一种基于无人机负载DR数字成像的金具压接缺陷评价系统以及评价方法与流程
一种基于无人机负载dr数字成像的金具压接缺陷评价系统以及评价方法
技术领域
1.本发明涉及输电线路连接金具缺陷检测技术领域,具体涉及一种基于无人机负载dr数字成像的金具压接缺陷评价系统。
背景技术:
2.连接金具作为输电线路三大核心部件之一,是导线与铁塔之间连接的“关节”,是输电线路结构稳定性和能量传输连续性的前提保证。
3.国内施工单位一般通过人工方式对导地线耐张线夹、接续管压接后的外观尺寸进行对边距检测,此方法不能评判金具内部的实际压接情况。检测机构一般对导地线耐张线夹、接续管采用握力试验的检测方法,但此方法只能作为一种抽查检测,因为试验会带来导地线金具的损耗。近年来,部分施工单位和科研院所曾研究过导线压接质量无损检测方法,利用x射线作为辐射源的工业计算机层析照相,去检测钢芯铝绞线耐张线夹的压接质量,但目前输电线路耐张线夹x射线检测主要通过人工登塔作业进行,这种方式在一些条件恶劣如跨江跨河或高山峻岭地区难度很大,不仅劳动强度大、工作条件艰苦,而且检测效率极其低下。另外因为射线具有强烈的辐射性,检验人员必须穿着特殊的防辐射服进行登高作业,具有相当的危险性。且在缺陷评价方面,后期压接评判主要依赖人工,且缺少评判标准作为支撑,评判的效率和准确性都不甚理想。
技术实现要素:
4.本发明的目的是为解决解决金具压接图像采集人工作业风险高、劳动强度大,人工缺陷评判效率低、准确性差的问题,提供一种基于无人机负载dr数字成像的金具压接缺陷评价系统。
5.本发明为解决上述技术问题的不足,所采用的技术方案是:一种基于无人机负载dr数字成像的金具压接缺陷评价系统,包括智能评价子系统、无人机飞行子系统以及x射线数字成像子系统,所述无人机飞行子系统上搭载有x射线数字成像子系统,用于控制x射线数字成像子系统在作业期间移动;x射线数字成像子系统用于采集金具压接状态图像;智能评价子系统用于分析数字成像子系统采集的金具压接状态图像,并对金具压接状态进行评价。
6.作为本发明一种基于无人机负载dr数字成像的金具压接缺陷评价系统的进一步优化,所述无人机飞行子系统包括无人机机身以及设置在无人机机身上的动力组件和控制组件,所述无人机机身底部两端均设有起落支架,无人机机身底部设有第一视角摄像头,且第一视角摄像头位于两个起落支架之间。
7.作为本发明一种基于无人机负载dr数字成像的金具压接缺陷评价系统的进一步优化,所述x射线数字成像子系统包括脉冲式x射线机、平板探测器以及辅助工装,所述脉冲式x射线机的射线端朝向平板探测器,脉冲式x射线机与平板探测器通过辅助工装连接。
8.作为本发明一种基于无人机负载dr数字成像的金具压接缺陷评价系统的进一步优化,所述x射线数字成像子系统通过绳索挂设在无人机飞行子系统上。
9.一种基于无人机负载dr数字成像的金具压接缺陷评价方法,基于上述金具压接缺陷评价系统,评价方法具体包括以下步骤:
10.1)无人机飞行子系统将x射线数字成像子系统移动至金具压接处,使x射线数字成像子系统采集金具压接状态图像;
11.2)智能评价子系统获取多个带标识的x射线图;
12.3)对带标识的x射线图像进行预处理,并将预处理后的x射线图像分成训练集和测试集;
13.4)利用训练集对预先构建的基于卷积神经网络的图像识别模型进行训练,利用测试集对训练后的图像识别模型进行测试;
14.5)最后智能评价子系统利用测试后的图像识别模型对x射线数字成像子系统采集的金具压接状态图像进行识别,并评价金具压接的状态。
15.作为本发明一种基于无人机负载dr数字成像的金具压接缺陷评价方法的进一步优化,所述1)中多个带标识的x射线图像包括正常压接图像、凹凸槽漏压缺陷图像、凹凸槽欠压缺陷图像、铝管过压缺陷图像、锚管与芯线漏压缺陷图像以及钢锚弯曲缺陷图像。
16.作为本发明一种基于无人机负载dr数字成像的金具压接缺陷评价方法的进一步优化,所述3)中图像识别模型包括多个通道特征权重提取模块,通道特征权重提取模块用于获取图像特征提取过程中每个通道的权重系数,放大权重靠前的通道特征、抑制权重靠后的通道特征。
17.作为本发明一种基于无人机负载dr数字成像的金具压接缺陷评价方法的进一步优化,所述3)中的卷积神经网络基于yolov4算法构建。
18.本发明具有以下有益效果:
19.一、通过无人机飞行子系统以及x射线数字成像子系统配合解决压接图像采集人工作业风险高、劳动强度大的问题;
20.二、通过智能评价子系统代替人工缺陷评判效率低、准确性差的问题。
附图说明
21.图1为无人机飞行子系统的结构示意图;
22.图2为x射线数字成像子系统的结构示意图;
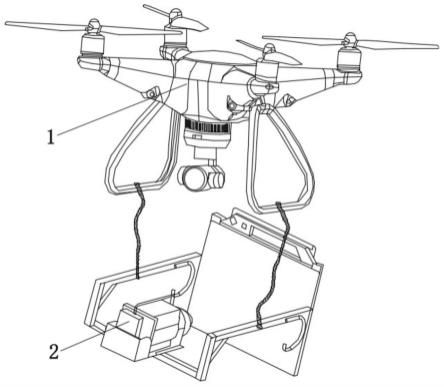
23.图3为载有x射线数字成像子系统的无人机飞行子系统示意图;
24.图4为评价系统工作状态示意图;
25.图5为yolov4算法原理图的结构示意图;
26.图6为yolov4算法的网络模型结构示意图;
27.图7为压接无缺陷图谱;
28.图8为压接凹凸槽漏压缺陷图谱;
29.图9为压接铝管过压缺陷图谱;
30.图10为压接锚管和芯线漏压缺陷图谱;
31.图11为钢锚弯曲缺陷图谱。
32.附图标记:1、无人机飞行子系统,101、动力组件,102、第一视角摄像头,103、控制组件,104、起落支架104,105、无人机机身,2、x射线数字成像子系统,201、脉冲式x射线机,202、平板探测器,203、辅助工装。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
34.如图1-6所示,一种基于无人机负载dr数字成像的金具压接缺陷评价系统,包括无人机飞行子系统1以及设置在无人机飞行子系统1上的x射线数字成像子系统2和智能评价子系统,无人机飞行子系统1通过吊绳装载x射线数字成像子系统2,并将x射线数字成像子系统2送至金具压接处,并通过x射线数字成像子系统2对金具压接处进行压接质量图像的采集,最后通过智能评价子系统对采集的压接质量图像进行评价分析。
35.无人机飞行子系统1包括无人机机身105以及设置在无人机机身105上的动力组件101和控制组件103,无人机机身105底部两端均设有起落支架104,无人机机身105底部设有第一视角摄像头102,且第一视角摄像头102位于两个起落支架104之间。
36.x射线数字成像子系统2包括脉冲式x射线机201、平板探测器202以及辅助工装203,脉冲式x射线机201的射线端与平板探测器202对应,脉冲式x射线机201与平板探测器202通过辅助工装203连接。
37.辅助工装203上设有绳索,并通过绳索与无人机机身105底部的起落支架104连接,使x射线数字成像子系统2固定在无人机机身105底部。
38.金具压接缺陷评价系统的评价方法具体包括以下步骤:
39.1)无人机飞行子系统1将x射线数字成像子系统2移动至金具压接处,使x射线数字成像子系统2采集金具压接状态图像;
40.2)智能评价子系统获取多个带标识的x射线图;
41.3)对带标识的x射线图像进行预处理,并将预处理后的x射线图像分成训练集和测试集;
42.4)利用训练集对预先构建的基于卷积神经网络的图像识别模型进行训练,利用测试集对训练后的图像识别模型进行测试;
43.5)最后智能评价子系统利用测试后的图像识别模型对x射线数字成像子系统2采集的金具压接状态图像进行识别,并评价金具压接的状态。
44.1)中多个带标识的x射线图像包括正常压接图像、凹凸槽漏压缺陷图像、凹凸槽欠压缺陷图像、铝管过压缺陷图像、锚管与芯线漏压缺陷图像以及钢锚弯曲缺陷图像。通过对金具不同压接状态的x光线夹图像进行采集、分类、标注,使这些带有标识的x射线图像作为与采集的金具压接状态图进行比较的数据库,对算法判断金具压接的状态提供数据支持。
45.2)中图像识别模型包括多个通道特征权重提取模块,通道特征权重提取模块用于获取图像特征提取过程中每个通道的权重系数,放大权重靠前的通道特征、抑制权重靠后的通道特征。
46.3)中的卷积神经网络基于yolov4算法构建,为实现效果最佳的实时高精度检测,本发明选取一阶段深度学习目标检测算法yolov4作为基础网络。yolov4算法首先将输入图
像分割成k*k的栅格网格,然后每个网格负责检测中心坐标位于网格内的目标,同时网格内会预测边框的位置坐标和边框的置信度,最后对预测边框进行筛选时使用非极大值抑制算法选出最优边框。yolov4算法检测网络是由改进的输入端、基于cspdarknet53的特征提取网络、spp(spatialpyramidpooling)附加模块、panet(pathaggregationnetwork)特征融合模块以及基于锚框机制的yolov3预测模块组成的体系结构。
47.卷积神经网络是一种带有卷积结构的深度神经网络,卷积神经网络成功的原因在于其所采用的局部连接和权值共享:一方面减少了权值的数量使得网络易于优化;另一方面降低了模型的复杂度,也就是减小了过拟合的风险。这两个特点在网络的输入是图像时表现的更为明显,使得图像可以直接作为网络的输入,避免了传统识别算法中复杂的特征提取和数据重建的过程,在二维图像的处理过程中有很大的优势,如网络能够自行抽取图像的特征包括颜色、纹理、形状及图像的拓扑结构,在处理二维图像的问题上,特别是识别位移、缩放及其他形式扭曲不变性的应用上具有良好的鲁棒性和运算效率等。
48.yolov4算法是对yolov3算法改进优化而来的(其网络模型结构如图6所示),yolov4算法的主干特征提取网络(backbone)部分将cspnet网络结构与darknet53中的残差模块结合在一起,以增强网络的学习效率、减少计算参数量,故检测精度比yolov3网络有很大的提升。neck部分采用空间金字塔池化、特征金字塔和路径聚合网络方式。spp模块的加人提高了图像的尺度不变性,降低了过拟合,使得主干特征的接收范围增大,显著分离了重要的上下文信息。fpn+pan结构,是通过fpn将高层的强语义特征传递下来,以增强了整个特征金字塔;在后面添加一个自底向上的金字塔,将低层次的强定位特征传递上去,弥补了金字塔仅增强语义信息、缺失定位信息的短板。yolo-head部分采用ciou_loss和diou_nms算法,提升了检测框的检测精度与速度。
49.采用数字dr成像检测技术和基于神经网络的人工智能技术,在停电检修状态下,对输电线路耐张线夹压接质量进行现场在线检测,通过对不同x光线夹图像进行采集、分类、标注和训练后,实现铝股、钢芯、线夹铝套管和钢卯的位置自动识别和检测,并通过尺寸测量,判断压接管中钢卯是否弯曲,铝套管压接是否到位、压接是否紧固、压接有无裂纹等缺陷。如图7-11示出了本发明金具压接缺陷评价系统在实际应用过程中的图,其中图7为压接无缺陷图谱,图8为压接凹凸槽漏压缺陷图谱,图9为压接铝管过压缺陷图谱;图10为压接锚管和芯线漏压缺陷图谱,图11为钢锚弯曲缺陷图谱。
50.本发明主要解决金具压接图像采集人工作业风险高、劳动强度大,人工评判效率低、准确性差的问题,通过无人机飞行子系统1和x射线数字成像子系统2的配合对金具压接处进行压接质量图像的采集,最后通过智能评价子系统对采集的压接质量图像进行评价分析。智能评价子系统采用dr数字成像检测技术和基于神经网络的人工智能技术,智能评价子系统通过对不同x光线夹图像进行采集、分类、标注和训练后,实现铝股、钢芯、线夹铝套管和钢锚的位置自动识别和检测,判断线夹压接是否存在凹凸槽漏压、凹凸槽欠压、铝管过压、锚管和芯线漏压、钢锚弯曲等缺陷,无人机飞行子系统1和x射线数字成像子系统2的配合解决压接图像采集人工作业风险高、劳动强度大的问题,同时以智能评价子系统代替人工缺陷识别,解决人工缺陷评判效率低、准确性差的问题。
51.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内作出各种变形或修改,这并不影
响本发明的实质内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1