一种旋转采集弯曲数据平直化处理方法与流程
1.本发明涉及图像处理技术领域,尤其涉及一种旋转采集弯曲数据平直化处理方法。
背景技术:
2.对于线扫数据采集设备,由于数据采集为单线采集,所以需要被测物运动或者采集设备运动;对于大型圆形被测物,为保证精度,需使被测物或者采集设备旋转运动,以获取被测物完整数据。但是必须要求被测物、被测物运动载体与采集设备做高精度同心圆周运动,因此对硬件设备加工、装配、运动、对中要求极高,对大尺寸工件很难做到如上要求,因此采集到数据由理论上同起点变为起点如波浪型凹凸,且随圆周运动具有一定周期性,直接影响采集数据质量,进而影响数据处理。
技术实现要素:
3.本发明提出的一种旋转采集弯曲数据平直化处理方法,将数据采集设备在与被测物、被测物运动载体在不完全做同心圆周运动的情况下所采集的数据,进行平直化处理,从而获取理想数据,为后续数据处理奠定基础。
4.为了实现上述目的,本发明采用了如下技术方案:
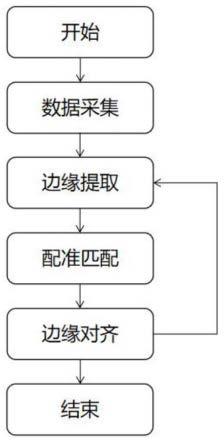
5.一种旋转采集弯曲数据平直化处理方法,基于线扫数据采集设备采集被测物,包括如下步骤:
6.s1、数据采集设备与被测物采用机械装置做相对圆周运动,即机械装置携带被测量物做旋转运动,测试设备固定位置进行扫描测量,完成数据采集;
7.s2、边缘提取:由于数据采集设备的视野大于被测物,且被测物处数据为真实值,背景区域为无效值,因此被测物边缘可以在视野中获取;
8.s3、配准匹配:对每一行数据做上述步骤s2边缘提取处理后,以上下两行起始位为初始位,计算上下两行对位差,并求均方差,当均方差小于某阈值时,认为对齐;否则进行错位对齐;
9.s4、边缘对齐,对于经过上述s2、s3的数据,按照起始位坐标,统一将有效数据平移到指定坐标;
10.s5、重复以上步骤,直到所有数据行处理完成,最终获取平直边缘数据。
11.优选地,边缘提取具体步骤如下:
12.s21、遍历采集数据,过滤无效数据、奇异数据;
13.s22、获取无效数据与真实数据变化处位置坐标,记为边缘坐标。
14.优选地,s1中所述数据采集设备不局限于轮廓仪,激光雷达,线扫相机,包括所有线扫数据采集设备。
15.优选地,s2中边缘提取方式不局限与有效数据无效数据区分,还包括阈值处理,sobel,canny边缘提取算法。
16.优选地,s3中配准匹配方式不局限与对位均方差,错位均方差,特征匹配配准方式。
17.优选地,应用场景不局限与线扫数据采集旋转被测物,对所有需要数据位置矫正场景均适用。
18.优选地,所述线扫数据采集设备包括数据采集设备和被测物,所述数据采集设备设置在支架上,所述支架上设有横梁和纵梁,所述横梁滑动安装在支架上并可沿支架水平方向移动,所述纵梁设置在横梁上,且可沿横梁长度方向移动,完成数据采集设备水平面的移动,所述数据采集设备滑动安装在纵梁上,并可沿纵梁上下移动,完成数据采集设备三维立体方向的移动进行扫描测量,完成数据采集;所述被测物设置在底座上,所述底座上设有内部转盘和外部转盘,所述外部转盘位于内部转盘上方,所述被测物设置在外部转盘内,所述内部转盘上均布有四根垂直设置的连杆,所述内部转盘由驱动结构驱动带到四根连杆同步向内或向外扩展,达到外部被测物同心;当达到预设的扭矩时,停止内部转盘,然后外部转盘携带被测物做匀速圆周运动,采用数据采集设备对被测物进行扫描。
19.与现有技术相比,本发明提出的一种旋转采集弯曲数据平直化处理方法,极大的降低了对机械的设计、加工、装配要求,进而降低硬件成本;软件上使数据平直化对齐,使后续数据分析、处理更加准确、稳定。本发明将数据采集设备在与被测物、被测物运动载体在不完全做同心圆周运动的情况下所采集的数据,进行平直化处理,从而获取理想数据,为后续数据处理奠定基础。
附图说明
20.图1为本发明的处理流程图。
21.图2为本发明的提供一种基于线扫数据采集设备采集被测物的装置的结构示意图。
22.图3为图2中被测物底座结构示意图。
23.图中:1、数据采集设备,2、支架,3、横梁,4、纵梁,5、底座,6、内部转盘,7、外部转盘,8、连杆。
具体实施方式
24.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
25.参照图1,本发明提出的一种旋转采集弯曲数据平直化处理方法,基于线扫数据采集设备采集被测物,包括如下步骤:
26.s1、数据采集设备与被测物采用机械装置做相对圆周运动,即机械装置携带被测量物做旋转运动,测试设备固定位置进行扫描测量,完成数据采集;
27.s2、边缘提取:由于数据采集设备的视野大于被测物,且被测物处数据为真实值,背景区域为无效值,因此被测物边缘可以在视野中获取;
28.边缘提取具体步骤如下:
29.s21、遍历采集数据,过滤无效数据、奇异数据;
30.s22、获取无效数据与真实数据变化处位置坐标,记为边缘坐标;
31.s3、配准匹配:对每一行数据做上述步骤s2边缘提取处理后,以上下两行起始位为初始位,计算上下两行对位差,并求均方差,当均方差小于某阈值时,认为对齐;否则进行错位对齐;
32.s4、边缘对齐,对于经过上述s2、s3的数据,按照起始位坐标,统一将有效数据平移到指定坐标;
33.s5、重复以上步骤,直到所有数据行处理完成,最终获取平直边缘数据。
34.本发明s1中所述数据采集设备不局限于轮廓仪,激光雷达,线扫相机,包括所有线扫数据采集设备。s2中边缘提取方式不局限与有效数据无效数据区分,还包括阈值处理,sobel,canny边缘提取算法。s3中配准匹配方式不局限与对位均方差,错位均方差,特征匹配配准方式。
35.本发明应用场景不局限与线扫数据采集旋转被测物,对所有需要数据位置矫正场景均适用。
36.如图2-3所示,本发明提出一种基于线扫数据采集设备采集被测物的装置,所述线扫数据采集设备包括数据采集设备1和被测物,所述数据采集设备1设置在支架2上,所述支架2上设有横梁3和纵梁4,所述横梁3滑动安装在支架2上并可沿支架2水平方向移动,所述纵梁4设置在横梁3上,且可沿横梁3长度方向移动,完成数据采集设备1水平面的移动,所述数据采集设备1滑动安装在纵梁4上,并可沿纵梁4上下移动,完成数据采集设备1三维立体方向的移动进行扫描测量,完成数据采集;所述被测物设置在底座5上,所述底座5上设有内部转盘6和外部转盘7,所述外部转盘7位于内部转盘6上方,所述被测物设置在外部转盘7内,所述内部转盘6上均布有四根垂直设置的连杆8,所述内部转盘6由驱动结构驱动带到四根连杆8同步向内或向外扩展,达到外部被测物同心;当达到预设的扭矩时,停止内部转盘6,然后外部转盘8携带被测物做匀速圆周运动,采用数据采集设备1对被测物进行扫描。
37.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1