一种橡胶缓冲基座指标预测方法及装置与流程
1.本发明涉及橡胶缓冲基座设计技术领域,特别是涉及一种橡胶缓冲基座指标预测方法及装置。
背景技术:
2.惯导技术(惯性导航技术)为陆用运载体提供自主、实时、精确的导航信息,广泛应用于陆用车辆及相应的武器装备中。然而,在实际的车载应用环境中,冲击严重降低惯导系统的精度和使用寿命,并且存在破坏设备的风险。为应对冲击对惯导设备精度和使用寿命的影响,需要为在冲击环境使用中的惯导设备配备缓冲基座,橡胶减振器具有承载能力高、成本低、性能好、体积小以及设计灵活的优点,满足惯导设备缓冲基座小型化和高缓冲效率的设计要求。因此,基于橡胶减振器的橡胶缓冲基座成为惯导设备的主流缓冲基座。
3.最大缓冲行程和缓冲效率是橡胶缓冲基座的重要指标,为了在惯导橡胶缓冲基座设计阶段预测其最大缓冲行程和缓冲效率,需要在设计阶段对橡胶缓冲基座的指标作出精确预测以验证设计的合格性。例如,发明申请cn112668191a构建了橡胶缓冲基座的解析式动力学模型来预测橡胶缓冲基座的指标,发明申请cn112762136a和cn112765740a分别利用解析式方法获得了橡胶缓冲基座的缓冲行程和缓冲效率。
4.然而,上述现有的针对橡胶缓冲基座的指标预测方法需要定义坐标系并在动力学建模过程中引入复杂的坐标变换,存在着建模复杂、计算繁琐、不利于工程使用的问题。振动力学分析中的集总参数分析法将复杂的动力学系统简化为简单的由集总参数系数,结构形式简单,可以简便、快速、完备地对复杂机械系统进行动力学分析。例如,发明申请cn115019613a公开了一种基于集总参数的人体心血管系统及其建模方法和应用快速、简便地构建了人体心血管系统的模型。因此,基于集总参数系统的动力学分析方法有望解决现有的橡胶缓冲基座的指标预测方法存在的问题。
技术实现要素:
5.本发明所要解决的技术问题是:提供一种基于集总参数系统的橡胶缓冲基座指标预测方法,使建模更简单、计算更快速,以便于在工程中使用。
6.为了解决上述技术问题,本发明采用的一种技术方案为:
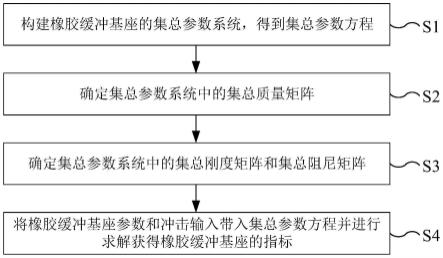
7.一种橡胶缓冲基座指标预测方法,包括以下步骤:
8.s1、构建橡胶缓冲基座的集总参数系统,得到集总参数方程:
9.δ(t)为集总质量位移向量,为集总质量速度向量,为δ(t)对时间的一次导数;为集总质量加速度向量,为δ(t)对时间的二次导数。
10.s2、定义集总参数系统中的集总质量矩阵m;
11.s3、定义集总参数系统中的集总刚度矩阵k和集总阻尼矩阵c;
12.s4、将橡胶缓冲基座参数和冲击输入加速度向量代入集总参数方程;
13.其中,冲击输入加速度向量为橡胶缓冲基座参数包括:集总质量矩阵m,集总刚度矩阵k,集总阻尼矩阵c;
14.s5、求解集总参数方程获得橡胶缓冲基座的指标;
15.其中,所述指标包括第一指标,所述第一指标为最大缓冲行程,所述最大缓冲行程等于集总质量位移向量δ(t)在冲击方向的分量的最大值的绝对值。
16.为了解决上述技术问题,本发明采用的另一种技术方案为:
17.一种预测橡胶缓冲基座指标的装置,其特征在于,所述预测橡胶缓冲基座指标的装置包括:
18.一个或多个处理器;
19.存储装置,用于存储一个或多个程序;
20.当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现上述的橡胶缓冲基座指标预测方法。
21.进一步地,所述预测橡胶缓冲基座指标的装置还包括惯导模块、支架、橡胶减振器、支撑柱、底板;
22.所述支撑柱固定于所述底板上;所述支架设置于所述支撑柱上;所述支撑柱与所述支架之间还具有所述橡胶减振器;所述惯导模块置于所述支架中部,并且所述惯导模块的重心与所有所述橡胶减振器构成的几何中心重合;所述惯导模块与所述处理器通信连接。
23.本发明的有益效果在于:克服现有的针对橡胶缓冲基座的指标预测方法需要定义坐标系并在动力学建模过程中引入复杂的坐标变换,存在着建模复杂、计算繁琐、不利于工程使用的问题,提供一种基于集总参数系统的橡胶缓冲基座指标预测方法,该方法利用集总参数系统对橡胶缓冲基座动力学的指标进行预测,具有建模简单、不需要复杂的动力学分析推导过程、计算快速,便于工程使用的优点,实用性佳。
附图说明
24.图1为本发明实施例的一种橡胶缓冲基座指标预测方法的流程图;
25.图2为本发明实施例的一种橡胶缓冲基座指标预测方法的在步骤s1中构建的橡胶缓冲基座的集总参数系统的示意图;
26.图3为本发明的实施例利用本发明的方法获得的缓冲行程在冲击方向上的分量示意图;
27.图4为本发明的实施例利用本发明的方法获得的惯导加速度在冲击方向上的分量示意图;
28.图5为本发明实施例的橡胶缓冲基座的结构示意图;
29.图6为本发明实施例的橡胶缓冲基座的结构爆炸图示意图;
30.图7为本发明实施例的验证本发明的方法所进行的试验验证的试验环境示意图;
31.标号说明:
32.1、惯导模块;2、支架;3、橡胶减振器;4、支撑柱;5、底板;6、集总质量矩阵;7、集总刚度矩阵;8、集总阻尼矩阵;9、冲击输入位移向量;10、惯导装置的绝对位移向量;11、冲击
台台面;12、冲击台;13、加速度传感器;14、加速度传感器信号线;15、陆用惯导信号线;16、数据采集电脑。
具体实施方式
33.为详细说明本发明的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
34.一种橡胶缓冲基座指标预测方法,包括以下步骤:
35.s1、构建橡胶缓冲基座的集总参数系统,得到集总参数方程:
[0036][0037]
δ(t)为集总质量位移向量,为集总质量速度向量,为δ(t)对时间的一次导数;为集总质量加速度向量,为δ(t)对时间的二次导数。
[0038]
s2、定义集总参数系统中的集总质量矩阵m;
[0039]
s3、定义集总参数系统中的集总刚度矩阵k和集总阻尼矩阵c;
[0040]
s4、将橡胶缓冲基座参数和冲击输入加速度向量代入集总参数方程;
[0041]
其中,冲击输入加速度向量为橡胶缓冲基座参数包括:集总质量矩阵m,集总刚度矩阵k,集总阻尼矩阵c;
[0042]
s5、求解集总参数方程获得橡胶缓冲基座的指标;
[0043]
其中,所述指标包括第一指标,所述第一指标为最大缓冲行程,所述最大缓冲行程等于集总质量位移向量δ(t)在冲击方向的分量的最大值的绝对值。
[0044]
进一步地,所述指标还包括第二指标,第二指标为缓冲效率,进一步地,所述指标还包括第二指标,第二指标为缓冲效率,
[0045]
进一步地,步骤s1的所述集总参数方程中的参数具体为:
[0046]
为u(t)对时间的二次导数,u(t)为冲击输入位移向量;
[0047]
δ(t)由z(t)-u(t)计算得到,其中z(t)为惯导装置的绝对位移向量。
[0048]
进一步地,步骤s2中所述集总质量矩阵为:
[0049][0050]
其中,m为惯导装置与支架组合体的质量,r
x
、ry、rz分别为惯导装置与支架组合体的质心相较于惯导装置与支架组合体的几何中心的三个方向偏差,其中,r
x
、ry、rz分别对应x、y、z方向,x、y、z方向分别为惯导装置的右方、前方和上方,j
xx
、j
xy
、j
xz
、j
yx
、j
yy
、j
yz
、j
zx
、j
zy
、j
zz
分别为惯导装置与支架组合体的转动惯量矩阵的第一行第一列分量、第一行第二列
分量、第一行第三列分量、第二行第一列分量、第二行第二列分量、第二行第三列分量、第三行第一列分量、第三行第二列分量、第三行第三列分量。
[0051]
进一步地,步骤s3中所述集总刚度矩阵k为:
[0052][0053]
其中各个非零分量由下面各式确定:
[0054]kxx
=k
yy
=k
zz
=nk
[0055]kαα
=nk(l2+h2)
[0056]kββ
=nk(w2+h2)
[0057]kγγ
=nk(w2+l2)
[0058]
其中,n为橡胶减振器的个数,k为橡胶减振器的刚度,w为橡胶减振器相对惯导装置与支架组合体的质心在x方向的距离的绝对值,l为橡胶减振器相对惯导装置与支架组合体的质心在y方向的距离的绝对值,h为橡胶减振器相对惯导装置与支架组合体的质心在z方向的距离的绝对值。
[0059]
进一步地,步骤s3中所述集总阻尼矩阵c为:
[0060][0061]
其中各个非零分量由下面各式确定:
[0062]cxx
=c
yy
=c
zz
=nc
[0063]cαα
=nc(l2+h2)
[0064]cββ
=nc(w2+h2)
[0065]cγγ
=nc(w2+l2)
[0066]
其中,c为橡胶减振器的刚度。
[0067]
进一步地,步骤s4和s5中的参数具体为:
[0068][0069]
其中,分别为冲击输入在x方向的线性分量、y方向的线性分量、z方向的线性分量、x方向的旋转分量、y方向的旋转分量、z方向的旋转分量;
[0070]
δ(t)=[δ
x
(t) δy(t) δz(t) δ
α
(t) δ
β
(t) δ
γ
(t)]
t
[0071]
其中,δ
x
(t)、δy(t)、δz(t)、δ
α
(t)、δ
β
(t)、δ
γ
(t)分别为惯导装置相对于底板的位移在x方向的线性分量、y方向的线性分量、z方向的线性分量、x方向的旋转分量、y方向的旋转
分量、z方向的旋转分量;
[0072][0073]
其中,分别为惯导装置相对于底板的加速度在x方向的线性分量、y方向的线性分量、z方向的线性分量、x方向的旋转分量、y方向的旋转分量、z方向的旋转分量。
[0074]
从上述描述可知,本发明的有益效果在于:克服现有的针对橡胶缓冲基座的指标预测方法需要定义坐标系并在动力学建模过程中引入复杂的坐标变换,存在着建模复杂、计算繁琐、不利于工程使用的问题,提供一种基于集总参数系统的橡胶缓冲基座指标预测方法,该方法利用集总参数系统对橡胶缓冲基座动力学的指标进行预测,具有建模简单、不需要复杂的动力学分析推导过程、计算快速,便于工程使用的优点,实用性佳。
[0075]
一种预测橡胶缓冲基座指标的装置,包括:
[0076]
一个或多个处理器;
[0077]
存储装置,用于存储一个或多个程序;
[0078]
当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现上述的橡胶缓冲基座指标预测方法。
[0079]
进一步地,所述预测橡胶缓冲基座指标的装置还包括惯导模块、支架、橡胶减振器、支撑柱、底板;
[0080]
所述支撑柱固定于所述底板上;所述支架设置于所述支撑柱上;所述支撑柱与所述支架之间还具有所述橡胶减振器;所述惯导模块置于所述支架中部,并且其重心与所有所述橡胶减振器构成的几何中心重合;所述惯导模块与所述处理器通信连接。
[0081]
由上述描述可知,该装置可以预测出橡胶缓冲基座的重要指标,即最大缓冲行程和缓冲效率。其中,通过惯导模块在缓冲基座缓冲过程中,使橡胶减振器变形,得出惯导模块相对底板的位移的最大值,测得最大缓冲行程;通过在惯导模块在缓冲基座缓冲过程中,计算惯导模块重心的最大加速度与底板上最大加速度的比值,测得缓冲效果。
[0082]
本发明上述一种橡胶缓冲基座指标预测方法及装置,能够避免定义坐标系以及产生复杂的动力学分析推导过程,使建模更简单、计算更快速,以便于在工程中使用,以下通过具体实施方式进行说明:
[0083]
实施例一
[0084]
参见附图1,对一种基于集总参数系统的橡胶缓冲基座指标预测方法进行具体过程描述,具体步骤如下:
[0085]
s1、构建橡胶缓冲基座的集总参数系统,得到集总参数方程;
[0086]
s2、确定集总参数系统中的集总质量矩阵;
[0087]
s3、确定集总参数系统中的集总刚度矩阵和集总阻尼矩阵;
[0088]
s4、将橡胶缓冲基座参数和冲击输入代入集总参数方程;
[0089]
s5、求解获得橡胶缓冲基座的指标。
[0090]
参见附图4,在步骤s1中,构建的集总参数系统包括集总质量矩阵6、集总刚度矩阵7、集总阻尼矩阵8、冲击输入位移向量9、集总质量位移向量;基于构建的集总参数系统得到集总参数方程为:
[0091][0092]
其中,m为集总质量矩阵,k为集总刚度矩阵,c为集总阻尼矩阵;u(t)为冲击输入位移向量;为冲击输入加速度向量,为u(t)对时间的二次导数;δ(t)为集总质量位移向量,δ(t)由z(t)-u(t)计算得到;为集总质量速度向量,为δ(t)对时间的一次导数;为集总质量加速度向量,为δ(t)对时间的二次导数;
[0093]
在步骤s2中,确定的集总参数系统中的集总质量矩阵为:
[0094][0095]
其中,m为惯导模块与支架组合体的质量,r
x
、ry、rz分别为惯导模块与支架组合体的质心相较于惯导模块与支架组合体的几何中心的三个方向偏差(r
x
、ry、rz分别对应x、y、z方向,x、y、z方向分别为惯导模块的右方、前方和上方),j
xx
、j
xy
、j
xz
、j
yx
、j
yy
、j
yz
、j
zx
、j
zy
、j
zz
分别为惯导模块与支架组合体的转动惯量矩阵的第一行第一列分量、第一行第二列分量、第一行第三列分量、第二行第一列分量、第二行第二列分量、第二行第三列分量、第三行第一列分量、第三行第二列分量、第三行第三列分量;具体地,m、r
x
、ry、rz、j
xx
、j
xy
、j
xz
、j
yx
、j
yy
、j
yz
、j
zx
、j
zy
、j
zz
可在橡胶缓冲基座设计阶段由三维建模软件中的质量测量功能获得。
[0096]
在本实施例中,集总质量矩阵m中各个非零分量的取值为:m=20kg,r
x
=ry=rz=0,j
xx
=1.3
×
105kg
·
mm2,j
yy
=1.9
×
105kg
·
mm2,j
zz
=2.0
×
105kg
·
mm2,j
xy
=j
xz
=j
yx
=j
yz
=j
zx
=j
zy
=0,因此,在本实施例中,集总质量矩阵m写为:
[0097][0098]
在步骤s3中,由于所设计的橡胶缓冲基座满足动力学解耦条件,确定的集总参数系统中的集总刚度矩阵为:
[0099][0100]
集总刚度矩阵中各个非零分量可由下面各式确定:
[0101]kxx
=k
yy
=k
zz
=nk
[0102]kαα
=nk(l2+h2)
[0103]kββ
=nk(w2+h2)
[0104]kγγ
=nk(w2+l2)
[0105]
其中,n为橡胶减振器的个数,k为橡胶减振器的刚度,w为橡胶减振器相对惯导模块与支架组合体的质心在x方向(惯导模块右方)的距离的绝对值,l为橡胶减振器相对惯导模块与支架组合体的质心在y方向(惯导模块前方)的距离的绝对值,h为橡胶减振器相对惯导模块与支架组合体的质心在z方向(惯导模块上方)的距离的绝对值;
[0106]
在步骤s3中,确定的集总参数系统中的集总阻尼矩阵为:
[0107][0108]
集总阻尼矩阵中各个非零分量可由下面各式确定:
[0109]cxx
=c
yy
=c
zz
=nc
[0110]cαα
=nc(l2+h2)
[0111]cββ
=nc(w2+h2)
[0112]cγγ
=nc(w2+l2)
[0113]
其中,c为橡胶减振器的刚度;k和c根据国标号为gb/t 15168-2013的国家标准通过试验测试得到;w、l和h可在橡胶缓冲基座设计阶段由三维建模软件中的位置测量功能获得。
[0114]
具体地,在本实施例中,n、k、c、w、l、h的取值分别为:4、300n/mm、0.1n
·
s/mm、94mm、223mm、0;因此,在本实施例中,集总参数系统中的集总刚度矩阵和集总阻尼矩阵分别计算得到为:
[0115][0116][0117]
在步骤s4中,代入到集总参数方程中的橡胶缓冲基座参数有:集总质量矩阵m,集总刚度矩阵k,集总阻尼矩阵c;代入到集总参数方程中的冲击输入加速度向量为对集总参数方程进行求解获得的是:集总质量位移向量δ(t),集总质量速度向量集总质量加速度向量
[0118]
具体地,可以写为:
[0119][0120]
其中,分别为冲击输入在x方向的线性分量、y方向的线性分量、z方向的线性分量、x方向的旋转分量、y方向的旋转分量、z方向的旋转分量;
[0121]
具体地,δ(t)可以写为:
[0122]
δ(t)=[δ
x
(t) δy(t) δz(t) δ
α
(t) δ
β
(t) δ
γ
(t)]
t
[0123]
其中,δ
x
(t)、δy(t)、δz(t)、δ
α
(t)、δ
β
(t)、δ
γ
(t)分别为惯导模块相对于底板的位移在x方向的线性分量、y方向的线性分量、z方向的线性分量、x方向的旋转分量、y方向的旋转分量、z方向的旋转分量;
[0124]
δ(t)在冲击方向的分量的最大值的绝对值即为橡胶缓冲基座的两个指标中的第一个指标:最大缓冲行程;
[0125]
具体地,可以写为:
[0126][0127]
其中,分别为惯导模块相对于底板的加速度在x方向的线性分量、y方向的线性分量、z方向的线性分量、x方向的旋转分量、y方向的旋转分量、z方向的旋转分量;
[0128]
具体地,缓冲效率的计算方法为:具体地,缓冲效率的计算方法为:缓冲效率即为橡胶缓冲基座的两个指标中的第二个指标;
[0129]
具体地,求解集总参数方程的方法为龙格-库塔法,可利用matlab软件中自带的ode45函数进行求解。
[0130]
在本实施例中,分别将
[0131][0132]
代入取为y方向的周期为2ms、幅值为200g的半正弦波冲击,即:
[0133]
计算时间设为0.8s,利用本发明分别得到如图5所示的冲击方向(y方向)的缓冲行程以及如图6所示的冲击方向(y方向)的惯导加速度;
[0134]
从图1中可知,冲击方向缓冲行程的最大值绝对值为4.8mm,所以获得的最大缓冲行程为:4.8mm;
[0135]
从图2中可知冲击方向惯导加速度最大值的绝对值为:29.5,从而计算得到橡胶缓冲基座的缓冲效率为:(200g-29.5g)/200g=85.25%;
[0136]
因此,最终获得的橡胶缓冲基座的两个指标为:最大缓冲行程为4.8mm,缓冲效率为85.25%;
[0137]
实施例二
[0138]
本实施例与实施例一的不同在于,参见附图5和附图6,本发明的安装了惯导设备后的橡胶缓冲基座系统包括:惯导模块1;支架2;橡胶减振器3;支撑柱4;底板5;
[0139]
橡胶缓冲基座的衰减冲击的工作原理为:支架2和支撑柱4的配置将惯导模块1的重心和四个橡胶减振器3构成的减振器阵列中心重合,减小冲击给惯导模块1的运动耦合。冲击从安装面通过底板5传向橡胶缓冲基座,四个橡胶减振器3构成的减振器阵列通过减振器变形衰减冲击,最终使到达支架2和陆用惯导模块1上的冲击远小于底板5上的冲击输入,最终提高惯导模块1的精度和使用寿命;
[0140]
最大缓冲行程和缓冲效率是橡胶缓冲基座的重要指标,最大缓冲行程指的是惯导模块1在缓冲基座缓冲过程中由于橡胶减振器3变形造成的惯导模块1相对底板5的位移的最大值;缓冲效果指的是惯导模块1在缓冲基座缓冲过程中惯导模块1重心的最大加速度与底板5上最大加速度的比值。
[0141]
参见附图7,为验证本发明的基于橡胶减振器的缓冲装置解析式动力学建模方法的正确性,参见附图7搭建试验验证环境开展试验验证,将安装好惯导模块1的橡胶缓冲基座安装于冲击台12的冲击台台面11上,惯导模块1通过陆用惯导信号线15将惯导相关数据传输到数据采集电脑16,设置于冲击台台面11上的加速度传感器13通过加速度传感器信号线14将加速度数据传输到数据采集电脑16。
[0142]
给冲击台12施加y方向(惯导模块朝前方向)的加速度冲击,所施加的冲击与在本发明计算中设置的冲击一致,即:输入的冲击条件为周期为2ms,幅值为200g的半正弦波冲击;利用惯导模块1自身的导航功能获得惯导模块1相对于橡胶缓冲基座的底板5的冲击方向缓冲行程和冲击方向加速度;最后,利用数据采集电脑16同步采集惯导模块1的相对于橡胶缓冲基座的底板5的冲击方向缓冲行程和冲击方向加速度;将冲击方向缓冲行程的最大
值绝对值作为橡胶缓冲基座的最大缓冲行程,值绝对值作为橡胶缓冲基座的最大缓冲行程,最终,利用试验获得的橡胶缓冲基座的指标为:最大缓冲行程为4.7mm,缓冲效率为84%,采用本发明方法获得的最大缓冲行程和缓冲效率和试验结果的相对误差分别为:2%和1%。因此,本发明提供的方法具有很好的准确性。
[0143]
综上所述,本发明提供的一种橡胶缓冲基座指标预测方法及装置,通过构建橡胶缓冲基座的集总参数系统,定义质量、刚度、阻尼参数相关矩阵,求解集总参数方程,从而更简便地得到指标参数。
[0144]
需要说明的是,对于前述的各方法实施例,为了简便描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本发明并不受所描述的动作顺序的限制,因为依据本发明,某些步骤可以采用其它顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于优选实施例,所涉及的动作和模块并不一定都是本发明所必须的。
[0145]
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其它实施例的相关描述。
[0146]
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
[0147]
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1