基于改进主动轮廓模型的无人机影像矿区地裂缝提取方法与流程
1.本发明涉及遥感技术领域,尤其涉及一种基于改进主动轮廓模型的无人机影像矿区地裂缝提取方法。
背景技术:
2.矿区地裂缝的精准认识对防灾、减灾和生态环境修复具有重要意义。目前,针对大型地裂缝通常采用物探技术进行人工探测,但费时费力、成本高,并且无法大范围监测细小裂缝。
3.随着无人机(uav)技术的发展,无人机数据具有获取方便、成本低、精度高等优势,其分辨率可以达到厘米级,利用无人机影像可以实现地表裂缝的精细探测。无人机影像具有超高分辨率、地物细节丰富的特性,但用于矿区地裂缝提取时,容易受矿区地物复杂因素影响,导致地裂缝提取结果存在噪声较多的问题,canny边缘检测算法虽然易提取边缘特征明显的地物,但无法区分非地裂缝信息;支持向量机(svm)算法和最大似然(mlm)算法虽能完整提取地裂缝,但噪声较多,无法满足精度要求;基于深度学习模型对无人机影像进行地裂缝提取效果较好,但需要大量不同类型的地裂缝样本数据。
技术实现要素:
4.本发明的目的在于提出基于改进主动轮廓模型的无人机影像矿区地裂缝提取方法,与其它算法相比,其可以有效增强矿区地裂缝提取的准确度,地裂缝提取效果好。
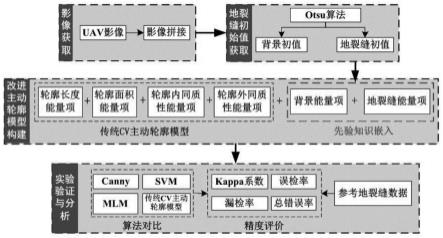
5.为解决上述技术问题,本发明提出的基于改进主动轮廓模型的无人机影像矿区地裂缝提取方法包括如下步骤:
6.步骤s1:获取无人机影像并进行预处理;
7.步骤s2:采用最大类间方差算法自动计算无人机影像的最佳高、低阈值,分别作为背景初值和地裂缝初值;
8.步骤s3:将背景初值和地裂缝初值作为先验知识引入到改进主动轮廓模型,进而提取矿区地裂缝。
9.进一步地,在步骤s1中,所述预处理包括辐射校正、几何校正、配准、拼接、裁剪。
10.进一步地,在步骤s2中,最佳高阈值为最佳低阈值的两倍。
11.进一步地,在步骤s2中,采用最大类间方差算法计算无人机影像的背景和地裂缝最佳阈值的方法为:假设一幅灰度图像i的大小为m
×
n,背景和目标的分割阈值为t,图像i中像素灰度值小于阈值t的目标像素个数为n0,平均灰度为μ0;图像i中像素灰度值大于阈值t的背景像素个数为n1,平均灰度为μ1,则目标像素和背景像素点数占整幅图像的比例分别为ω0和ω1,其计算公式如下:
12.ω0=n0/m
×nꢀꢀꢀ
(式1)
13.ω1=n1/m
×nꢀꢀꢀ
(式2)
14.图像的总平均灰度μ的计算公式如下:
15.μ=ω0*μ0+ω1*μ1ꢀꢀꢀ
(式3)
16.则类间方差g的计算公式如下:
17.g=ω0(μ
0-μ)∧2+ω1(μ
1-μ)∧2
ꢀꢀꢀ
(式4)
18.将(式3)代入(式4),得到等价公式(式5):
19.g=ω0ω1(μ
0-μ)∧2
ꢀꢀꢀ
(式5)
20.进一步地,在步骤s3中,所述改进主动轮廓模型是通过对传统cv主动轮廓模型进行改进,通过最大类间方差算法计算背景区和裂缝区的初值,并将这两部分的区分能量引入到传统cv主动轮廓模型中,其中,传统cv主动轮廓模型如(式6)所示,
21.e(c)=μlength(c)+varea(in(c))+λ1∫
in(c)
|i(x,y)-c1|2dxdy+λ2∫
out(c)
|i(x,y)-c2|2dxdy
ꢀꢀꢀ
(式6)
22.改进主动轮廓模型如(式7)所示:
[0023][0024]
式中,length(c)表示曲线c的长度,μ表示长度参数,area(in(c))表示曲线c内部的面积,v表示面积参数,i(x,y)表示图像中任意像素的灰度,c1表示曲线c内部的平均灰度,c2表示曲线c外部的平均灰度,c3表示背景区的平均灰度,c4表示裂缝区的平均灰度;λ1和λ2是常数,λ1》0,λ2》0。
[0025]
进一步地,采用水平集算法求解改进主动轮廓模型,用水平集函数代替(式7)中的曲线c,则被重写为:
[0026]
[0027][0028]
式中,ω表示整个图像,和分别表示规整化的heaviside函数和dirac函数,ε表示一个很小的正整数。
[0029]
本发明的有益效果是:
[0030]
(1)将最大类间方差算法计算的初值引入到传统cv主动轮廓模型中,可有效消除噪声,排除枯草、陷坑和管道等因素的干扰,使主动轮廓模型更好地应用于地裂缝提取领域;
[0031]
(2)在地物类型较为单一的小范围内探测地裂缝时,改进主动轮廓模型方法提取相对于其它提取方法精度更高,其kappa系数最高,漏检率、误检率和总错误率均较低;
[0032]
(3)在地物类型相对复杂的大范围区域探测地裂缝时,传统的canny边缘检测算法、svm、mlm和传统cv主动轮廓模型方法存在较多的漏提和误提,kappa系数较低,总错误率较高,而改进主动轮廓方法依然可以取得较好的效果,其kappa系数达到0.9左右;
[0033]
(4)本发明应用范围广泛,不仅可对矿区的地裂缝进行提取,还可应用于道路、桥梁、建筑物等裂缝检测中。
附图说明
[0034]
图1是本发明无人机影像矿区地裂缝提取的方法流程图;
[0035]
图2是无人机拍摄的实验区域图;
[0036]
图3是地裂缝提取结果比较图:图3(a)是采用改进主动轮廓模型提取的结果图;图3(b)是canny算法提取的结果图;(c)是采用svm算法提取的结果图;(d)是采用mlm算法提取的结果图;(e)是采用传统cv主动轮廓模型算法提取的结果图;
[0037]
图4是精度评价实验区域图:图4(a)是实验区域1;图4(b)是实验区域2;
[0038]
图5是实验区域1地裂缝提取结果图:图5(a)是参考地裂缝;图5(b)是采用改进主动轮廓模型提取的结果图;图5(c)是采用canny算法提取的结果图;
[0039]
图5(d)是采用svm算法提取的结果图;图5(e)是采用mlm算法提取的结果图;
[0040]
图5(f)是采用传统cv主动轮廓模型提取的结果图;
[0041]
图6是实验区域2地裂缝提取结果图:图6(a)是参考地裂缝;图6(b)是采用改进主动轮廓模型提取的结果图;图6(c)是采用canny算法提取的结果图;
[0042]
图6(d)是采用svm算法提取的结果图;图6(e)是采用mlm算法提取的结果图;
[0043]
图6(f)是采用传统cv主动轮廓模型提取的结果图。
具体实施方式
[0044]
下面结合附图及具体实施例对本发明作进一步详细说明。
和λ2是常数,λ1》0,λ2》0。
[0060]
采用水平集算法求解改进主动轮廓模型,用水平集函数代替(式7)中的曲线c,则被重写为:
[0061][0062][0063]
式中,ω表示整个图像,和分别表示规整化的heaviside函数和dirac函数,ε表示一个很小的正整数。
[0064]
本发明可根据实际需求生成不同分辨率的裂缝提取影像。通过主动轮廓模型不断迭代提取地裂缝,其迭代终止条件包括两个方面:一是根据不同的图像和研究目的,手动将迭代次数设置为不同的迭代次数;另一个是当水平集函数收敛时迭代停止。本发明将最大迭代次数设置为500次,算法不断迭代直到水平集函数收敛。改进后的主动轮廓模型可以在没有明确边界的情况下提取地裂缝,并自动改变拓扑结构,并且可以在没有初始轮廓的情况下实现更好的分割。
[0065]
本发明选取的实例研究区域位于中国内蒙古自治区扎满洲里市赉诺尔矿区,数据源为2021年5月16日利用大疆精灵4rtk无人机所采集的数据,相机的分辨率为4864
×
3648,视场角为84
°
。然后采用pix4d mapper 4.5.2版本的无人机数据处理软件对采集的多幅单张可见光影像进行拼接处理,得到实验区域为空间分辨率2.9cm的可见光正射影像以及用于精度评价的两个实验区域,如图2所示。实验区域主要为塌陷型和拉伸型地裂缝,塌陷型地裂缝宽度和落差较大,拉伸型地裂缝宽度和长度较小。从无人机影像上看,地裂缝呈暗黑色,内部色调差异小,一般成线状。实验区域经计算可得最佳阈值背景值为146,则地裂缝阈值设置为73。
[0066]
采用改进主动轮廓模型方法和传统的canny边缘检测算法、svm算法、mlm、传统cv主动轮廓模型五种算法提取地裂缝的结果,如图3所示,图中的a、b、c、d、e区域为几个典型
地物,这几个典型地物容易被错误提取为地裂缝,a区域中的为白色管道,b区域中的为枯草,c区域中为陷坑,d区域中的为黑色管道,传统的canny边缘检测算法只对边缘信息比较敏感,提取的地裂缝不完整,存在大量的漏提和误提,比如图3(b)a区域中的白色管道被错误识别为地裂缝,效果较差。svm、mlm和传统cv主动轮廓模型三种方法都可以提取较为明显的地裂缝,但与改进主动轮廓模型方法提取结果相比,svm和mlm两种方法存在许多错误提取,比如图3(c)、图3(d)中的b和c区域,将部分枯草和陷坑识别为了地裂缝,mlm方法更为明显,对于图3中的黑色管道d区域,mlm方法同样错误提取为地裂缝,svm方法也提取了部分管道,而改进主动轮廓模型方法并没有错误提取。传统cv主动轮廓模型提取的结果中除了b、c、d三个区域的错误提取外,区域内的枯草几乎被提取为地裂缝,效果最差。而本发明所提出的改进主动轮廓模型方法通过引入最大类间方差(otsu)算法计算的区分能量初值,大量减少了错误提取,可以很好地应用到地裂缝提取的领域中。
[0067]
如图4所示,选取实验区域1和实验区域2进行实验结果的定量评价。实验区域1的范围较小、地物类型单一,只包含裸地和少量地裂缝。实验区域2的范围相对较大,地物类型稍复杂,包含裸地、地裂缝、部分枯草和陷坑。采用目视解译的方法绘制两个实验区域的参考地裂缝,然后分别采用改进主动轮廓模型、传统的canny边缘检测算法、svm、mlm和传统cv主动轮廓模型五种方法提取两个区域的地裂缝,实验区域1和实验区域2的提取结果分别如图5和图6所示。由于实验区域1范围较小、地物类型单一,总体来看这三种方法提取的结果和参考地裂缝的结果较为相似,所有地裂缝均能够被检测出来,只是存在不同程度的误提。而针对地物类型相对复杂的实验区域2来说,较为明显的大地裂缝均被三种方法成功提取,但区域内的枯草和陷坑也不同程度的被错误提取为地裂缝。与svm和mlm两种方法相比,改进的主动轮廓模型方法提取的地裂缝结果与参考地裂缝结果更为接近,错误的噪声点相对较少。
[0068]
传统的canny边缘检测算法和传统cv主动轮廓模型方法提取地裂缝的效果较差,在进行精度评价过程中将不再考虑,只比较改进主动轮廓模型、svm和mlm三种方法提取地裂缝的精度大小。为定量评价三种算法的精度大小,利用kappa系数、漏检率(pma)、误检率(pfa)和总错误率(pte)四个指标来评价两个实验区域提取的地裂缝结果,分别如表1和表2所示。在地物类型较为单一的小范围探测地裂缝时,改进主动轮廓方法和传统方法均可以取得较好的效果,但改进主动轮廓模型方法提取精度更高。在地物类型相对复杂的大范围区域探测地裂缝时,本文提出的改进主动轮廓方法与传统方法相比可以取得更好的效果,kappa系数任能达到0.9左右。
[0069]
表1实验区域1精度评价结果
[0070][0071]
表2实验区域2精度评价结果
[0072][0073]
当然,基于本发明的无人机影像裂缝提取方法,不仅适用于矿区地裂缝的提取,也可以适应于其它工业场合的无人机影像裂缝提取,如道路、桥梁、建筑物等。
[0074]
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本发明宗旨的前提下可以作出的各种变化,都处于本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1