型。
58.拍摄模组的拍摄步骤为;
59.a1、航拍区域划分;
60.a2、无人机按规划的航线拍摄图片,并实时回传图片;
61.a3、数据信息处理器获取航拍图片;
62.a4、openmp多线程处理机制,对图片resize,提取图中的gps信息。
63.光源进行校准的光源校准模组;
64.其中,光源校准模组包括拍摄环节、准备环节和运算环节;
65.d1、拍摄环节下由拍摄模组拍摄,获得图像信息,在准备环节中,将拍摄的图像信息进行灰度化处理,运算环节获得误差系数取最小值时的偏移坐标记为最适坐标;
66.d2、运算环节结束后如果的检测步长大于2像素,则将检测网格中与最适坐标重合的格点距离大于检测步长的格点删除,将的检测步长减半并在的检测网格中添加新的格点;
67.d3、检测网格在添加了的格点后,相邻格点的距离为检测步长,检测网格面积不增加,且检测步长小于2像素,则将的最适坐标记为最佳偏移坐标;
68.d4、控制器控制光源组内部的各个光源依次点亮,并在每个光源点亮后控制拍摄模组拍摄放置于光源组与相机前方模板,获得的一组照片称为第一平面图像;
69.d5、以的第一平面图像所在平面为xy平面,以第一平面图像左上角为原点建立三维直角坐标系;
70.在图像处理器设置检测步长,沿x,y轴方向建立平行于xy平面的检测网格,相邻格点间距为的检测步长,的三维直角坐标系的z轴经过其中某一格点之一,相机位置与的检测网格共面,并且的检测网格向z=0平面的投影全部位于的第一平面图像以内,当满足上述数据后,校准成功。
71.虽然在上文中已经参考实施方式对本发明进行了描述,然而在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本发明所披露的实施方式中的各项特征均可通过任意方式相互结合起来使
用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本发明并不局限于文中公开的特定实施方式,而是包括落入权利要求的范围内的所有技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1