一种引线框架引脚间距的高精度测量方法
1.本发明属于机器视觉领域,具体涉及一种引线框架引脚间距的高精度测量方法。
背景技术:
2.目前半导体芯片广泛应用于计算机设备、网络通信、汽车电子和航空航天等领域,是一切现代生活的基础。随着集成电路的大规模发展,芯片封装工艺也越来越受到重视。半导体引线框架是连接半导体内核芯片接触点和金属引线的框架,目前有蚀刻和冲压两种工艺,由于生产工艺的限制,引线框架可能出现引脚变形、相邻引脚间距过小等缺陷,这些缺陷可能导致金属引线在键合时定位不准和芯片与框架间导通不良等问题,对引线框架的产品质量检测是芯片封装技术的重要环节。
3.近年来机器视觉在制造业和自动化检测技术中的应用越来越广泛,同时芯片封装完成后无法对其内部直接使用传统的光学检测方式和尺寸检测方式,而利用x射线的穿透性和芯片封装内各部分材料对x射线的吸收率差异,容易获得超高分辨率的结构成像。虽然有一些专业软件具有尺寸测量的功能,但是仍需人工逐一标注,且由于引线框架引脚数量众多以及对精度要求高,一般传统的人工方式为对其进行抽检或者全检,面对复杂的生产环境,导致用人成本增高,且人工效率不高,容易出现误检漏检等情况;同时由于引脚本身尺寸小,目前的像素级别的尺寸检测误差大,达不到高精度测量的要求,难以保证引线框架引脚质量。
技术实现要素:
4.为解决上述问题,本发明公开了一种引线框架引脚间距的高精度测量方法,通过机器视觉图像处理技术实现引线框架引脚间距量测,代替人工抽检或全检,提高效率,同时满足亚像素级别的高精度测量的要求。
5.为达到上述目的,本发明的技术方案如下:
6.一种引线框架引脚间距的高精度测量方法,具体步骤为:
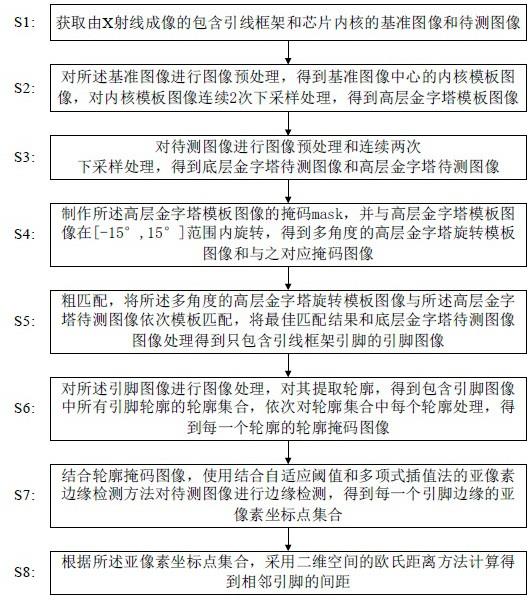
7.步骤1:获取由x射线成像的包含引线框架和芯片内核的基准图像和待测图像;
8.步骤2:对步骤1中的基准图像进行图像预处理,得到基准图像中心的内核模板图像,对内核模板图像连续2至4次下采样处理,得到高层金字塔模板图像;
9.步骤3:对步骤1中的待测图像进行图像预处理和连续2至4次下采样处理,得到底层金字塔待测图像和高层金字塔待测图像;
10.步骤4:制作步骤2中高层金字塔模板图像的掩码mask,并与高层金字塔模板图像在[-20
°
~-10
°
,10
°
~20
°
]范围内旋转,得到多角度的高层金字塔旋转模板图像和与之对应的多角度的高层金字塔旋转掩码图像;
[0011]
步骤5:粗匹配,将步骤4中的多角度的高层金字塔旋转模板图像与步骤3中的高层金字塔待测图像依次模板匹配,将最佳匹配结果和步骤3中底层金字塔待测图像融合得到只包含引线框架引脚的引脚图像;
[0012]
步骤6:对步骤5中的引脚图像进行图像处理,然后对其提取轮廓,得到包含引脚图像中所有引脚轮廓的轮廓集合,依次对轮廓集合中每个轮廓处理,得到每一个轮廓的轮廓掩码图像;
[0013]
步骤7:结合轮廓掩码图像,使用结合自适应阈值和多项式插值法的亚像素边缘检测方法对步骤1中的待测图像进行边缘检测,得到每一个引脚边缘的亚像素坐标点集合;
[0014]
步骤8:根据步骤7中的亚像素坐标点集合,采用二维空间的欧氏距离方法计算得到相邻引脚的间距。
[0015]
进一步地,步骤1中的基准图像和待测图像为高分辨率灰度图像。
[0016]
进一步地,所述步骤2的具体方法为:
[0017]
步骤2-1:对步骤1中的基准图像阈值分割,利用最大类间方差法得到基准图像的灰度阈值,高于灰度阈值的像素点灰度值变为255,高于灰度阈值的像素点灰度值变为0,得到基准阈值分割图像;
[0018]
步骤2-2:对步骤2-1中基准阈值分割图像中心裁剪,裁剪范围为距离芯片内核的外围200至300像素距离处,得到内核模板图像;
[0019]
步骤2-3:所述步骤2-2中对内核模板图像进行连续2至4次下采样处理,具体为:以内核模板图像作为底层金字塔模板图像,对底层金字塔模板图像抽取奇数行和奇数列,获得图像尺寸为底层金字塔模板图像行和列的1/2的第一层金字塔模板图像;对第一层金字塔模板图像抽取奇数行和奇数列,获得图像尺寸为第一层金字塔模板图像行和列的1/2的第二层金字塔模板图像;重复上述操作2-4次,得到高层金字塔模板图像。
[0020]
进一步地,所述步骤3中,对步骤1中的待测图像进行图像预处理和下采样处理,其中图像预处理方法同步骤2-1中的阈值分割步骤一致,以处理后的图像作为底层金字塔待测图像,下采样处理方法同步骤2-3中下采样处理具体步骤一致,得到高层金字塔待测图像。
[0021]
进一步地,所述步骤4中制作掩码mask和对高层金字塔模板图像旋转,具体方法为:
[0022]
步骤4-1:制作步骤2中高层金字塔模板图像的掩码mask,定义模板图像所在区域为感兴趣区域,掩码mask中感兴趣区域位置的灰度值为1,非感兴趣区域位置的灰度值为0;
[0023]
步骤4-2:所述步骤4的图像旋转中,旋转范围为[-20
°
~-10
°
,10
°
~20
°
];旋转目标为高层金字塔模板图像以及与之旋转角度一一对应的步骤4-1中制作的掩码mask,旋转后的掩码mask中非感兴趣区域位置的灰度值为0,不参与模板匹配计算;每次旋转角度的步长为(layer+1),其中layer指的是当前旋转目标所在层数;以旋转前的高层金字塔模板图像作为旋转角度为0
°
时的高层金字塔旋转模板图像。
[0024]
进一步地,所述步骤5中粗匹配的具体步骤为:
[0025]
步骤5-1:将步骤4中的高层金字塔旋转模板图像在[-20
°
~-10
°
,10
°
~20
°
]的旋转范围内依次与步骤3中高层金字塔待测图像模板匹配,旋转角度的步长为(layer+1),高层金字塔旋转模板图像在高层金字塔待测图像上窗口式滑动,计算在每个位置上的匹配度,得到高层最佳匹配位置(x0,y0)和旋转角度theta;
[0026]
匹配度计算采用归一化相关系数法,其公式为:
[0027][0028]
其中,r表示匹配度,范围为[-1,1],t表示模板图像,s表示待测图像,m表示下标对应图像灰度平均值,(u,v)表示roi区域的每一个坐标点;
[0029]
步骤5-2:根据步骤5-1中高层最佳匹配位置(x0,y0)和旋转角度theta,得到在步骤3中的底层金字塔待测图像上的底层最佳匹配位置(2
l
*x0,2
l
*y0)和旋转角度theta,其中l指的高层金字塔模板图像所在具体层数;
[0030]
步骤5-3:根据步骤5-2中得到的底层最佳匹配位置(2
l
*x0,2
l
*y0)和旋转角度theta,可得到匹配结果在底层金字塔待测图像上的矩形区域,将该矩形区域范围的图像灰度置为255,即可得到只包含引线框架引脚的引脚图像。
[0031]
进一步地,所述步骤6中图像处理和轮廓处理操作,具体方法为:
[0032]
步骤6-1:所述步骤6中的图像处理为,对步骤5-3中的引脚图像形态学腐蚀操作,使引脚图像中白色区域变窄,黑色区域变宽,腐蚀操作的内核矩阵大小为5*5;接着令腐蚀后的图像的四周边界处的灰度值变为255,边界大小为一个像素距离;接着对图像处理后的图像提取轮廓,得到包含引脚图像中所有引脚轮廓的轮廓集合;
[0033]
步骤6-2:对步骤6-1中轮廓集合的处理为,将轮廓内部灰度置为0,轮廓外部部分灰度置为220至240之间,使轮廓外部部分灰度分布均匀,避免灰度阶跃变化,得到每一个轮廓的轮廓掩码图像;根据每个轮廓的中心位置将所有引脚轮廓按照顺时针排序。
[0034]
进一步地,所述步骤7中,结合轮廓掩码图像,将步骤1中的待测图像的每一个引脚区域单独提取出来,接着对引脚区域进行亚像素边缘检测,所述亚像素边缘检测,具体步骤为:
[0035]
步骤7-1:构建4个方向的sobel偏导算子模板,方向分别为水平、垂直、45度和135度方向;将模板依次与上述引脚区域进行计算,得到这四个4个方向的梯度图像,然后对这4个梯度图像逐像素搜寻最大梯度和对应梯度方向,得到伪边缘图像;
[0036]
sobel偏导算子模板如下:
[0037][0038]
以p(x,y)表示某点(x,y)像素灰度值,所述各方向梯度计算公式如下:
[0039]
g1(x,y)=[p(x+1,y-1)+2*p(x+1,y)+p(x+1,y+1)]-[p(x-1,y-1)+2*p(x-1,y)+p(x-1,y+1)]
[0040]
g2(x,y)=[p(x-1,y-1)+2*p(x,y-1)+p(x+1,y-1)]-[p(x-1,y+1)+2*p(x,y+1)+p(x+1,y+1)]
[0041]
g3(x,y)=[p(x,y-1)+2*p(x+1,y-1)+p(x+1,y)]-[p(x-1,y)+2*p(x-1,y+1)+p(x,y+1)]
[0042]
g4(x,y)=[p(x,y-1)+2*p(x-1,y-1)+p(x-1,y)]-[p(x,y+1)+2*p(x+1,y+1)+p(x+1,y)]
[0043]
其中,gi(x,y)表示第i偏导算子模板计算后某点(x,y)处的梯度;
[0044]
步骤7-2:所述步骤7-1中,计算得到最大梯度和对应梯度方向,由于使用了四个方向的sobel偏导算子模板,伪边缘图像中边缘并不是单一像素点,若亚像素边缘检测,需要求只有单一像素的边缘,对像素点(x,y)判断是否为最佳边缘点,得到伪边缘图像的最佳边缘点集合,具体的判断方法为:
[0045]
g(x0,y0)》=g(x1,y1)and g(x0,y0)》=g(x2,y2)
[0046]
其中,点(x0,y0)为最佳边缘点,点(x1,y1)和点(x2,y2)为点(x0,y0)处沿梯度方向上的相邻两点;
[0047]
所述步骤7-2中,在判断是否为最佳边缘点之前还应对步骤7-1中的伪边缘图像使用自适应阈值法和非极大值抑制方法进行筛选,利用最小阈值和最大阈值过滤掉某些突变的干扰点和弱边缘,最大阈值通过对伪边缘图像使用最大类间方差法自适应确定,最小阈值为最大阈值的0.4至0.6倍之间;自适应阈值使每个轮廓的边缘点的筛选过滤过程更有针对性,不同亮度和对比度的局部引脚区域将会拥有相对应的局部阈值;
[0048]
步骤7-3:所述步骤7-2中得到的最佳边缘点集合,对其采用基于拉格朗日多项式插值法进行拟合,得到亚像素边缘点集合,其中插值函数为:
[0049][0050]
其中,xk为插值点,yk为离散函数值,(xi,yi)为边缘点;
[0051]
求解亚像素坐标公式为:
[0052][0053][0054]
其中,(x,y)为亚像素边缘点,r0为点(xi,yi)处的灰度幅值,r1和r2是点(xi,yi)沿梯度方向的相邻点的灰度幅值,这里灰度幅值用梯度幅值近似得到。
[0055]
进一步地,所述步骤8中二维空间的欧式距离方法为:
[0056]
d=min{d1,d2,d3,
…
},
[0057]
其中,di是指分别来自相邻轮廓点集合的两个边缘点的距离;
[0058]
所述步骤8中,在求取两个边缘点集合的最短距离时,由于引脚数量较多且每个引脚的亚像素边缘点集合包含大量的点,于是采用分治法求取两个亚像素边缘点集合的最短距离,依次对相邻引脚的亚像素边缘点集合计算得到最短距离。
[0059]
本发明的有益效果是:
[0060]
本技术提供了一种引线框架引脚间距的高精度测量方法,在获取到基准图像和待测图像后,对基准图像进行图像处理以及图像旋转,得到多角度的高层金字塔旋转模板图像和对应的掩码mask,然后采用归一化互相关匹配方法将其与高层金字塔待测图像进行模板匹配;将匹配结果与底层金字塔待测图像融合得到只包含引线框架引脚区域的引脚图像;对引脚图像轮廓检测并对每个轮廓进行边缘扩充得到引脚掩码图像,将引脚掩码图像与待测图像融合得到引脚粗定位图像;采用结合自适应阈值和多项式插值法对引脚粗定位图像进行亚像素边缘检测,得到亚像素边缘点集合;对相邻轮廓的边缘点集合计算最小距
离,得到相邻引线框架引脚的间距;由于模板匹配的目的仅是确定感兴趣区域,采用高层金字塔图像进行模板匹配,可以提高匹配速度;通过机器视觉图像处理技术实现引线框架引脚间距量测,代替人工抽检或全检,提高效率;同时为提高精度引入亚像素边缘检测,具有计算精度高的特点。
附图说明
[0061]
图1为本发明提供的一种引线框架引脚间距的高精度测量方法的流程图;
[0062]
图2为只包含引线框架引脚的引脚图像局部放大示意图;
[0063]
图3为轮廓掩码图像局部放大示意图,与图2选自同一区域;
[0064]
图4为用图3中的掩码区域提取待测图像得到的结果;
[0065]
图5为引脚亚像素坐标点位置的放大图像的示意图。
具体实施方式
[0066]
下面结合附图和具体实施方式,进一步阐明本发明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。
[0067]
如图1,本发明提供了一种引线框架引脚间距的高精度测量方法,通过机器视觉图像处理技术实现引线框架引脚间距量测,代替人工抽检或全检,提高效率,同时满足亚像素级别的高精度测量的要求,具体步骤如下:
[0068]
步骤1:获取由x射线成像的包含引线框架和芯片内核的基准图像和待测图像,两者均为8位灰度图像,分辨率大小为1536*1536;
[0069]
步骤2:对步骤1中的基准图像进行图像预处理,得到基准图像中心的内核模板图像,对所述内核模板图像连续两次下采样,得到高层金字塔模板图像;
[0070]
步骤3:对步骤1中的待测图像进行图像预处理和连续两次下采样处理,得到底层金字塔待测图像和高层金字塔待测图像;
[0071]
步骤4:制作步骤2中高层金字塔模板图像的掩码mask,并与高层金字塔模板图像在[-15
°
,15
°
]范围内旋转,得到多角度的高层金字塔旋转模板图像和与之对应的多角度的高层金字塔旋转掩码图像;
[0072]
步骤5:粗匹配,将步骤4中的多角度的高层金字塔旋转模板图像与步骤3中的高层金字塔待测图像依次模板匹配,根据最大匹配相似度的位置坐标和旋转角度,对所述步骤3中底层金字塔待测图像进行图像处理以得到只包含引线框架引脚的引脚图像,如图2为其局部放大图;
[0073]
步骤6:对步骤5中的引脚图像进行图像处理,然后对其提取轮廓,得到包含引脚图像中所有引脚轮廓的轮廓集合,依次对轮廓集合中每个轮廓处理,包括轮廓边缘扩充,得到每一个轮廓的轮廓掩码图像,轮廓掩码图像中图2所在区域示意图如图3;
[0074]
步骤7:结合轮廓掩码图像,将步骤1中的待测图像中的每个引脚单独提取出来,使用结合自适应阈值和多项式插值法的亚像素边缘检测方法对其边缘检测,得到每一个引脚边缘的亚像素坐标点集合;
[0075]
步骤8:根据步骤7中的亚像素坐标点集合,采用二维空间的欧氏距离方法计算得到相邻引脚的间距。
[0076]
进一步地,所述步骤2的具体方法为:
[0077]
步骤2-1:对步骤1中的基准图像阈值分割,利用最大类间方差法得到基准图像的灰度阈值,在该实施例中,灰度阈值为128,高于灰度阈值的像素点灰度值变为255,高于灰度阈值的像素点灰度值变为0,得到基准阈值分割图像;
[0078]
步骤2-2:在该实施例中,对步骤2-1中基准阈值分割图像中心裁剪,裁剪范围为距离芯片内核的外围230像素距离处,得到内核模板图像;
[0079]
步骤2-3:所述步骤2-2中对内核模板图像进行连续两次下采样处理,具体为:以内核模板图像作为底层金字塔模板图像,对底层金字塔模板图像抽取奇数行和奇数列,获得图像尺寸为底层金字塔模板图像行和列的1/2的第一层金字塔模板图像;对第一层金字塔模板图像抽取奇数行和奇数列,获得图像尺寸为第一层金字塔模板图像行和列的1/2的第二层金字塔模板图像,第二层金字塔模板图像即为该实施例中的高层金字塔模板图像。
[0080]
进一步地,所述步骤3中,对步骤1中的待测图像进行图像预处理和下采样处理,其中图像预处理方法同步骤2-1中的阈值分割步骤一致,以处理后的图像作为底层金字塔待测图像,其中灰度阈值由最大类间方差法计算为120,下采样处理方法同步骤2-3中下采样处理具体步骤一致,得到高层金字塔待测图像。
[0081]
进一步地,所述步骤4中制作掩码mask和对高层金字塔模板图像旋转,具体方法为:
[0082]
步骤4-1:制作步骤2中高层金字塔模板图像的掩码mask,定义模板图像所在区域为感兴趣区域,掩码mask中感兴趣区域位置的灰度值为1,非感兴趣区域位置的灰度值为0,非感兴趣区域不参与匹配计算过程;
[0083]
步骤4-2:在该实施例中,所述步骤4的图像旋转中,旋转范围为[-15
°
,15
°
];旋转目标为高层金字塔模板图像以及与之旋转角度一一对应的步骤4-1中制作的掩码mask,旋转后的掩码mask中非感兴趣区域位置的灰度值为0,不参与模板匹配计算;每次旋转角度的步长为(layer+1),其中layer指的是当前旋转目标所在层数,例如在第一层,旋转角度的步长为2;以旋转前的高层金字塔模板图像作为旋转角度为0
°
时的高层金字塔旋转模板图像,得到多角度的高层金字塔旋转模板图像和多角度的高层金字塔旋转掩码图像。
[0084]
进一步地,所述步骤5中粗匹配的具体步骤为:
[0085]
步骤5-1:将步骤4中的高层金字塔旋转模板图像在[-15
°
,15
°
]的旋转范围内依次与步骤3中高层金字塔待测图像模板匹配,旋转角度的步长为3
°
,高层金字塔旋转模板图像在高层金字塔待测图像上窗口式滑动,计算在每个位置上的匹配度,得到高层最佳匹配位置(x0,y0)和旋转角度theta;
[0086]
匹配度计算采用归一化相关系数法,其公式为:
[0087][0088]
其中,r表示匹配度,范围为[-1,1],t表示模板图像,s表示待测图像,m表示下标对应图像灰度平均值,(u,v)表示roi区域的每一个坐标点;
[0089]
步骤5-2:根据步骤5-1中高层最佳匹配位置(x0,y0)和旋转角度theta,根据下采样次数2,得到在步骤3中的底层金字塔待测图像上的底层最佳匹配位置(4*x0,4*y0)和旋
转角度theta;
[0090]
步骤5-3:根据步骤5-2中得到的底层最佳匹配位置(4*x0,4*y0)和旋转角度theta,可得到匹配结果在底层金字塔待测图像上的矩形区域,将该矩形区域范围的图像灰度置为255,图像剩余部分灰度值均为0,即可得到只包含引线框架引脚的引脚图像,如图2所示,为所述引脚图像局部放大示意图,其空白区域灰度值为255。
[0091]
进一步地,所述步骤6中对引脚图像提取轮廓,可以得到图像中的轮廓个数和每个轮廓的坐标点集合,在该实施例中,轮廓数量为104,对这104个轮廓依次进行边缘扩充得到104个轮廓掩码图像,并与步骤1中的待测图像融合,得到104个引脚感兴趣区域。
[0092]
进一步地,所述步骤6中图像处理和轮廓处理操作,具体方法为:
[0093]
步骤6-1:所述步骤6中的图像处理为,对步骤5-3中的引脚图像形态学腐蚀操作,使引脚图像中白色区域变窄,黑色区域变宽,腐蚀操作的内核矩阵大小为5*5;接着令腐蚀后的图像的四周边界处的灰度值变为255,该边界大小为一个像素的距离;接着对图像处理后的图像提取轮廓,得到包含引脚图像中所有引脚轮廓的104个轮廓集合;
[0094]
步骤6-2:对步骤6-1中每一个轮廓集合的处理为,将轮廓内部灰度置为0,轮廓外部部分灰度置为230,使轮廓外部部分灰度分布均匀,避免灰度阶跃变化,得到104个轮廓的轮廓掩码图像,轮廓掩码图像中图2所在区域示意图如图3,其空白区域灰度值为230;
[0095]
在该实施例中,为保证后续能准确定位两个相邻轮廓,还应对所述104个轮廓按照每个轮廓的中心位置将所有引脚轮廓顺时针排序。
[0096]
进一步地,所述步骤7中,结合轮廓掩码图像,将步骤1中的待测图像的每一个引脚区域单独提取出来,图4是以图3为掩码部分提取得到的结果,白色区域灰度值为230,接着对引脚区域进行亚像素边缘检测,所述亚像素边缘检测,具体步骤为:
[0097]
步骤7-1:构建4个方向的sobel偏导算子模板,方向分别为水平、垂直、45度和135度方向;将模板依次与上述引脚区域进行计算,得到这四个4个方向的梯度图像,然后对这4个梯度图像逐像素搜寻最大梯度和对应梯度方向,得到伪边缘图像;
[0098]
sobel偏导算子模板如下:
[0099][0100]
以p(x,y)表示某点(x,y)像素灰度值,所述各方向梯度计算公式如下:
[0101]
g1(x,y)=[p(x+1,y-1)+2*p(x+1,y)+p(x+1,y+1)]-[p(x-1,y-1)+2*p(x-1,y)+p(x-1,y+1)]
[0102]
g2(x,y)=[p(x-1,y-1)+2*p(x,y-1)+p(x+1,y-1)]-[p(x-1,y+1)+2*p(x,y+1)+p(x+1,y+1)]
[0103]
g3(x,y)=[p(x,y-1)+2*p(x+1,y-1)+p(x+1,y)]-[p(x-1,y)+2*p(x-1,y+1)+p(x,y+1)]
[0104]
g4(x,y)=[p(x,y-1)+2*p(x-1,y-1)+p(x-1,y)]-[p(x,y+1)+2*p(x+1,y+1)+p(x+1,y)]
[0105]
其中,gi(x,y)表示第i偏导算子模板计算后某点(x,y)处的梯度;
[0106]
步骤7-2:所述步骤7-1中,计算得到最大梯度和对应梯度方向,由于使用了四个方
向的sobel偏导算子模板,伪边缘图像中边缘并不是单一像素点,若亚像素边缘检测,需要求只有单一像素的边缘,对像素点(x,y)判断是否为最佳边缘点,得到伪边缘图像的最佳边缘点集合,具体的判断方法为:
[0107]
g(x0,y0)>=g(x1,y1)and g(x0,y0)>=g(x2,y2)
[0108]
其中,点(x0,y0)为最佳边缘点,点(x1,y1)和点(x2,y2)为点(x0,y0)处沿梯度方向上的相邻两点;
[0109]
在该实施例中,所述步骤7-2中,在判断是否为最佳边缘点之前还应对步骤7-1中的伪边缘图像使用自适应阈值法和非极大值抑制方法进行筛选,利用最小阈值和最大阈值过滤掉某些突变的干扰点和弱边缘,最大阈值通过对伪边缘图像使用最大类间方差法自适应确定为161,最小阈值为最大阈值的0.5倍;自适应阈值使每个轮廓的边缘点的筛选过滤过程更有针对性,不同亮度和对比度的局部引脚区域将会拥有相对应的局部阈值;
[0110]
步骤7-3:所述步骤7-2中得到的最佳边缘点集合,对其采用基于拉格朗日多项式插值法进行拟合,得到亚像素边缘点集合,其中插值函数为:
[0111][0112]
其中,xk为插值点,yk为离散函数值,(xi,yi)为边缘点;
[0113]
求解亚像素坐标公式为:
[0114][0115][0116]
其中,(x,y)为亚像素边缘点,r0为点(xi,yi)处的灰度幅值,r1和r2是点(xi,yi)沿梯度方向的相邻点的灰度幅值,这里灰度幅值用梯度幅值近似得到。
[0117]
在该实施例中,针对图4所示引脚区域,计算得到的亚像素坐标点集合与未采用亚像素边缘检测得到坐标点集合对比表格如下,以y轴坐标为例:
[0118] p1p2p3p4p5p6p7x轴1311131213131314131913271336(y轴)像素级820819819819820821822(y轴)亚像素级819.146818.833818.899818.967819.655820.455821.674
[0119]
在该实例高分辨率的图像中,使用亚像素级边缘检测方法可以得到更精确的坐标点位置,为方便观察将图像放大10倍,引脚亚像素坐标点位置示意图如图5所示。
[0120]
进一步地,所述步骤8中二维空间的欧式距离方法为:
[0121]
d=min{d1,d2,d3,
…
},
[0122]
其中,di是指分别来自相邻轮廓点集合的两个边缘点的距离;
[0123]
在该实施例中,所述步骤8中,在求取两个边缘点集合的最短距离时,由于引脚数量较多且每个引脚的亚像素边缘点集合包含大量的点,于是采用分治法求取两个亚像素边缘点集合的最短距离,依次对相邻引脚的亚像素边缘点集合计算得到最短距离;
[0124]
所述分治法,是把一个复杂的问题分成两个或更多的相同或相似的子问题,再把子问题分成更小的子问题,直到最后子问题可以简单的直接求解。在该实施例中,首先将来自不同轮廓点集合中的每个点做标记,定义其所述轮廓索引号,然后依次对相邻轮廓的点集合使用分治法,计算最短距离和记录最短距离时的点对。
[0125]
需要说明的是,以上内容仅仅说明了本发明的技术思想,不能以此限定本发明的保护范围,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰均落入本发明权利要求书的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1