一种基于动力学建模的盾构掘进位姿预测方法
1.本发明属于盾构施工领域,具体涉及一种基于动力学建模的盾构掘进位姿预测方法。
背景技术:
2.盾构法凭借其施工速度快、安全性高和环境污染小等优势已逐渐成为隧道施工的主流工法。盾构掘进过程中,由于围岩的差异约束、操作参数设置不合理等因素,盾构掘进位姿(位置和姿态)难以精准控制,使得盾构掘进轨迹不可避免地偏离隧道设计轴线。盾构位姿控制不当极易引起盾尾挤压管片,导致管片错台、破损和渗漏等问题,同时,盾构掘进轨迹偏离隧道设计轴线会大大降低成型隧道轴线质量,为隧道未来运营埋下安全隐患。因此盾构位姿精准控制对保障盾构安全、高效施工具有重要意义。
3.目前盾构位姿控制大多是反馈控制。盾构司机或是自动控制系统根据盾构导向系统测量得到的盾构位姿偏差,凭借人工经验或是某种控制策略来调整盾构推进系统参数,实现盾构位姿的调整。但由于盾构机自身质量带来的大惯性和液压系统控制的时滞性,使得基于反馈控制的位姿控制方法存在很大的滞后,极易造成盾构的蛇形运动。盾构掘进过程中如果能在盾构将偏未偏之时提起预测盾构位姿偏差并进行控制,则可以有效消除控制的滞后性,提升盾构位姿的控制精度。
4.随着人工智能和大数据技术的发展,目前盾构位姿预测主要是利用盾构掘进过程中产生的大量历史数据采用数据驱动建模的手段来建立位姿预测模型。但现有的基于数据驱动建模的盾构姿态预测模型本质上都属于黑箱模型,可解释性较差;数据驱动模型的精度和泛化能力之间的天然矛盾使得模型在一个工程中具有较高的预测精度,在另一个工程中不一定适用;在新工程中重新训练模型需要额外的时间,这大大限制了模型的实际工程应用。
技术实现要素:
5.本发明旨在提供一种基于动力学建模的盾构掘进位姿预测方法,用于解决以上问题。
6.本发明的技术方案是:
7.一种基于动力学建模的盾构掘进位姿预测方法,包括以下步骤:
8.s1:根据盾构导向系统获取历史盾构位姿信息和位姿变化率;
9.s2:确定盾构位姿变换矩阵;
10.s3:确定盾构推进系统参数;
11.s4:建立盾构推进系统动力学方程;
12.s5:建立盾构推进系统状态空间模型;
13.s6:建立盾构等效负载估计模型;
14.s7:建立盾构掘进位姿预测模型。
15.优选地,s1中,
16.盾构位姿矢量q=[x y z ψ θ φ]
t
和位姿变化率矢量
[0017]
其中(x,y,z)表示盾构机推进油缸前球铰分布圆中心的位置坐标;(ψ,θ,φ)表示盾构机的三个姿态角:滚动角,俯仰角和横摆角。
[0018]
优选地,s2中,
[0019]
盾构位姿变换矩阵计算公式为:
[0020][0021]
其中,和分别表示盾构的姿态矩阵和位置矢量,其计算公式为
[0022][0023][0024]
其中,c代表余弦函数cos;s代表正弦函数sin。
[0025]
优选地,s3中,
[0026]
盾构推进系统参数包括:推进油缸后球铰坐标bi;盾体质心位置矢量rg;盾构质量mg;盾体惯性张量aim;盾构推进系统推进力矢量fd=[f
1 f2…fn
]
t
,n为推进油缸总数量。
[0027]
优选地,s4中,
[0028]
盾构推进系统动力学方程为:
[0029][0030]
其中,f
t
为盾构掘进过程中受到的等效负载;其它系数计算公式为:
[0031][0032]
其中,e3为三阶单位矩阵;aui为第i根推进油缸单位方向向量,i=1,2,3,
……
n;g=[0 0
ꢀ‑
9.8]
t
为重力加速度矢量;ω为盾体角速度;aui,t0,和ω计算公式为:
[0033][0034][0035][0036][0037]
优选地,s5中,
[0038]
盾构推进系统状态空间模型为
[0039][0040]
y=x1=hx
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0041]
其中,x1=q=[x y z ψ θ φ]
t
表示系统的位姿,表示系统的位姿变化率;表示系统的状态矢量;u=fd=[f
1 f2…fn
]
t
表示系统的控制输入;h=[e
6 06×6]表示系统的输出矩阵;y=[x y z ψ θ φ]
t
表示系统的输出位姿矢量;h1(x)和h2(x)计算公式为:
[0042]
h1(x)=m-1
(f
t-cx
2-g)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0043]
h2(x)=m-1jt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)。
[0045]
优选地,s6中建立盾构等效负载估计模型具体包括:
[0046]
对公式(4)进行移项并进行后向差分,盾构等效负载估计公式为:
[0047][0048]
其中,f
t
(k)表示k时刻的盾构等效负载;u(k)表示k时刻的盾构推进系统控制输入;m(k),c(k),g(k)和j(k)分别表示公式(5)中m,c,g和j参数在k时刻的取值;x(k)表示k时刻系统的状态矢量;x(k-1)表示k-1时刻系统的状态矢量;ts为系统采样间隔时间;d1=[06×
6 e6],d2=[e
6 06×6]。
[0049]
优选地,s7中建立盾构掘进位姿预测模型,具体包括:
[0050]
(1)一步预测
[0051]
k时刻的盾构等效负载估计为
[0052][0053]
k时刻预测未来k+1时刻系统状态矢量为
[0054]
x
p
(k+1|k)=x(k)+tsf(x(k),u(k),f
t
(k))
ꢀꢀꢀꢀꢀꢀ
(16)
[0055]
(2)两步预测
[0056]
k+1时刻的盾构等效负载估计为
[0057][0058]
k时刻预测未来k+2时刻系统状态矢量为
[0059]
x
p
(k+2|k)=x
p
(k+1|k)+tsf(x
p
(k+1|k),u(k+1),f
t
(k+1))
ꢀꢀꢀ
(18)
[0060]
(3)n
p
步预测
[0061]
k+n
p-1时刻的盾构等效负载估计为
[0062][0063]
k时刻预测未来k+n
p
时刻系统状态矢量为
[0064][0065]
根据公式(10),在k时刻对未来n
p
盾构掘进位姿状态预测公式为
[0066]
本发明的有益效果在于:
[0067]
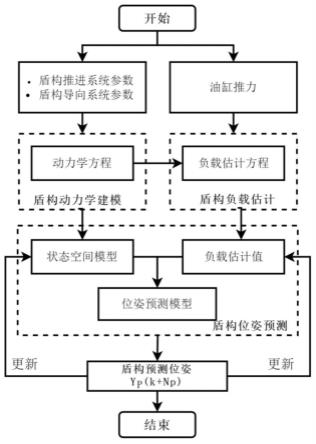
本发明提供一种基于动力学建模的盾构掘进位姿预测方法,包括动力学建模、盾构负载估计模型和盾构位姿预测模型三部分,具有较高的预测精度和工程适用性,能够为盾构司机或是自动控制系统调整盾构位姿提供理论依据。
附图说明
[0068]
图1为本发明实施例提供的一种基于动力学建模的盾构掘进位姿预测方法的流程图;
[0069]
图2为本发明实施例提供的一种基于动力学建模的盾构掘进位姿预测方法的盾构推进系统液压油缸分区布置图;
[0070]
图3为本发明实施例提供的一种基于动力学建模的盾构掘进位姿预测方法的盾构掘进位姿多步预测结果示意图。
具体实施方式
[0071]
下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好的理解本发明并能予以实施,本发明的实施方式不限于此。
[0072]
实施例1
[0073]
如图1所示,一种基于动力学建模的盾构掘进位姿预测方法,包括以下步骤:
[0074]
s1:根据盾构导向系统获取历史盾构位姿信息和位姿变化率;
[0075]
s2:确定盾构位姿变换矩阵;
[0076]
s3:确定盾构推进系统参数;
[0077]
s4:建立盾构推进系统动力学方程;
[0078]
s5:建立盾构推进系统状态空间模型;
[0079]
s6:建立盾构等效负载估计模型;
[0080]
s7:建立盾构掘进位姿预测模型。
[0081]
其中,步骤一中的盾构导向系统获取历史盾构位姿信息和位姿变化率,包括盾构位姿矢量q=[x y z ψ θ φ]
t
和位姿变化率矢量上述参数可以通过盾构机导向系统采集获取;
[0082]
步骤二中盾构位姿变换矩阵可由下式确定:
[0083][0084]
其中,和分别表示盾构的姿态矩阵和位置矢量,其计算公式为
[0085][0086][0087]
其中,c代表余弦函数cos;s代表正弦函数sin。
[0088]
步骤三中的盾构推进系统参数可根据工程资料确定:推进油缸后球铰坐标bi可由推进系统油缸布置方案确定,如图2所示;盾体质心位置矢量rg=[1.2m 0m
ꢀ‑
3m];盾构质量mg=3
×
106kg;盾体惯性张量aim=diag(27000000,31298700,4320000)kgm2;盾构推进系统推进力适量fd=[f
1 f2…fn
]
t
可由盾构推进系统读取;推进油缸总数量n=56;采样间隔时间ts=30s。
[0089]
步骤四中的盾构推进系统动力学方程可由kane方法建立,如下式所示
[0090][0091]
其中,f
t
为盾构掘进过程中受到的等效负载;其它系数计算公式为:
[0092][0093]
其中,e3为三阶单位矩阵;aui为第i根推进油缸单位方向向量,i=1,2,3,
……
n;aui,t0和计算公式为:
[0094][0095][0096][0097]
步骤五中的盾构推进系统状态空间模型可表示如下
[0098][0099]
y=x1=cx
ꢀꢀꢀꢀꢀꢀꢀꢀ
(31)
[0100]
其中,x1=q=[x y z ψ θ φ]
t
表示系统的位姿,表示系统的位姿变化率;表示系统的状态矢量;u=fd=[f
1 f2…fn
]
t
表示系统的控制输入;c=[e
6 06×6]表示系统的输出矩阵;y=[x y z ψ θ φ]
t
表示系统的输出位姿矢量。h1(x)和h2(x)计算公式为:
[0101]
h1(x)=m-1
(f
t-cx
2-g)
ꢀꢀꢀꢀꢀꢀꢀ
(32)
[0102]
h2(x)=m-1jt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(33)
[0103]
步骤六中的盾构等效负载可按下式估计
[0104][0105]
其中,f
t
(k)表示k时刻的盾构等效负载;u(k)表示k时刻的盾构推进系统控制输入;m(k),c(k),g(k)和j(k)分别表示公式(5)中m,c,g和j参数在k时刻的取值;x(k)表示k时刻系统的状态矢量;x(k-1)表示k-1时刻系统的状态矢量;ts为系统采样间隔时间;d1=[06×
6 e6],d2=[e
6 06×6]
[0106]
步骤七中的盾构位姿可按下式进行预测
[0107]
(1)一步预测
[0108]
k时刻的盾构等效负载估计为
[0109][0110]
k时刻预测未来k+1时刻系统状态矢量为
[0111]
x
p
(k+1|k)=x(k)+tsf(x(k),u(k),f
t
(k))
ꢀꢀꢀ
(36)
[0112]
(2)两步预测
[0113]
k+1时刻的盾构等效负载估计为
[0114][0115]
k时刻预测未来k+2时刻系统状态矢量为
[0116]
x
p
(k+2|k)=x
p
(k+1|k)+tsf(x
p
(k+1|k),u(k+1),f
t
(k+1))
ꢀꢀꢀꢀꢀꢀꢀꢀ
(38)
[0117]
(3)n
p
步预测
[0118]
k+n
p-1时刻的盾构等效负载估计为
[0119][0120]
k时刻预测未来k+n
p
时刻系统状态矢量为
[0121][0122]
根据公式(10),在k时刻对未来n
p
盾构掘进位姿状态预测公式为
[0123][0124]
以上可实现在k时刻对未来n
p
的盾构掘进位姿预测,其他时刻的盾构掘进位姿多步预测可按照相同方法确定。通过以上流程,图3给出了n
p
=5时的盾构掘进位姿多步预测
结果示意图。由图3可知,k+1步~k+5步的位姿预测值和位姿真实值随时间变化曲线基本重合,表明本发明提出的盾构掘进位姿预测方法具有较高的预测精度。通过相对误差曲线可知,k+1步的位姿预测精度最高,随着预测步的增加,位姿预测相对误差逐渐增大,k+5步时位姿预测相对误差最大。位姿预测相对误差数量级都在10-4
以下。可见采用本发明中的盾构掘进位姿预测方法可以较高精度地预测盾构未来的多步位姿,能够为盾构司机或是自动控制系统调整盾构位姿提供理论依据。
[0125]
本领域普通技术人员可以理解:附图只是一个实施例的示意图,附图中的流程并不一定是实施本发明所必须的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1