一种基于投影降维及ssim的三维ct/pet图像区域定位方法
技术领域
1.本发明公开一种基于投影降维及ssim的三维ct/pet图像区域定位算法,涉及计算机图像处理技术,属于计算、推算或计数的技术领域。
背景技术:2.现代医学影像可以分为解剖成像和功能成像两大类。电子计算机断层扫描(computed tomography,ct)属于解剖结构成像,特点是分辨率高,能够提供器官组织的解剖形态信息;正电子发射型计算机断层显像(positron emission computed tomography,pet)属于功能成像,特点是能够提供器官组织的功能代谢信息,但成像分辨率较低。医学临床通常需要将ct成像和pet成像中呈现信息互补的区域图像进行配准整合以提高诊断水平,用于满足监测病灶、治疗验证、术中导航以及目标定位等关键需求。由于成像设备、角度、时段及需求的区别,ct和pet两种模态的采集图像通常会呈现较大的视野及尺寸差异,需要在大视野的模态图像中准确标定出另一小视野模态图像中成像目标的位置,以作为后续图像配准及数据融合的关键前提。
3.多模态医学图像定位是医学图像处理领域极具挑战性的任务,ct图像和pet图像在成像原理、灰度分布、分辨率及视野尺寸等方面的较大差异给区域定位带来明显任务难度。
4.现有多模态医学图像定位技术通常利用基于图像灰度及区域特征的区域定位方法来解决医学图像二维切片的定位问题,且定位目标一般为具体器官或病灶,针对不确定局部区域的定位,往往需要通过人工划定定位范围的方式干预区域定位算法,方可完成医学图像不确定局部区域的定位。
5.基于图像灰度及区域特征的定位方法利用相似性测度进行迭代优化的传统参数搜索方法,通常存在以下两方面的局限:(1)目标图像和待定位图像采集视野差异较小,对目标图像与正确定位区域初始重叠区域的大小有一定要求;(2)将其扩展后用于解决三维多模态图像定位问题,所需时间成本较高,且较难保证定位精度。
6.综上,本发明旨在提出一种基于投影降维及ssim的三维ct/pet图像区域定位方法以克服上述缺陷。
技术实现要素:7.本发明的发明目的是针对上述背景技术的不足,提供一种基于投影降维及ssim的三维ct/pet图像区域定位方法,实现快速准确标定出小视野模态目标图像在另一大视野模态图像中所对应的局部区域位置的发明目的,解决三维ct/pet多模态影像区域定位技术时间成本高且难以保证定位精度的技术问题。针对问题。
8.本发明为实现上述发明目的采用如下技术方案:
9.一种基于投影降维并结合ssim相似性测度和dfp优化算法的三维ct/pet多模态图像区域定位方法,用于医学临床中多模态图像采集视野差异较大情况下,将小视野模态图
像定位到大视野模态图像的对应局部区域,使得解剖成像ct和功能成像pet呈现信息互补的两种模态的图像进行视野自适应的自动化定位,该方法作为后续精配准及图像融合的必要前提以满足诊断需求,包括以下8个步骤。
10.步骤1,取一例pet模态的三维体数据和一例ct模态的三维体数据作为一对三维原始体数据,其中,采集视野较大的三维体数据作为3d待定位固定图像f(x);另一模态的三维体数据即采集视野较小的三维体数据作为3d定位目标浮动图像m(y)。
11.步骤2,分别对pet模态和ct模态的三维体数据进行背景降噪预处理。
12.步骤3,以3d待定位固定图像f(x)的三维体数据为参考,对3d定位目标浮动图像m(y)进行重采样插值,使3d定位目标浮动图像m(y)的体素间距在各维度与3d待定位固定f(x)图像一致。
13.步骤4,分别对3d待定位固定图像f(x)及3d定位目标浮动图像m(y)沿矢状轴和冠状轴做平均密度投影(average intensity projection,aip),得到两个模态图像体数据在两个轴向下的二维投影图。aip方法原理表述如下:
14.aip是沿轴射线方向取连续多层二维切片图像所有投影点灰度的平均值,作为投影图像上的对应点的灰度值,公式如下:
[0015][0016]
式中,aip(x,y)为aip图像中点(x,y)处的灰度值,snr为投影的层数,ik(x,y)为原始模态图像二维切片图像序列中第k层二维切片图像上点(x,y)处的灰度值。
[0017]
步骤5,依据3d定位目标浮动图像沿矢状轴的二维投影图m'(y)的大小,对局部滑窗尺寸进行初始化,在3d待定位固定图像沿矢状轴的二维投影图f'(x)的尺寸范围内设定位置不同的滑窗初始种子,分别根据各滑窗初始种子对3d待定位固定图像沿矢状轴的二维投影图f'(x)截取部分图像,计算根据滑窗截取的3d待定位固定图像沿矢状轴二维投影图部分图像与3d定位目标浮动图像沿矢状轴的二维投影图m'(y)的结构相似测度值(structural similarity,ssim),选取相似测度值最大的滑窗初始种子的位置作为局部滑窗初始位置。给定两张图像x和y,其结构相似性ssim的计算公式及原理表述如下:
[0018][0019]
其中,μ
x
是图像x的像素灰度平均值,μy是图像y的像素灰度平均值,是图像x的像素灰度方差,是图像y的像素灰度方差,σ
xy
是图像x和图像y的像素灰度协方差,c1、c2是用来维持稳定的常数,c1=(k1l)2,c2=(k2l)2l是图像x和图像y像素灰度值的动态范围,k1=0.01,k2=0.03。
[0020]
步骤6,在优化搜索模块中利用dfp优化算法对ssim取负后的目标函数s(f'(x),m'(y))进行优化计算,其中,滑窗位置变换函数trans的参数主要包含二维投影图中两个自由度的平移参数,通过迭代计算得到基于步骤5初始化位置后3d待定位固定图像沿矢状轴二维投影图的最终局部滑窗定位框区间参数。本发明中所采用的dfp优化算法表述为:
[0021]
dfp(davidon-fletcher-powell)算法是拟牛顿优化算法类中的一种,其核心在于
通过迭代计算得到目标函数在参数空间下当前参数坐标点的hessian矩阵的逆的近似估计h;且在ct和pet两种模态的采集图像呈现较大的视野及尺寸差异情况下,相较于其它现有迭代优化的定位方法可以有效规避局部最优解陷落并提高收敛速度;且区别于其它现有技术,对传统dfp优化算法在内存成本方面的改进,本发明针对二维投影图局部滑窗定位框的确定仅涉及两个自由度的平移变换及图像视野尺寸的参数阈值要求,在迭代过程中加入了参数边界限定,保证迭代计算正常进行的同时约束了变换空间,进一步缩短了时间成本。在该算法中,迭代中的滑窗位置变换函数trans的二维平移参数表征为(x1,x2),构成的局部滑窗平移变换参数向量记为x=(x1,x2),梯度向量记为定义参数向量沿优化路径单步更新量为sk=x
k+1-xk,梯度向量更新量为yk=g
k+1-gk,x
k+1
、xk为3d待定位固定图像沿矢状轴二维投影图的局部滑窗定位框平移参数向量的第k+1、第k次迭代值,g
k+1
、gk为梯度向量的第k+1、第k次迭代值,dfp算法迭代计算的矫正公式为:
[0022][0023]
dfp算法流程及公式如下:
[0024]
①
k初始置为0,选择滑窗位置参数空间下的初始参数向量x0,给定预设参数β
′
<β<1和一个对称正定起始矩阵h0;
[0025]
②
计算dk=-h
kgk
,x
k+1
=xk+α
kdk
,其中,步长αk满足wolfe准则:初始设定步长αk=1,其中,x
k+1
约束在3d待定位固定图像沿矢状轴二维投影图大小[x
tl
,x
lr
]区间范围内,h
k+1
、hk为所述结构相似性测度函数在参数空间下的hessian矩阵的第k+1、第k次迭代值;
[0026]
③
由上述中dfp算法迭代计算的矫正公式确定h
k+1
;
[0027]
④
令k:=k+1,并回到第
②
步进行迭代。
[0028]
迭代次数达到设定上限或||g
k+1
||≤ε,其中,ε为提前设定的最小下降速率,即已达到目标精度要求,迭代结束,返回最优解xn,对应到用于区域定位的局部滑窗的最终平移变换参数,并结合滑窗大小确定3d待定位固定图像沿矢状轴二维投影图最终局部滑窗定位框区间参数,即获取3d定位目标浮动图像沿矢状轴的二维投影图区域定位区间参数结果。
[0029]
步骤7,针对3d定位目标浮动图像m(y)和3d待定位固定图像f(x)沿冠状轴二维投影图,采取与步骤5和6相同的处理方法,得到3d待定位固定图像沿冠状轴二维投影图最终局部滑窗定位框区间参数,即获取3d定位目标浮动图像沿冠状轴二维投影图的区域定位区间参数结果。
[0030]
步骤8,综合对3d定位目标浮动图像m(y)沿矢状轴与冠状轴的二维投影图区域定位区间参数结果,得到三维最小封闭并区间,即三维定位区间参数及三维区域定位结果。
[0031]
本发明采用上述技术方案,具有以下有益效果:本发明提出的多模态医学图像区域定位方法,首先对三维多模态医学图像进行投影降维处理,将三维多模态医学图像区域定位问题转换为二维定位问题,降低算法复杂度,以一种模态三维医学图像的局部投影图像与另一模态三维医学图像投影图像的结构相似性测度为目标函数,通过dfp算法优化局部滑窗平移参数以使结构相似性测度最大,利用dfp优化算法的二阶收敛优势提升确定局
部滑窗区间参数的速度,进而缩短在局部滑窗扫描区域内进行定位迭代的计算时间,能够快速准确标定出小视野模态目标图像在另一大视野模态图像中所对应的局部区域位置。
附图说明
[0032]
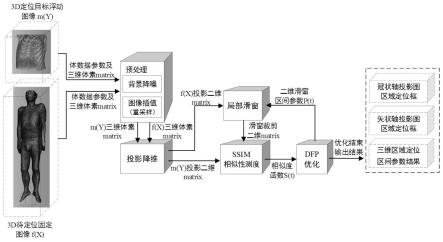
图1为本发明的三维ct/pet图像区域定位算法流程示意图;
[0033]
图2为pet待定位固定图像及ct定位目标浮动图像三维体数据示意图,其中,图2(a)是待定位pet固定图像原始体数据,图2(b)是定位目标ct浮动图像原始体数据,图2(c)、图2(d)和图2(e)分别是待定位pet固定图像原始数据三维切面图,图2(f)、图2(g)和图2(h)分别是定位目标ct浮动图像原始数据三维切面图。
[0034]
图3为三维pet待定位固定图像和三维ct定位目标浮动图像的降维投影图,其中,图3(a)是pet固定图像沿矢状轴的投影图,图3(b)是ct浮动图像沿矢状轴的投影图,图3(c)是pet固定图像沿冠状轴的投影图,图3(d)是ct浮动图像沿冠状轴的投影图。
[0035]
图4为三维pet待定位固定图像进行ct图像目标定位后的区域定位结果示意图,其中,图4(a)是三维pet待定位固定图像沿矢状轴的投影定位结果,图4(b)是三维pet待定位固定图像沿冠状轴的投影定位结果,图4(c)是三维pet待定位固定图像的最终区域定位三维区间框,图4(d)是pet固定图像根据区域定位三维区间框与ct目标图像的体数据匹配结果沿矢状轴视图,图4(e)是pet固定图像根据区域定位三维区间框与ct目标图像的体数据匹配结果沿冠状轴视图。
具体实施方式
[0036]
下面结合具体实施例,进一步阐明本发明,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落于本技术所附权利要求所限定的范围。
[0037]
实施例:一种基于投影降维及ssim的三维ct/pet图像区域定位算法总体流程如图1所示,具体包括如下步骤:
[0038]
步骤1,取待区域定位的一对三维pet和ct模态原始体数据,其中,pet采集视野(对应图像尺寸)较大例,根据需求作为3d待定位固定图像f(x);ct采集视野较小例作为3d定位目标浮动图像m(y)。
[0039]
步骤2,分别对pet和ct模态的三维体数据进行背景降噪预处理。
[0040]
步骤3,以pet模态的3d待定位固定图像f(x)的三维体数据为参考,对ct模态的3d定位目标浮动图像m(y)进行重采样插值,使其体素间距在各维度与3d待定位固定图像一致。
[0041]
步骤4,分别对3d待定位固定图像f(x)及3d定位目标浮动图像m(y)沿矢状轴和冠状轴做平均密度投影(average intensity projection,aip),得到两个模态图像体数据在两个轴向下的二维投影图。
[0042]
步骤5,依据3d定位目标浮动图像沿矢状轴的二维投影图m'(y)大小,对局部滑窗尺寸进行初始化,在3d待定位固定图像沿矢状轴的二维投影图f'(x)尺寸范围内设定位置不同的滑窗初始位置种子,分别将各滑窗口初始种子对3d待定位固定图像沿矢状轴的二维投影图f'(x)截取部分与3d定位目标浮动图像沿矢状轴的二维投影图m'(y)计算结构相似
测度值(structural similarity,ssim),选取最大相似性的种子点作为局部滑窗初始化位置。
[0043]
步骤6,在优化搜索模块中利用dfp优化算法对ssim取负后的目标函数s(f'(x),m'(x))进行优化计算,其中滑窗位置变换参数主要包含二维投影图中两个自由度的平移参数,通过迭代计算得到基于步骤5初始化位置后3d待定位固定图像沿矢状轴二维投影图的最终局部滑窗定位框区间参数,即获取3d定位目标浮动图像沿矢状轴的二维投影图区域定位区间参数结果。
[0044]
步骤7,针对3d定位目标浮动图像m(y)和3d待定位固定图像f(x)沿冠状轴二维投影图,采取与步骤5和6相同的处理方法,得到3d待定位固定图像沿冠状轴二维投影图最终局部滑窗定位框区间参数,即获取3d定位目标浮动图像沿冠状轴二维投影图的区域定位区间参数结果。
[0045]
步骤8,综合对3d定位目标浮动图像m(y)沿矢状轴与冠状轴的二维投影图区域定位区间参数结果,得到三维最小封闭并区间,即三维定位区间参数及三维区域定位结果。
[0046]
效果评估
[0047]
为了验证本发明所公开的三维ct/pet图像区域定位算法的效果,使用人体三维pet-ct两种模态的采集视野差异较大的图像对数据集来验证本发明公开方法在定位精度和速度等算法性能上的一定优势。图2为三维pet待定位固定图像和三维ct定位目标浮动图像的降维投影图,图2(a)所示为待定位pet固定图像原始体数据,图2(b)所示为定位目标ct浮动图像原始体数据,图2(c)、图2(d)和图2(e)所示为待定位pet固定图像原始数据三维切面图,图2(f)、图2(g)和图2(h)所示为定位目标ct浮动图像原始数据三维切面图,通过平均投影方法将三维多模态图像定位问题转换为二维定位问题,三维pet待定位固定图像和三维ct定位目标浮动图像的降维投影图如图3所示,图3(a)所示为pet固定图像沿矢状轴的投影图,图3(b)所示为ct浮动图像沿矢状轴的投影图,图3(c)所示为pet固定图像沿冠状轴的投影图,图3(d)所示为ct浮动图像沿冠状轴的投影图,从数据维度的复杂性角度,使定位算法时间成本有效缩减;同时本发明中dfp优化算法的二阶收敛优势使得在局部滑窗对区域区间定位迭代计算时确定区间参数的速度较大提高,使得计算时间进一步削减;本发明采用ssim作为相似性测度,利用同扫描对象区域结构一致性有效降低了pet和ct不同模态图像的灰度分布差异带来的计算复杂性;图4(a)所示为三维pet待定位固定图像沿矢状轴的投影定位结果,图4(b)所示为三维pet待定位固定图像沿冠状轴的投影定位结果,图4(c)所示为三维pet待定位固定图像的最终区域定位三维区间框,图4(d)所示为pet固定图像根据区域定位三维区间框与ct目标图像的体数据匹配结果沿矢状轴视图,图4中三维pet待定位固定图像进行ct图像目标定位后的最终区域定位及区间内体数据匹配结果清楚体现了本发明中定位算法的较高精度。
[0048]
需要说明的是上述实施例仅仅是本发明的具体实施方式样例,并没有用来限定本发明的保护范围,在上述技术方案的基础上做出的等同替换或者替代,均属于本发明的保护范围。