一种用于太阳能电池板虚焊异常的检测方法与流程
1.本发明涉及图像处理技术领域,具体涉及一种用于太阳能电池板虚焊异常的检测方法。
背景技术:
2.在太阳能电池板的制作过程中,电池片的焊接质量十分关键,焊接质量直接影响太阳能电池板的整体质量和使用效果。太阳能电池片的焊接一般分为单焊和串焊。串焊的焊接效率要高于单焊,但是单焊的焊接质量在一定条件下要优于串焊。因此串焊设备的焊接质量的提升,能大大提高生产效率。太阳能电池焊接工序是组件生产过程中的一道重要工序,其主要收集电池片上面的电流并通过互连条汇集输送出去。太阳能电池焊接效果的好坏直接影响着电流收集效率,电流收集的越多,电池板组件功率损失越,电流收集的越少,电池板组件功率损失越多。
3.太阳能电池组件在完成焊接拼装后,为避免出现虚焊现象,需要使用虚焊检测装置进行虚焊检测,虚焊是指焊点处只有少量的锡焊柱,这样会造成电流接触不良。近年来,随着人工智能技术的发展,计算机视觉检测技术广泛应用于太阳能电池组件的检测,就太阳能电池组件的虚焊检测来说,由于使用计算机视觉检测技术存在透视畸变的影响,因而在进行太阳能电池组件虚焊检测时不仅存在较大误差,也无法准确反映太阳能电池组件整体的虚焊程度。
技术实现要素:
4.为了解决现有技术中对太阳能电池组件进行虚焊检测时检测精度低下,以及无法反映整体的虚焊程度的技术问题;本发明提供了一种用于太阳能电池板虚焊异常的检测方法,该方法利用霍夫变换先行判断是否有过焊缺陷,再对侧视裁剪图像进行霍夫变换来判断是否有虚焊异常,并提取异常部位,快速判断电池板在生产环节中是否有虚焊异常的出现,有效避免了细小的焊接异常在人工检测中易被忽略的问题,提高了检测精度及效率。有鉴于此,本发明通过以下技术方案予以实现。
5.一种用于太阳能电池板虚焊异常的检测方法,包括以下步骤:选取焊接后的太阳能电池板组件,从所述太阳能电池板组件的上方获取第一图像,从所述太阳能电池板组件的侧方获取第二图像,所述的第二图像为太阳能电池板组件的倾斜角度图像;对所述第一图像进行霍夫变换获取第一霍夫空间图像;对所述第二图像进行霍夫变换获取第二霍夫空间图像;获取所述第一霍夫空间图像中的多个亮点,并根据多个所述亮点对应的角度的大小获取过焊亮点;根据每个过焊亮点的像素值和角度获取每个过焊亮点的特征值;对所述第二霍夫空间图像进行阈值分割获取所述第二霍夫空间图像中的多个异常亮点;根据每个异常亮点的像素值和角度获取每个异常亮点的特征值;
获取每个所述异常亮点的特征值与每个过焊亮点特征值的比值,根据所述比值的大小,以及所述异常亮点对应的角度大小与所述过焊亮点对应的角度的大小,获取异常亮点中的过焊亮点,根据异常亮点中的过焊亮点获取异常亮点中的多个虚焊亮点;根据每个虚焊亮点的特征值的大小,以及每个虚焊亮点对应的角度和距离的大小对多个虚焊亮点进行分类;根据得到的类型数量及每个类型中每一个虚焊亮点的特征值判断太阳能电池板组件在进行焊接时的虚焊程度。
6.进一步地,还包括对所述第一图像进行二值化处理和对所述第二图像进行二值化处理。
7.进一步地,获取所述第一霍夫空间图像中的多个亮点的过程为:对所述第一霍夫空间图像进行大津自适应阈值分割,将所述第一霍夫空间图像中各交点的像素值大于最佳分割阈值交点作为亮点。
8.进一步地,获取所述第一霍夫空间图像中的多个亮点的过程中还包括根据每个所述亮点对应的角度判断所述太阳能电池板组件是否存在过焊缺陷。
9.进一步地,所述过焊亮点的特征值通过下式确定:式中,为太阳能电池板组件中第个过焊亮点的特征值;为太阳能电池板组件中第个过焊亮点的像素值;为太阳能电池板组件中第个过焊亮点对应的角度。
10.进一步地,获取所述第二霍夫空间图像中的多个异常亮点的过程为:利用大津自适应阈值分割法对所述第二霍夫空间图像进行第一次阈值分割,其中小于最佳分割阈值的部分为背景交点部分,并将背景交点部分像素值置为0;大于最佳分割阈值的亮点部分像素值不变,获得初始二值化图像;利用大津自适应阈值分割法对所述初始二值化图像进行第二次阈值分割,其中大于最佳分割阈值的亮点部分为正常亮点,并将正常亮点像素值置为0,将小于最佳分割阈值的亮点部分像素值不变;由此获得所述第二霍夫空间图像中的多个异常亮点。
11.进一步地,获取多个虚焊亮点的过程为:将所述异常亮点的特征值从小到大进行排列;将所述过焊亮点特征值从小到大进行排列;获取上述排列中第一个异常亮点的特征值与第一个过焊亮点特征值的第一比值,当所述第一比值大于第一阈值且小于第二阈值,且所述第一个异常亮点对应的角度小于第一个过焊亮点对应的角度,且满足第一个异常亮点对应的角度和第一个过焊亮点对应的角度同正或同负时,所述第一个异常亮点为所述第二霍夫空间图像中的过焊亮点;当所述第一比值不同时满足上述条件时,获取所述第一个异常亮点的特征值与第二个过焊亮点特征值的第二比值,只要所述第一个异常亮点的特征值与任一过焊亮点特征值的比值满足上述条件,即可将第一个异常亮点确定为所述第二霍夫空间图像中的过焊亮点;依次对每个异常亮点的特征值进行上述操作,获取所述第二霍夫空间图像中的全部过焊亮点;
将第二霍夫空间图像中的全部过焊亮点的像素值置为0,则所述第二霍夫空间图像中的像素值未置0的异常亮点为虚焊亮点;由此获得获取多个虚焊亮点。
12.进一步地,所述第一阈值为0.98,所述第二阈值为1.02。
13.进一步地,所述确定虚焊亮点的类型个数的过程为:将多个虚焊亮点按照其特征值的大小从小到大进行排序,获取第二个虚焊亮点的特征值与第一个虚焊亮点的特征值的比值,当所述比值大于第三阈值时,第二个虚焊亮点与第一个虚焊亮点不属于同一类型,并将所述第二个虚焊亮点设置为第二类虚焊类型;当所述比值小于或等于第三阈值时,还需判断所述第一个虚焊亮点与第二个虚焊亮点对应的角度和距离的大小,当所述第一个虚焊亮点与第二个虚焊亮点对应的角度和距离的大小满足虚焊亮点的角度递减、距离递增时,将所述第二个虚焊亮点设置为第一类虚焊类型,并获取所述第三个虚焊亮点的特征值与第一个虚焊亮点的特征值的比值,根据上述步骤判断第三个虚焊亮点的类型;如不满足,仍将所述第二个虚焊亮点设置为第二类虚焊类型;并获取所述第三个虚焊亮点的特征值与第二个虚焊亮点的特征值的比值,根据上述步骤判断第三个虚焊亮点的类型;依次获取多个虚焊亮点的虚焊类型,并确定虚焊亮点的类型个数。
14.进一步地,所述太阳能电池板组件的虚焊程度值通过下式确定:式中,为太阳能电池板组件的虚焊程度值;为第个虚焊类型的虚焊亮点的个数;为第个虚焊类型的虚焊亮点中初始虚焊亮点的特征值,为虚焊亮点的类型个数。
15.与现有技术相比,本发明的有益效果是:本发明提供了一种用于太阳能电池板虚焊异常的检测方法,该方法通过选取焊接后的太阳能电池板组件,从太阳能电池板组件的上方获取第一图像,并从太阳能电池板组件的侧方获取第二图像;进一步地,对第一图像进行霍夫变换获取第一霍夫空间图像;对第二图像进行霍夫变换获取第二霍夫空间图像;获取第一霍夫空间图像中的多个亮点,并根据多个亮点对应的角度的大小获取过焊亮点;由此可确定太阳能电池板组件中的过焊亮点;根据每个过焊亮点的像素值和角度获取每个过焊亮点的特征值;由此可确定每个过焊亮点的特征值;进一步地,获取第二霍夫空间图像中的多个异常亮点;根据每个异常亮点的像素值和角度获取每个异常亮点的特征值;由此可确定每个异常亮点的特征值;进一步地,获取每个异常亮点的特征值与任一过焊亮点特征值的比值,根据比值的大小,以及异常亮点对应的角度大小与过焊亮点对应的角度的大小,从多个异常亮点中获取多个虚焊亮点;由此可确定太阳能电池板组件的虚焊亮点;由此,本发明通过对第二霍夫空间图像中的焊亮点进行筛除处理,获得了第二霍夫空间图像中的所有虚焊亮点,根据全部虚焊亮点可准确判断太阳能电池板组件的虚焊程度,在获取光伏电池板组件的虚焊程度时可排除过焊亮点对虚焊程度的影响。
16.本发明的方法还通过根据每个虚焊亮点的特征值的大小,以及每个虚焊亮点对应的角度和距离的大小对多个虚焊亮点进行分类,确定虚焊亮点的类型个数;进一步地,根据
虚焊亮点的类型个数和和每个类型的第一个虚焊亮点的特征值获取太阳能电池板组件的虚焊程度值;本发明对虚焊亮点进行分类的目的是确定每个类型的虚焊亮点对光伏电池板组件的影响程度,分类后可根据每个类型中虚焊亮点的个数和每个类型的第一个虚焊亮点的特征值准确反映光伏电池板组件的整体虚焊程度;通过本发明的技术方案,解决了相关技术中,在对太阳能电池组件进行虚焊检测时检测精度低下,以及无法反映整体的虚焊程度的技术问题。
附图说明
17.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
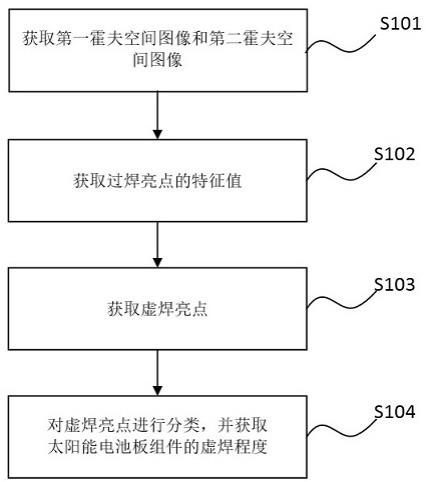
18.图1为本发明实施例提供的虚焊异常的检测方法的流程示意图。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.本实施例提供了一种用于太阳能电池板虚焊异常的检测方法,如图1所示,检测方法包括:s101,选取焊接后的太阳能电池板组件,从太阳能电池板组件的上方获取第一图像,从太阳能电池板组件的侧方获取第二图像;对第一图像进行灰度化处理获取第一灰度图像;对第二图像进行灰度化处理获取第二灰度图像;需要说明的是,从太阳能电池板组件的侧方获取第二图像时应确保太阳能电池板组件所有焊接完成的板面中,正常部位应处在同一直线上,以避免因透视畸变影响对第二图像的判断;同时,为了便于对第二图像的霍夫空间图像进行分析,每次在采集第二图像时,要保证太阳能电池板组件的副栅线部分经透视畸变不会出现过大角度的倾斜;本实施例中,为了确保检测的准确性,还需要对第一图像和第二图像进行平滑滤波处理,以对第一图像和第二图像进行降噪处理;在从太阳能电池板组件的侧方获取第二图像时,是以太阳能电池板组件的侧方45
°
取第二图像;对第一灰度图像进行二值化处理获取第一目标图像;对第二灰度图像进行二值化处理获取第二目标图像;以第一目标图像的左下角第一个像素点为坐标原点,水平方向为横坐标方向,竖直方向为纵坐标方向对第一图像进行霍夫变换获取第一霍夫空间图像;以第一目标图像的左下角第一个像素点为坐标原点,水平方向为横坐标方向,竖直方向为纵坐标方向对第二图像进行霍夫变换获取第二霍夫空间图像;需要说明的是,本实施例中,第一霍夫空间图像中每个交点的横坐标为该交点对应的第一图像中直线到坐标原点的距离与第一图像中横坐标的夹角;第一霍夫空间图像中
每个交点的纵坐标为该交点对应的第一图像中直线到坐标原点的距离;第二霍夫空间图像中每个交点的横坐标为该交点对应的第二图像中直线到坐标原点的距离与第二图像中横坐标夹角的角度;第二霍夫空间图像中每个交点的纵坐标为该交点对应的第二图像中直线到坐标原点的距离;s102,对第一霍夫空间图像进行大津自适应阈值分割,获取第一霍夫空间图像中像素值大于最佳分割阈值的交点为亮点;获取每个亮点对应角度的正弦值和余弦值中的最小值;根据每个亮点对应角度的正弦值和余弦值中的最小值判断第一霍夫空间图像是否存在过焊亮点;当第一霍夫空间图像全部亮点对应角度的正弦值和余弦值中的最小值的平均值不等于0时,第一霍夫空间图像存在过焊亮点;获取第一霍夫空间图像中亮点对应的角度范围为的亮点为过焊亮点,并根据每个亮点的像素值和每个亮点对应的角度获取每个过焊亮点的特征值;过焊亮点的特征值通过下式确定:式中,为第一霍夫空间图像中第个过焊亮点的特征值;为第一霍夫空间图像中第个过焊亮点的像素值;为第一霍夫空间图像中第个过焊亮点对应的角度;需要说明的是,式中实际上为该亮点所对应的直线在原图像水平坐标轴上的投影,且该投影不会因为相机拍摄角度而引发的透视畸变所改变,可以用作判断该过焊缺陷的特征值;s103,获取第二霍夫空间图像中的多个异常亮点;获取第二霍夫空间图像中的多个异常亮点的过程为:利用大津自适应阈值分割法对第二霍夫空间图像进行第一次阈值分割,其中小于最佳分割阈值的部分为背景交点部分,并将背景交点部分像素值置为0;大于最佳分割阈值的亮点部分像素值不变,获得初始二值化图像;利用大津自适应阈值分割法对初始二值化图像进行第二次阈值分割,其中大于最佳分割阈值的亮点部分为正常亮点,并将正常亮点像素值置为0,将小于最佳分割阈值的亮点部分像素值不变;由此获得第二霍夫空间图像中的多个异常亮点;根据每个异常亮点的像素值和角度获取每个异常亮点的特征值;异常亮点的特征值通过下式确定:式中,为第二霍夫空间图像中第个异常亮点的特征值;为第二霍夫空间图像中第个异常亮点的像素值;为第二霍夫空间图像中第个异常亮点对应的角度;表示第二图像中异常缺陷部位所在直线对应于第二图像的横坐标上的投影,该投影用于表示异常亮点的特征值;获取每个异常亮点的特征值与任一过焊亮点特征值的比值,根据比值的大小,以及异常亮点对应的角度大小与过焊亮点对应的角度的大小,从多个异常亮点中获取多个虚
焊亮点;获取多个虚焊亮点的过程为:将异常亮点的特征值从小到大进行排列;将过焊亮点特征值从小到大进行排列;获取上述排列中第一个异常亮点的特征值与第一个过焊亮点特征值的第一比值,当第一比值大于第一阈值且小于第二阈值,且第一个异常亮点对应的角度小于第一个过焊亮点对应的角度,且满足第一个异常亮点对应的角度和第一个过焊亮点对应的角度同正或同负时,第一个异常亮点为第二霍夫空间图像中的过焊亮点;当第一比值不同时满足上述条件时,获取第一个异常亮点的特征值与第二个过焊亮点特征值的第二比值,只要第一个异常亮点的特征值与任一过焊亮点特征值的比值满足上述条件,即可将第一个异常亮点确定为第二霍夫空间图像中的过焊亮点;依次对每个异常亮点的特征值进行上述操作,获取第二霍夫空间图像中的全部过焊亮点;将第二霍夫空间图像中的全部过焊亮点的像素值置为0,则第二霍夫空间图像中的像素值未置0的异常亮点为虚焊亮点;由此获得获取多个虚焊亮点;需要说明的是,本实施例中根据实施条件设置的第一阈值为0.98,第二阈值为1.02,实施者可根据实施时的误差程度设置其他的值作为第一阈值或第二阈值;s104,根据每个虚焊亮点的特征值的大小,以及每个虚焊亮点对应的角度和距离的大小对多个虚焊亮点进行分类,确定虚焊亮点的类型个数;确定虚焊亮点的类型个数的过程为:将多个虚焊亮点按照其特征值的大小从小到大进行排序,获取第二个虚焊亮点的特征值与第一个虚焊亮点的特征值的比值,当比值大于第三阈值时,第二个虚焊亮点与第一个虚焊亮点不属于同一类型,并将第二个虚焊亮点设置为第二类虚焊类型;当比值小于或等于第三阈值时,还需判断第一个虚焊亮点与第二个虚焊亮点对应的角度和距离的大小,当第一个虚焊亮点与第二个虚焊亮点对应的角度和距离的大小满足时,即先获取第二个虚焊亮点对应的角度和第一个虚焊亮点对应的角度的第一差值,在获取与第二个虚焊亮点对应的距离和第一个虚焊亮点对应的距离的第二差值;当第二差值与第一差值的比值小于0时,将第二个虚焊亮点设置为第一类虚焊类型,并获取第三个虚焊亮点的特征值与第一个虚焊亮点的特征值的比值,根据上述步骤判断第三个虚焊亮点的类型;如不满足,仍将第二个虚焊亮点设置为第二类虚焊类型;并获取第三个虚焊亮点的特征值与第二个虚焊亮点的特征值的比值,根据上述步骤判断第三个虚焊亮点的类型;依次获取多个虚焊亮点的虚焊类型,并确定虚焊亮点的类型个数;根据虚焊亮点的类型个数和和每个类型的第一个虚焊亮点的特征值获取太阳能电池板组件的虚焊程度值;太阳能电池板组件的虚焊程度值通过下式确定:式中,为太阳能电池板组件的虚焊程度值;为第个虚焊类型的虚焊亮点的个数;为第个虚焊类型的虚焊亮点中初始虚焊亮点的特征值,为虚焊亮点的类型个数;表示第个虚焊类型的虚焊亮点的个数与第个虚焊类型的虚焊亮点中初始虚焊亮点的特征值,通过个数与初始虚焊亮点的特征值的乘积表示太阳能电池板组件中每一
类型虚焊亮点整体的虚焊程度;根据太阳能电池板组件的虚焊程度值判断太阳能电池板组件的虚焊程度,太阳能电池板组件的虚焊程度值越大,太阳能电池板组件的虚焊程度越严重;本实施例中,还可以根据每个虚焊亮点在太阳能电池板组件上的位置对太阳能电池板组件上的虚焊区域进行定位;根据太阳能电池板组件的虚焊程度,以及太阳能电池板组件上的虚焊区域,实施者可对存在虚焊的太阳能电池板组件进行维修处理,以保证太阳能电池板组件的正常使用。
21.综上,本实施例提供了一种用于太阳能电池板虚焊异常的检测方法,包括:选取焊接后的太阳能电池板组件,从太阳能电池板组件的上方获取第一图像,从太阳能电池板组件的侧方获取第二图像;对第一图像进行霍夫变换获取第一霍夫空间图像;对第二图像进行霍夫变换获取第二霍夫空间图像;获取第一霍夫空间图像中的多个亮点,并根据多个亮点对应的角度的大小获取过焊亮点;根据每个过焊亮点的像素值和角度获取每个过焊亮点的特征值;获取第二霍夫空间图像中的多个异常亮点;根据每个异常亮点的像素值和角度获取每个异常亮点的特征值;获取每个异常亮点的特征值与任一过焊亮点特征值的比值,根据比值的大小,以及异常亮点对应的角度大小与过焊亮点对应的角度的大小,从多个异常亮点中获取多个虚焊亮点;根据每个虚焊亮点的特征值的大小,以及每个虚焊亮点对应的角度和距离的大小对多个虚焊亮点进行分类,确定虚焊亮点的类型个数;根据虚焊亮点的类型个数和和每个类型的第一个虚焊亮点的特征值获取太阳能电池板组件的虚焊程度值;本实施例通过对第二霍夫空间图像中的焊亮点进行筛除处理,获得了第二霍夫空间图像中的所有虚焊亮点,根据全部虚焊亮点可准确判断太阳能电池板组件的虚焊程度;通过本实施例的技术方案,解决了相关技术中,在对太阳能电池组件进行虚焊检测时检测精度低下,以及无法反映整体的虚焊程度的技术问题。
22.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1