基于优化算法的改进交通标志检测模型
1.本发明属于交通标志检测技术领域,具体涉及基于优化算法的改进交通标志检测模型。
背景技术:
2.近些年来,随着国内经济的快速发展和基础建设的逐步完善,越来越多的家庭拥有私家车,人们的出行方式越来越多样化,辅助驾驶系统就此应运而生。在辅助驾驶系统中,对于交通标志的检测尤为重要。国内对于交通标志的检测方法主要有两种:基于人系列为主,有mask r-cnn、faster r-cnn和cascade r-cnn[1-4]等。one-stage检测算法在分类之前不需要获取候选区域,主要以yolo系列为主。该系列目标检测算法具有高时效性、高准确性和轻量性。基于人工提取特征的交通标志检测方法的优点是检测速度快且简单方便,缺点是因由于周围环境复杂,该方法的检测精度难以满足实际驾驶情况的要求。
[0003]
传统的交通标志检测算法利用混合优化算法gho来改进yolox-s网络的模型。yolox-s网络对于交通标志的检测有较高的精度,但对于初始权值、阈值过于依赖,gho是混合了hho算法和gwo算法的一种仿生优化算法。hho算法虽然具有参数较少、搜索效率和收敛精度高、适用于解决高维度多极值问题等优点,但是其在低维问题上的搜索精度较差,且过于依赖现有个体,可能会导致算法陷入局部最优解、过早收敛等情况。
技术实现要素:
[0004]
本发明要解决的技术问题是克服现有的缺陷,提供基于优化算法的改进交通标志检测模型,以解决上述背景技术中提出的问题。
[0005]
为实现上述目的,本发明提供如下技术方案:基于优化算法的改进交通标志检测模型,包括以下步骤:
[0006]
步骤一:建立gho-yolox算法模型,算法模型中包含哈里斯鹰优化算法、搜索阶段以及围捕阶段;
[0007]
步骤二:模型仿生优化,仿生优化包含灰狼优化算法、包围猎物、狩猎以及开发与勘探;
[0008]
步骤三:yolox网络,通过yolo目标检测算法对现场交通标志和路障检测;
[0009]
步骤四:gho-yolox算法,混合hho算法和gwo算法进行改进;
[0010]
步骤五:模型检测实验,实验内容包含数据集、实验环境、实验有效性以及实验结果分析;
[0011]
步骤六:实验结果分析,结果分析包含不同环境下的检测结果对比、不同算法对比。
[0012]
优选的,所述步骤一中,基于野兔逃逸能量e的变化,哈里斯鹰的狩猎行为将发生转化,野兔逃逸能量e的公式如下式(1):
[0013][0014]
公式(1)中,e0∈[-1,1],t为当前的迭代次数。
[0015]
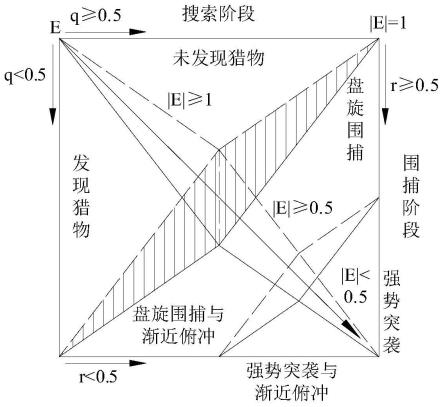
优选的,所述步骤一中,当野兔逃逸能量|e|>1时,哈里斯鹰群处于搜索阶段,针对发现野兔和未发现两种情况,生成一个随机数q,当q≥0.5时,哈里斯鹰还未发现野兔的位置。两种情况的搜索方式如下式(2)
[0016][0017]
公式(2)中,在下次迭代过程中,哈斯鹰当前的位置,x
prey
(t)表示野兔的位置,哈里斯鹰群中随机个体的位置表示为x
ran
d(t),该维度变量的上下限分别为ub和lb,ri和q为(0,1)内的随机数,i=1,2,3,4。xm(t)表示哈里斯鹰当前位置的平均数,其实公式如下式(3):
[0018][0019]
公式(3)中,哈里斯鹰群个体总数为n,在迭代第t次中每只哈里斯鹰的位置表示为xi(t)。
[0020]
优选的,所述步骤二中,当野兔逃逸能量|e|≥0.5,且r≥0.5时,此时哈里斯鹰群处于盘旋围捕状态,盘旋围捕的公式如下式(4):
[0021]
x(t+1)=x
prey
(t)-x(t)
[0022]-e|jx
prey
(t)-x(t)|
ꢀꢀꢀ
(3)
[0023]
公式(4)中,当前野兔的逃逸能量为e,j为野兔的随机跳跃强度,其公式为下式(5):
[0024]
j=2(1-r5)
ꢀꢀꢀ
(4)
[0025]
公式(5)中,r5为(0,1)内的随机数。
[0026]
优选的,所述步骤二中,当野兔逃逸能量|e|<0.5,且r≥0.5时,此时哈里斯鹰群处于强势突袭状态,强势突袭的公式如下式(6):
[0027]
x(t+1)=x
prey
(t)-e|x
prey
(t)-x(t)|
ꢀꢀꢀ
(5)。
[0028]
优选的,所述步骤二中,当野兔逃逸能量|e|≥0.5,且r<0.5时,此时哈里斯鹰群处于盘旋围捕与渐进俯冲状态,哈里斯鹰群将根据公式(7)来评估下一步行动。
[0029]
y=x
prey
(t)-e|jx
prey
(t)-x(t)|
ꢀꢀꢀ
(6)
[0030]
将公式(7)中得到的y与当前位置的适应度的值相比较,来判断这次突袭是否成功。如果失败,哈里斯鹰群将会按照公式(8)开始快速俯冲攻击:
[0031]
z=y+s
×
lf(dim)
ꢀꢀꢀ
(7)
[0032]
公式(8)中,s为维度1
×
dim的随机向量,lf表示l
é
vy飞行的函数,其公式为下式(9):
[0033]
[0034][0035]
公式(9)中,u和|v|为(0,1)内的随机数,β为1.5的默认常量。盘旋围捕与渐进俯冲状态下哈里斯鹰位置更新公式(11):
[0036][0037]
强势突袭与渐进俯冲:当野兔逃逸能量|e|<0.5,且r<0.5时,此时哈里斯鹰群处于强势突袭与渐进俯冲状态,哈里斯鹰位置更新公式(12):
[0038][0039]
y=x
prey
(t)-e|jx
prey
(t)-xm(t)|
ꢀꢀꢀ
(12)。
[0040]
优选的,所述步骤三中,yolox模型相较于前几代版本最大的改进在于加入解耦头(decoupled head),使用多个锚框来预测目标的类别与位置,同时yolox模型也加入了许多新的技巧,如将yolo检测器和无锚框检测器结合、加入标签分配策略等。yolox-s模型结构主要分为四个部分:输入端、主干网络、颈部和预测端。
[0041]
优选的,所述步骤四中,gwo算法中存在信息反馈机制,及能够自适应调整的收敛因子,能够实现全局搜索与局部寻优间的平衡,可以改善hho算法的搜索能力,卷积公式(21):
[0042]
t={t1,t2,...th,...t
l
,}
ꢀꢀꢀ
(13)
[0043]
公式(21)中,l表示卷积层总数,第h层卷积层记为th。
[0044]
优选的,所述步骤五中,本实验针对包括雷雨天气、大雾、角度、不同光照条件、不同破损程度和遮挡等条件下的警告标志、禁令标志和指示标志的识别。
[0045]
优选的,所述步骤六中,从训练完成的样本中选取4张具有代表性的图像,这4张图像中目标分别处在目标清晰、目标被遮挡、目标距离远且尺寸小和弱光等环境下,引入hho、gwo、鲸鱼算法(woa)、正余弦算法(sca)与yolox-s结合,分别与yolox-s和gho-yolox算法在相同的环境下进行对比,数据集为中国交通数据集。
[0046]
与现有技术相比,本发明提供了基于优化算法的改进交通标志检测模型,具备以下有益效果:
[0047]
本发明通过在hho算法的基础上引入gwo算法,gwo算法中存在信息反馈机制,及能够自适应调整的收敛因子,能够实现全局搜索与局部寻优间的平衡,可以改善hho算法的搜索能力。利用改进仿生优化算法gho,降低yolox-s网络模型参数设置的复杂度,给出最优解,提高模型的准确率,该算法利用改进优化算法gho来降低yolox-s网络模型参数设置的复杂度,提高模型的准确率给出最优解。gho混合了哈里斯鹰优化算法(hho)和灰狼优化算法(gwo)。实验表明改进后的yolox-s网络模型性能得到了明显提升,改善了网络训练对初
始权值、阈值的依赖,降低训练误差,与其他算法相比,在准确率、召回率(recall)、f值上均有明显的提升;
附图说明
[0048]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制,在附图中:
[0049]
图1为本发明提出的基于优化算法的改进交通标志检测模型的哈里斯鹰优化算法各个阶段图;
[0050]
图2为本发明提出的基于优化算法的改进交通标志检测模型的灰狼种群等级层次图;
[0051]
图3为本发明提出的基于优化算法的改进交通标志检测模型的yolox网络结构;
[0052]
图4为本发明提出的基于优化算法的改进交通标志检测模型的gho优化算法流程图;
[0053]
图5为本发明提出的基于优化算法的改进交通标志检测模型的部分数据集图;
[0054]
图6为本发明提出的基于优化算法的改进交通标志检测模型的原图;
[0055]
图7为本发明提出的基于优化算法的改进交通标志检测模型的gho-yolox算法检测结果图;
[0056]
图8为本发明提出的基于优化算法的改进交通标志检测模型的gho-yolox算法检测平均精度图;
具体实施方式
[0057]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0058]
请参阅图1-8,本发明提供以下技术方案:基于优化算法的改进交通标志检测模型,包括以下步骤:
[0059]
步骤一:建立gho-yolox算法模型,算法模型中包含哈里斯鹰优化算法、搜索阶段以及围捕阶段;
[0060]
步骤二:模型仿生优化,仿生优化包含灰狼优化算法、包围猎物、狩猎以及开发与勘探;
[0061]
步骤三:yolox网络,通过yolo目标检测算法对现场交通标志和路障检测;
[0062]
步骤四:gho-yolox算法,混合hho算法和gwo算法进行改进;
[0063]
步骤五:模型检测实验,实验内容包含数据集、实验环境、实验有效性以及实验结果分析;
[0064]
步骤六:实验结果分析,结果分析包含不同环境下的检测结果对比、不同算法对比。
[0065]
本发明中,优选的,步骤一中,基于野兔逃逸能量e的变化,哈里斯鹰的狩猎行为将发生转化,野兔逃逸能量e的公式如下式(1):
[0066][0067]
公式(1)中,e0∈[-1,1],t为当前的迭代次数。
[0068]
本发明中,优选的,步骤一中,当野兔逃逸能量|e|>1时,哈里斯鹰群处于搜索阶段,针对发现野兔和未发现两种情况,生成一个随机数q,当q≥0.5时,哈里斯鹰还未发现野兔的位置。两种情况的搜索方式如下式(2)
[0069][0070]
公式(2)中,在下次迭代过程中,哈斯鹰当前的位置,x
prey
(t)表示野兔的位置,哈里斯鹰群中随机个体的位置表示为x
rand
(t),该维度变量的上下限分别为ub和lb,ri和q为(0,1)内的随机数,i=1,2,3,4。xm(t)表示哈里斯鹰当前位置的平均数,其实公式如下式(3):
[0071][0072]
公式(3)中,哈里斯鹰群个体总数为n,在迭代第t次中每只哈里斯鹰的位置表示为xi(t)。
[0073]
本发明中,优选的,步骤二中,当野兔逃逸能量|e|≥0.5,且r≥0.5时,此时哈里斯鹰群处于盘旋围捕状态,盘旋围捕的公式如下式(4):
[0074]
x(t+1)=x
prey
(t)-x(t)
[0075]-e|jx
prey
(t)-x(t)|
ꢀꢀꢀꢀ
(16)
[0076]
公式(4)中,当前野兔的逃逸能量为e,j为野兔的随机跳跃强度,其公式为下式(5):
[0077]
j=2(1-r5)
ꢀꢀꢀ
(17)
[0078]
公式(5)中,r5为(0,1)内的随机数。
[0079]
本发明中,优选的,步骤二中,当野兔逃逸能量|e|<0.5,且r≥0.5时,此时哈里斯鹰群处于强势突袭状态,强势突袭的公式如下式(6):
[0080]
x(t+1)=x
prey
(t)-e|x
prey
(t)-x(t)|
ꢀꢀꢀ
(18)。
[0081]
本发明中,优选的,步骤二中,当野兔逃逸能量|e|≥0.5,且r<0.5时,此时哈里斯鹰群处于盘旋围捕与渐进俯冲状态,哈里斯鹰群将根据公式(7)来评估下一步行动。
[0082]
y=x
prey
(t)-e|jx
prey
(t)-x(t)|
ꢀꢀꢀ
(19)
[0083]
将公式(7)中得到的y与当前位置的适应度的值相比较,来判断这次突袭是否成功。如果失败,哈里斯鹰群将会按照公式(8)开始快速俯冲攻击:
[0084]
z=y+s
×
lf(dim)
ꢀꢀꢀ
(20)
[0085]
公式(8)中,s为维度1
×
dim的随机向量,lf表示l
é
vy飞行的函数,其公式为下式(9):
[0086]
[0087][0088]
公式(9)中,u和|v|为(0,1)内的随机数,β为1.5的默认常量。盘旋围捕与渐进俯冲状态下哈里斯鹰位置更新公式(11):
[0089][0090]
强势突袭与渐进俯冲:当野兔逃逸能量|e|<0.5,且r<0.5时,此时哈里斯鹰群处于强势突袭与渐进俯冲状态,哈里斯鹰位置更新公式(12):
[0091][0092]
y=x
prey
(t)-e|jx
prey
(t)-xm(t)|
ꢀꢀꢀ
(25)。
[0093]
本发明中,优选的,步骤三中,yolox模型相较于前几代版本最大的改进在于加入解耦头(decoupled head),使用多个锚框来预测目标的类别与位置,同时yolox模型也加入了许多新的技巧,如将yolo检测器和无锚框检测器结合、加入标签分配策略等。yolox-s模型结构主要分为四个部分:输入端、主干网络、颈部和预测端。
[0094]
本发明中,优选的,步骤四中,gwo算法中存在信息反馈机制,及能够自适应调整的收敛因子,能够实现全局搜索与局部寻优间的平衡,可以改善hho算法的搜索能力,卷积公式(21):
[0095]
t={t1,t2,...th,...t
l
,}
ꢀꢀꢀ
(26)
[0096]
公式(21)中,l表示卷积层总数,第h层卷积层记为th。
[0097]
本发明中,优选的,步骤五中,本实验针对包括雷雨天气、大雾、角度、不同光照条件、不同破损程度和遮挡等条件下的警告标志、禁令标志和指示标志的识别。
[0098]
本发明中,优选的,步骤六中,从训练完成的样本中选取4张具有代表性的图像,这4张图像中目标分别处在目标清晰、目标被遮挡、目标距离远且尺寸小和弱光等环境下,引入hho、gwo、鲸鱼算法(woa)、正余弦算法(sca)与yolox-s结合,分别与yolox-s和gho-yolox算法在相同的环境下进行对比,数据集为中国交通数据集。
[0099]
本发明通过在hho算法的基础上引入gwo算法,gwo算法中存在信息反馈机制,及能够自适应调整的收敛因子,能够实现全局搜索与局部寻优间的平衡,可以改善hho算法的搜索能力。利用改进仿生优化算法gho,降低yolox-s网络模型参数设置的复杂度,给出最优解,提高模型的准确率,该算法利用改进优化算法gho来降低yolox-s网络模型参数设置的复杂度,提高模型的准确率给出最优解,本发明提出的gho-yolox算法能够准确地识别出复杂环境下的交通标志,在相同平台上,使用中国交通数据集上进行测试,gho-yolox算法相比于其他5种算法,在map、recall和f1上有较明显的提升,有利于满足实际驾驶的需要,有助于推动辅助驾驶系统的完善和发展。
[0100]
实施例一:
[0101]
请参阅图1-8,本发明提供以下技术方案:基于优化算法的改进交通标志检测模型,包括以下步骤:
[0102]
步骤一:建立gho-yolox算法模型,算法模型中包含哈里斯鹰优化算法、搜索阶段以及围捕阶段;
[0103]
步骤二:模型仿生优化,仿生优化包含灰狼优化算法、包围猎物、狩猎以及开发与勘探;
[0104]
步骤三:yolox网络,通过yolo目标检测算法对现场交通标志和路障检测;
[0105]
步骤四:gho-yolox算法,混合hho算法和gwo算法进行改进;
[0106]
步骤五:模型检测实验,实验内容包含数据集、实验环境、实验有效性以及实验结果分析;
[0107]
步骤六:实验结果分析,结果分析包含不同环境下的检测结果对比、不同算法对比。
[0108]
本发明中,优选的,步骤一中,基于野兔逃逸能量e的变化,哈里斯鹰的狩猎行为将发生转化,野兔逃逸能量e的公式如下式(1):
[0109][0110]
公式(1)中,e0∈[-1,1],t为当前的迭代次数。
[0111]
本发明中,优选的,步骤一中,当野兔逃逸能量|e|>1时,哈里斯鹰群处于搜索阶段,针对发现野兔和未发现两种情况,生成一个随机数q,当q≥0.5时,哈里斯鹰还未发现野兔的位置。两种情况的搜索方式如下式(2)
[0112][0113]
公式(2)中,在下次迭代过程中,哈斯鹰当前的位置,x
prey
(t)表示野兔的位置,哈里斯鹰群中随机个体的位置表示为x
rand
(t),该维度变量的上下限分别为ub和lb,ri和q为(0,1)内的随机数,i=1,2,3,4。xm(t)表示哈里斯鹰当前位置的平均数,其实公式如下式(3):
[0114][0115]
公式(3)中,哈里斯鹰群个体总数为n,在迭代第t次中每只哈里斯鹰的位置表示为xi(t)。
[0116]
本发明中,优选的,步骤二中,当野兔逃逸能量|e|≥0.5,且r≥0.5时,此时哈里斯鹰群处于盘旋围捕状态,盘旋围捕的公式如下式(4):
[0117]
x(t+1)=x
prey
(t)-x(t)
[0118]-e|jx
prey
(t)-x(t)|
ꢀꢀꢀ
(29)
[0119]
公式(4)中,当前野兔的逃逸能量为e,j为野兔的随机跳跃强度,其公式为下式(5):
[0120]
j=2(1-r5)
ꢀꢀꢀ
(30)
[0121]
公式(5)中,r5为(0,1)内的随机数。
[0122]
本发明中,优选的,步骤二中,当野兔逃逸能量|e|<0.5,且r≥0.5时,此时哈里斯鹰群处于强势突袭状态,强势突袭的公式如下式(6):
[0123]
x(t+1)=x
prey
(t)-e|x
prey
(t)-x(t)|
ꢀꢀꢀ
(31)。
[0124]
本发明中,优选的,步骤二中,当野兔逃逸能量|e|≥0.5,且r<0.5时,此时哈里斯鹰群处于盘旋围捕与渐进俯冲状态,哈里斯鹰群将根据公式(7)来评估下一步行动。
[0125]
y=x
prey
(t)-e|jx
prey
(t)-x(t)|
ꢀꢀꢀ
(32)
[0126]
将公式(7)中得到的y与当前位置的适应度的值相比较,来判断这次突袭是否成功。如果失败,哈里斯鹰群将会按照公式(8)开始快速俯冲攻击:
[0127]
z=y+s
×
lf(dim)
ꢀꢀꢀ
(33)
[0128]
公式(8)中,s为维度1
×
dim的随机向量,lf表示l
é
vy飞行的函数,其公式为下式(9):
[0129][0130][0131]
公式(9)中,u和|v|为(0,1)内的随机数,β为1.5的默认常量。盘旋围捕与渐进俯冲状态下哈里斯鹰位置更新公式(11):
[0132][0133]
强势突袭与渐进俯冲:当野兔逃逸能量|e|<0.5,且r<0.5时,此时哈里斯鹰群处于强势突袭与渐进俯冲状态,哈里斯鹰位置更新公式(12):
[0134][0135]
y=x
prey
(t)-e|jx
prey
(t)-xm(t)|
ꢀꢀꢀ
(38)。
[0136]
本发明中,优选的,步骤三中,yolox模型相较于前几代版本最大的改进在于加入解耦头(decoupled head),使用多个锚框来预测目标的类别与位置,同时yolox模型也加入了许多新的技巧,如将yolo检测器和无锚框检测器结合、加入标签分配策略等。yolox-s模型结构主要分为四个部分:输入端、主干网络、颈部和预测端。
[0137]
本发明中,优选的,步骤四中,gwo算法中存在信息反馈机制,及能够自适应调整的收敛因子,能够实现全局搜索与局部寻优间的平衡,可以改善hho算法的搜索能力,卷积公式(21):
[0138]
t={t1,t2,...th,...t
l
,}
ꢀꢀꢀ
(39)
[0139]
公式(21)中,l表示卷积层总数,第h层卷积层记为th。
[0140]
本发明中,优选的,步骤五中,本实验针对包括雷雨天气、大雾、角度、不同光照条件、不同破损程度和遮挡等条件下的警告标志、禁令标志和指示标志的识别。
[0141]
本发明中,优选的,步骤六中,从训练完成的样本中选取4张具有代表性的图像,这4张图像中目标分别处在目标清晰、目标被遮挡、目标距离远且尺寸小和弱光等环境下,引入hho、gwo、鲸鱼算法(woa)、正余弦算法(sca)与yolox-s结合,分别与yolox-s和gho-yolox算法在相同的环境下进行对比,数据集为中国交通数据集。
[0142]
实施例二:
[0143]
本发明中,优选的,步骤三中,yolox模型相较于前几代版本最大的改进在于加入解耦头(decoupled head),使用多个锚框来预测目标的类别与位置,同时yolox模型也加入了许多新的技巧,如将yolo检测器和无锚框检测器结合、加入标签分配策略等。yolox-s模型结构主要分为四个部分:输入端、主干网络、颈部和预测端。
[0144]
本发明中,优选的,步骤四中,gwo算法中存在信息反馈机制,及能够自适应调整的收敛因子,能够实现全局搜索与局部寻优间的平衡,可以改善hho算法的搜索能力,卷积公式(21):
[0145]
t={t1,t2,...th,...t
l
,}
ꢀꢀꢀ
(40)
[0146]
公式(21)中,l表示卷积层总数,第h层卷积层记为th。
[0147]
本发明中,优选的,步骤五中,本实验针对包括雷雨天气、大雾、角度、不同光照条件、不同破损程度和遮挡等条件下的警告标志、禁令标志和指示标志的识别。
[0148]
本发明中,优选的,步骤六中,从训练完成的样本中选取4张具有代表性的图像,这4张图像中目标分别处在目标清晰、目标被遮挡、目标距离远且尺寸小和弱光等环境下,引入hho、gwo、鲸鱼算法(woa)、正余弦算法(sca)与yolox-s结合,分别与yolox-s和gho-yolox算法在相同的环境下进行对比,数据集为中国交通数据集。
[0149]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1