一种基于蓝牙定位的室内数字孪生场景运动精度修正方法与流程
1.本发明涉及室内数字孪生场景运动领域,具体是指一种基于蓝牙定位的室内数字孪生场景运动精度修正方法。
背景技术:
2.密歇根大学教授michael grieves博士在2002年首次将数字孪生体的概念应用于制造业,并正式宣布了数字孪生软件概念。美国宇航局的约翰
·
维克斯(johnvickers)在2010年正式引入了“数字孪生”的术语。所述的数字孪生是指充分利用物理模型、传感器更新、运行历史等数据,集成多学科、多物理量、多尺度、多概率的仿真过程,在虚拟空间中完成映射,从而反映相对应的实体装备的全生命周期过程。数字孪生是一种超越现实的概念,可以被视为一个或多个重要的、彼此依赖的装备系统的数字映射系统。
3.数字孪生作为5g产业链条中一个重要的衍生应用环节,数字孪生可促进物联网成型和物联网设备数字化,与5g三大场景之一的万物互联需求强耦合。今后5g时代,随着新一代信息技术加快与实体经济的融合,工业的数字化、网络化、智能化的演进趋势日益明显,将催生一批制造业数字化转型新模式、新业态。
4.但在目前的数字孪生应用场景中,由于从外界所捕获的位置信息存在较大偏差,因此当其应用于虚拟场景中时,往往就会出现人物卡墙或者人物偏离实际位置的情况,甚至更有人物漂移到建筑之外的情况出现。因此,如何在数字孪生应用场景中解决相应对象的定位以及修正其运动轨迹便是当前亟需解决的技术难题。
技术实现要素:
5.本发明的目的在于克服上述问题,提供一种基于蓝牙定位的室内数字孪生场景运动精度修正方法。
6.本发明通过以下技术方案来实现:一种基于蓝牙定位的室内数字孪生场景运动精度修正方法,主要包括以下步骤:
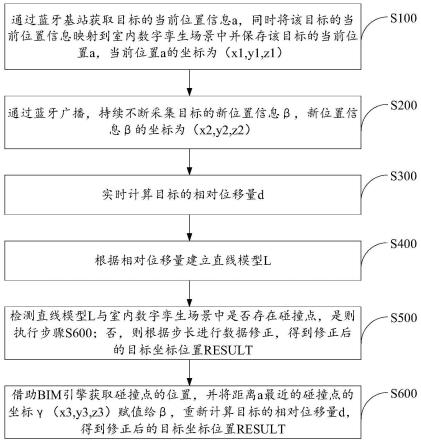
7.s100、通过蓝牙基站获取目标的当前位置信息a,同时将该目标的当前位置信息映射到室内数字孪生场景中并保存该目标的当前位置a,当前位置a的坐标为 (x1,y1,z1);
8.s200、通过蓝牙广播,持续不断采集目标的新位置信息β,新位置信息β的坐标为(x2,y2,z2)
9.s300、实时计算目标的相对位移量d;
10.s400、根据相对位移量建立直线模型l;
11.s500、检测直线模型l与室内数字孪生场景中是否存在碰撞点,是则执行步骤s600;否,则根据步长进行数据修正,得到修正后的目标坐标位置result;
12.s600、借助bim引擎获取碰撞点的位置,并将距离a最近的碰撞点的坐标γ (x3,y3,z3)赋值给β,重新计算目标的相对位移量d,得到修正后的目标坐标位置result。
13.进一步地,步骤s300中所述的“实时计算目标的相对位移量d”,其计算公式为d2=
(x2-x1)2+(y2-y1)2,其中z的取值为0。
14.作为本发明的优选实施方式,步骤s500所述的“检测直线模型l与室内数字孪生场景中是否存在碰撞点”,其是采用bim碰撞检测工具进行检测,其检测结果赋值给布尔量c;当布尔量c=false时,表示不存在碰撞点;当c=true时,表示存在碰撞点。
15.进一步地,步骤s500中所述“根据步长进行数据修正”,其具体包括以下内容:
16.(1)当d》52cm,则在α与β直线方向上取令d=52的坐标点,并将该点赋值给目标坐标位置result,得到修正后的目标坐标位置result(x,y,z);
17.(2)当d《52cm,则直接将β赋值给result,得到修正后的目标坐标位置result (x,y,z)。
18.步骤s600中所述的“重新计算目标的相对位移量d,得到修正后的目标坐标位置result”,其具体包括以下内容:
19.当d《30cm,丢弃该β值,认为目标没有移动;
20.当30cm《d《(52cm+30cm),则在α与β直线方向上取偏离γ坐标30cm的坐标点,并将该点赋值给目标坐标位置result,得到修正后的坐标位置result (x,y,z);
21.当d》(52cm+30cm),则在α与β直线方向上取偏离α坐标52cm的坐标点,并将该点赋值给目标坐标位置result,得到修正后的坐标位置result(x,y,z)。
22.本发明与现有技术相比,具有以下优点及有益效果:
23.本发明开创性的将蓝牙定位技术和bim碰撞检测技术结合在一起来解决室内数字孪生场景运动的精度问题,通过本发明,能显著的提高现有虚拟孪生场景中的精度问题,能有效避免目标漂移到建筑外以及卡墙等情况的出现。
附图说明
24.图1为本发明的整体流程示意图。
具体实施方式
25.下面结合实施例对本发明作进一步的详细说明,但本发明的实施方式不限于此。
26.实施例
27.本发明的主要原理是利用蓝牙定位技术、bim分析技术、人类生物学分析技术、计算机视觉、机器学习及深度神经网络等技术,根据人类普遍步长、场景运动相关性、模型内道路宽度及bim模型碰撞等技术来智能地修正目标可能卡墙或者偏离正常建筑的情况。本实施中的目标可以为人物或其他需要虚拟显示的各种物件。
28.本实施例中所述的目标以人物为例来进行说明,在应用本发明时,首选需要通过扫描二维码,打开蓝牙终端设备(以手机设备为例),获取物理环境中的真实位置之后,再将人物模型导入模型到虚拟场景当中的对应位置,且保持蓝牙寻呼广播。当人物在物理环境中运动时,人物所持蓝牙设备将向基站发送实时定位。本发明的上位机收到位置后,将位置数据交给算法进行识别,计算中人物在虚拟场景中的位置,当该位置与建筑物墙体、家具等物品存在碰撞时,且超出正常步长时,将会修正模型移动后的位置数据,并将该修正后的位置数据传递给图形引擎进行实时动画显示。
29.如图1所示,本实施例所述的基于蓝牙定位的室内数字孪生场景运动精度修正方
法,主要包括以下步骤:
30.s100、通过蓝牙基站获取目标的当前位置信息a,同时将该目标的当前位置信息映射到室内数字孪生场景中并保存该目标的当前位置a,当前位置a的坐标为 (x1,y1,z1)。
31.s200、通过蓝牙广播,持续不断采集目标的新位置信息β,新位置信息β的坐标为(x2,y2,z2)。
32.s300、实时计算目标的相对位移量d。
33.该步骤中,目标的相对位移量采用d=β(x2,y2,z2)-α(x1,y1,z1)计算所得。由于本实施例中的目标为平面移送,因此z的取值为0。故,目标的相对位移量d的计算公式为d2=(x2-x1)2+(y2-y1)2,即
34.s400、根据相对位移量建立直线模型l。
35.s500、检测直线模型l与室内数字孪生场景中是否存在碰撞点,是则执行步骤s600;否,则根据步长进行数据修正,得到修正后的目标坐标位置result。
36.在该步骤中,所述的“检测直线模型l与室内数字孪生场景中是否存在碰撞点”,其是采用bim碰撞检测工具进行检测。本实施例将其检测结果赋值给布尔量c;当布尔量c=false时,表示不存在碰撞点;当c=true时,表示存在碰撞点。
37.当系统判定该直线模型l与室内数字孪生场景中不存在碰撞点时,便根据步长进行数据修正,其具体包括以下内容:
38.(1)当d》52cm,则在α与β直线方向上取令d=52的坐标点,并将该点赋值给目标坐标位置result,得到修正后的目标坐标位置result(x,y,z)。
39.(2)当d《52cm,则直接将β赋值给result,得到修正后的目标坐标位置result (x,y,z)。
40.s600、借助bim引擎获取碰撞点的位置,并将距离a最近的碰撞点的坐标γ (x3,y3,z3)赋值给β,重新计算目标的相对位移量d,得到修正后的目标坐标位置result。
41.该步骤中所述的“重新计算目标的相对位移量d,得到修正后的目标坐标位置result”,其具体包括以下内容:
42.当d《30cm,丢弃该β值,认为目标没有移动。
43.当30cm《d《(52cm+30cm),则在α与β直线方向上取偏离γ坐标30cm的坐标点,并将该点赋值给目标坐标位置result,得到修正后的坐标位置result (x,y,z)。其中,30cm是以人正常观看事物至少保持30cm的常识为考量。
44.当d》(52cm+30cm),则在α与β直线方向上取偏离α坐标52cm的坐标点,并将该点赋值给目标坐标位置result,得到修正后的坐标位置result(x,y,z)。其中,52cm是以人正常行走步长为52cm为考量。
45.如上所述,便可很好的实现本发明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1