基于模糊控制的压缩空气泡沫灭火系统模拟释放装置的制作方法
1.本发明及消防安全技术领域,具体来说是一种基于模糊控制的压缩空气泡沫灭火系统模拟释放装置。
背景技术:
2.压缩空气泡沫灭火技术具有灭火和降温效能好、覆盖效果好、节省耗水量等优点,可以克服传统灭火系统支管、喷头在爆炸和长时间燃烧时易损坏等不足,安全可靠性高。国外压缩空气泡沫灭火技术相对成熟,已在军事、机场、隧道等高价值领域推广应用,近年来,中国也开始自主研发相关技术,并在多所特高压换流站内应用该项消防新技术。
3.压缩空气泡沫灭火系统的泡沫产生装置与泡沫释放装置有一定的距离,这种设置可以避免泡沫产生装置受到火灾威胁。但这一设置导致压缩空气泡沫灭火剂产生后需要通过一段输送管网才能到底释放装置。压缩空气泡沫灭火系统中采用的压缩空气泡沫是三元两相混合流体,具有非牛顿流体的特性,由于输送管道阻力的影响,压缩空气泡沫在管道内的输送过程中其物理性质(如:体积、密度、粘度等)在不断变化。因此需要对喷出后的压缩空气泡沫进行检测,判断其是否仍然具备所需的灭火能力。
4.随着压缩空气泡沫灭火系统适用场景的变化,输送管网的长度、管径、排布组合方式等不同,通过释放装置喷出的压缩空气泡沫性能也会有所不同。目前对释放装置喷出后的压缩空气泡沫性能(如:发泡倍数、析液特性等)的研究均采用实验测量的方式,即对喷出后的压缩空气泡沫进行收集,经过测量计算分析后得到。如果需要对不同场景,不同输送管网条件下喷出后的压缩空气泡沫性能进行实验研究,则需要搭建不同的管网系统,这种方式会耗费大量人力物力,且搭建的管网难以将所需的各种场景全部覆盖。为解决上述压缩空气泡沫灭火系统管网排布多样,难以通过实验方式检测系统释放出的压缩空气泡沫性能的问题,本发明在模拟释放装置中设置多个不同规格的过滤片,通过安装的压力传感器对释放泡沫性能进行实时监测反馈,采用模糊控制的方式改变释放装置中过滤片种类和数量,模拟压缩空气泡沫通过不同管网输送的情况,实现对通过不同输送管网喷出的压缩空气泡沫性能的检测。
技术实现要素:
5.本发明所要解决的技术问题在于如何解决模拟装置与实际的压缩空气泡沫灭火系统释放压力一致。
6.本发明通过以下技术手段实现解决上述技术问题的:
7.一种基于模糊控制的压缩空气泡沫灭火系统模拟释放装置,包括通过管道依次串接的压缩空气泡沫模拟输送箱、压力传感器、泡沫喷淋释放单元;所述还包括过滤单元;所述过滤单元包括不同孔径的滤片,所述过滤单元向压缩空气泡沫模拟输送箱推入不同孔径的滤片;根据压力计算更换不同孔径的滤片和数量,使得模拟释放装置喷出的压缩空气泡沫状态与实际管道喷出的压缩空气泡沫状态一致;
8.所述压力计算方法具体为:
9.s01.按照所需测量实际管网的泡沫原液种类、气液比、压缩空气泡沫液流量、出口压力参数由泡沫产生装置产生压缩空气泡沫并输送至压缩空气泡沫模拟输送箱,并依次经过压力传感器、泡沫喷淋释放单元;
10.s02.采集压力传感器的压力值y1,并与实际管网的压力值y0进行差值计算,得到偏差e,偏差变化率ec(f)=[e(f)-e(f-1)]/t,其中e(f)为第f时测量计算得到的偏差,e(f-1) 为第f-1时测量计算得到的偏差,t为采集的周期;
[0011]
s03.设模糊集合论域x是{-n,-n+1,...0,...n-1,n},计算到量化因子ke=n/e和 k
ec
=n/ec;控制输出量u根据模糊控制规则进行模糊推理确定,其中比例因子ku=u/n,执行机构根据u调节相应的被控对象;所述被控对象为滤片,根据u更换不同孔径的滤片。
[0012]
本发明根据实验研究得到的压缩空气泡沫管网输送压力损失计算方法,可以计算得出压缩空气泡沫通过相应管网后的压力值,即为目标值。进一步计算该目标值与压力传感器采集到的实时压力值之间的差值,将该差值在输入接口中转化为数字信号,传输至模糊控制器中。进一步的,模糊控制器对该信号进行运算得出控制信号,并将该信号通过输出口转化为模拟量,最终送到执行器中进行相关调节操作,通过对以上环节的反复循环,实现通过本发明装置喷出的压缩空气泡沫状态与通过相应管网输运后状态一致。
[0013]
进一步的,所述步骤s03具体为:
[0014]
s031.量化因子及控制器的输入值:定义e是偏差值e的语言变量,ec是差值变化率ec的语言变量,输出的语言变量为u;在输入变量中,其范围的大小是:e=[e
l
,eh], ec=[ec
l
,ech],e
l
、ec
l
是低限量,eh、ech是高限量,所以量化因子定义分别是:其中m和n取值为正整数,控制器的输入值表达式为:
[0015][0016]
s032.模糊子集:采用x条的语言变化量描述变差e偏差变化率ec规则;
[0017]
s033.对输入语言值的描述:根据模糊子集的x级变化,得到e论域上的模糊子集 ai(i=1,2,3,4
……
x)是,ec论域上的模糊子集是bj(j=1,2,3,4
……
x);
[0018]
s033.输出语言变量:输出语言变量u的选论域上的子集ck(k=1,2,3,4
……
x);
[0019]
s034.建立模糊规则:if e is a
i and ec is b
j then u is ck;
[0020]
s035.一条语句决定一个模糊关系r,首先确定模糊规则的蕴含关系 (l=1,2,
···
,x2)如下:
[0021][0022][0023]
······
[0024]
[0025]
总的模糊关系为:
[0026]
进行模糊决策:用合成方法求模糊矢量值,第l条规则控制输出量为:
[0027][0028]
解模糊化:把输出模糊值u
l
转化为精确量u
l
,控制执行机构推入对应孔径的滤片。
[0029]
进一步的,所述x为7,既模糊子集分别为负大nb,负中nm,负小ns,零zo,正小ps,正中pm,正大pb。
[0030]
进一步的,所述过滤单元包括壳体;所述壳体与泡沫模拟输送箱相邻设置,在所述壳体与泡沫模拟输送箱之间的隔板上开有多道插接槽,在所述壳体底壁上设置有与插接槽位置和数量对应的多道轨道,所述轨道穿过隔板伸入泡沫模拟输送箱内;在每个轨道上均滑动配合有滤片,所述滤片在外力作用下穿过所述插接槽进入泡沫模拟输送箱,泡沫通过滤片进入泡沫液模拟输送箱的下游管道。
[0031]
进一步的,所述插接槽的两侧固定有密封条,所述密封条与滤片紧密抵接。
[0032]
进一步的,所述滤片的前进端和后退端厚度大于中间段,当滤片推入或抽出泡沫模拟输送箱时,前进端或后退端与插接槽的密封条紧密抵接。
[0033]
进一步的,所述滤片自中间段向前进端和后退端的厚度自然平缓过渡。
[0034]
进一步的,所述轨道有9条,平均分为三组,每组对应3个不同孔径的滤片。
[0035]
进一步的,在所述壳体内固定有驱动机构,每个所述滤片对应一个驱动机构,所述驱动机构驱动滤片前进或后退。
[0036]
进一步的,所述驱动机构为直线电机。
[0037]
本发明的优点在于:
[0038]
本发明根据实验研究得到的压缩空气泡沫管网输送压力损失计算方法,可以计算得出压缩空气泡沫通过相应管网后的压力值,即为目标值。进一步计算该目标值与压力传感器采集到的实时压力值之间的差值,将该差值在输入接口中转化为数字信号,传输至模糊控制器中。进一步的,模糊控制器对该信号进行运算得出控制信号,并将该信号通过输出口转化为模拟量,最终送到执行器中进行相关调节操作,通过对以上环节的反复循环,实现通过本发明装置喷出的压缩空气泡沫状态与通过相应管网输运后状态一致。
[0039]
本发明可以通过设置压缩空气泡沫模拟输送箱体内的过滤片数量和种类,模拟压缩空气泡沫通过不同管网系统输送后的压缩空气泡沫液状态,从而实现对不同输送距离、管道组合方式条件下系统喷出的压缩空气泡沫性能(泡沫发泡倍数、25%析液时间、泡沫覆盖强度、覆盖范围)的研究。
附图说明
[0040]
图1是本发明实施例所述一种基于模糊控制的压缩空气泡沫灭火系统模拟释放装置的结构示意图;
[0041]
图2是本发明实施例所述的压缩空气泡沫模拟输送箱体和连接管件的结构示意图;
[0042]
图3是本发明实施例所述的过滤片调节箱的结构示意图;
[0043]
图4是本发明实施例所述压缩空气泡沫模拟输送箱体和过滤片调节箱内部的过滤片的结构示意图;
[0044]
图5是本发明实施例中滤片与驱动机构的连接关系结构示意图;
[0045]
图6为本发明实施例中给出的两种喷头结构示意图;
[0046]
图7是发明实施例所述的模糊控制框图;
[0047]
图8是发明实施例所述的隶属度函数图。
具体实施方式
[0048]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0049]
本发明实施例提供一种基于模糊控制的压缩空气泡沫灭火系统模拟释放装置,参见图1-5,本压缩空气泡沫灭火系统模拟释放装置包括:链接管件、过滤单元、喷射释放单元和数据监测控制单元。
[0050]
如图1所示,按照泡沫流向,依次连接的有第一管道1、压缩空气泡沫模拟输送箱 2、第二管道15、压缩空气泡沫喷淋释放单元。压力传感器3串接在第二管道15上,可以实时测量该第二管道15的压力值。第一管道1将压缩空气泡沫模拟输送箱与压缩空气泡沫产生装置连接。
[0051]
本实施例中,泡沫模拟输送箱2为箱体结构,过滤单元与泡沫模拟输送箱2相邻设置。过滤单元包括壳体4;壳体4与泡沫模拟输送箱2相邻设置,在壳体与泡沫模拟输送箱之间的隔板11上开有多道插接槽12,在壳体底壁上设置有与插接槽12位置和数量对应的多道轨道6,轨道6与轨道5连接穿过隔板伸入泡沫模拟输送箱内;在每个轨道6上均滑动配合有滤片,滤片在外力作用下穿过插接槽12进入泡沫模拟输送箱,泡沫通过滤片进入泡沫液模拟输送箱的下游管道(第二管道15)。为了密封插接槽12,在插接槽12的两侧固定有密封条,密封条与滤片紧密抵接。还可以将滤片的前进端和后退端厚度大于中间段,当滤片推入或抽出泡沫模拟输送箱时,前进端或后退端由于厚度增加,可以与插接槽12的密封条更加紧密接触,达到密封效果,输送到本发明装置内的压缩空气泡沫只能进入压缩空气泡沫模拟输送箱2,无法进入壳体4内。如图4、图5所示,本实施例中滤片自中间段向前进端和后退端的厚度自然平缓过渡。
[0052]
本实施例中轨道5有9条,平均分为三组,每组对应3个不同孔径的滤片。如图4 所示,过滤片7共有九片三种不同类型,每种类似的过滤片的过滤孔的孔径和密度不同,分为三片细密度过滤片滤孔、三片中密度过滤片滤孔和三片粗密度过滤片滤孔 (图4中从右至左依次为细、中、粗密度过滤片),过滤片7位于壳体4内,可以通过扶手8手动推动过滤片或自动控制的方式,控制过滤片7通过轨道5进入压缩空气泡沫模拟输送箱2内的种类和个数。压缩空气泡沫通过不同类似和数量的过滤板时,其产生的流速、压力等变化情况也不同,因此通过控制压缩空气泡沫模拟输送箱2内过滤片7的数量和类型可以模拟压缩空气泡沫通过不同输送距离、管道组合方式后的输送状态。
[0053]
在壳体内固定有驱动机构,每个滤片对应一个驱动机构,驱动机构驱动滤片前进
或后退。驱动机构可以为9个,分别固定在壳体内,通过控制单元控制9个驱动机构启动,从而实现向泡沫模拟输送箱内推入不同孔径、不同数量的滤片,使得模拟释放装置喷出的压缩空气泡沫状态与实际管道喷出的压缩空气泡沫状态一致。驱动机构为直线电机,直线电机的输出端与滤片的退后端固定,带动滤片前进后退。
[0054]
压缩空气泡沫灭火系统模拟释放装置的工艺流程具体包括以下步骤:
[0055]
s1、安装装置:将本压缩空气泡沫灭火系统模拟释放装置的连接管件1与压缩空气泡沫产生装置连接,选择合适的泡沫喷射释放装置与连接管件15连接。设置所需测量工况的泡沫原液种类,气液比,压缩空气泡沫液流量、出口压力等参数,由产生装置产生的压缩空气泡沫通过输送管道1流入压缩空气泡沫模拟输送箱2,随着压缩空气泡沫通过各个过滤片7,压缩空气泡沫的流速降低,同时压力损失增大,缓慢流出压缩空气泡沫模拟输送箱,通过第二管道15输运至喷射释放装置(13或14)喷出,如图6所示的两种喷射方式,并确定各个连接处密封完整无泄漏。
[0056]
s2、确定目标值与测量值的偏差:等待达到压缩空气泡沫稳定喷出状态后,即压力传感器3在10秒内的压力测量值上下浮动范围不超过10%,记录该过滤片设置情况下的测量压力值y1。通过前人的相关计算方法得到通过目标管网输送后的压力值即为目标值y0,进一步的,用目标值y0减去测量压力值y1得到偏差e。本实施例的压力传感器测量范围为0~1.0mpa,精度为0.075%,输出信号为直流4~20ma,实时反馈压缩空气泡沫模拟输送箱体输出管网的实时压力值。
[0057]
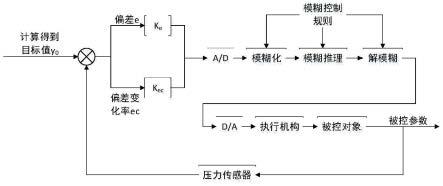
s3、被控参数:图7是本发明实施例中模糊控制框图,其控制流程为:根据传感器检测被控参数实际值y1与系统监控参数目标值y0,计算得到偏差e(f)及偏差变化率 ec(f)=[e(f)-e(f-1)]/t,其中e(f)为第f时测量计算得到的偏差,e(f-1)为第f-1时测量计算得到的偏差,t为采集的周期。设模糊集合论域x是{-n,-n+1,...0,...n-1,n},计算到量化因子ke=n/e和k
ec
=n/ec。控制输出量u根据模糊控制规则进行模糊推理确定,其中比例因子ku=u/n,执行机构根据u调节相应的被控对象(被控对象既滤片)。
[0058]
s4、量化因子及控制器的输入值:定义e是差值e的语言变量,ec是差值变化率 ec的语言变量,输出的语言变量为u。在输入变量中,其范围的大小是:e=[e
l
,eh], ec=[ec
l
,ech],e
l
、ec
l
是低限量,eh、ech是高限量,所以量化因子定义分别是:其中m和n取值为正整数,其取值与控制的精度有关。控制器的输入值表达式为:
[0059]
s5、模糊子集:用7个语言变化量描述偏差e和偏差变化率ec规则,模糊子集分别为nb(负大),nm(负中),ns(负小),z(零),ps(正小),pm(正中),pb (正大)。
[0060]
s6、对输入语言值的描述:模糊子集对应7级变化,语言变量e的论域是{-3,-2,
ꢀ‑
1,0,1,2,3},ai(i=1,2,3,4,5,6,7)是论域上的模糊子集。语言变量ec 的论域是{-3,-2,-1,0,1,2,3},论域上的模糊子集是bj(j=1,2,3,4,5,6, 7),根据试验结果和专家经验,e、ec语言变量赋值表如表1-2所示,则可以得到隶属度函数如图8。
[0061]
表1语言变量e隶属度表
[0062][0063]
表2语言变量ec隶属度表
[0064][0065]
s7、输出语言变量:装置输出控制量u,语言变量u分7级,模糊子集表述为{nb, nm,ns,zo,ps,pm,pb}。输出语言变量u的选定域为{-3,-2,-1,0,1,2,3},论域上的子集ck(k=1,2,3,4,5,6,7)。控制动作表示为:“推入一个细密度过滤片”、“推入一个中密度过滤片”、“推入一个粗密度过滤片”、“保持当前滤片状态不变”、“推出一个粗密度过滤片”、“推出一个中密度过滤片”、“推出一个细密度过滤片”。表3为本装置的输出控制量的语言赋值表。
[0066]
表3语言变量u隶属度表
[0067][0068]
s8、建立模糊规则:本文采用if e is a
i and ec is b
j then u is ck模糊语句表示,,共构成49条模糊语句,其中i,j,k=1,2,3,4,5,6,7。ai、bj、ck是模糊条件语句中与e、ec、u所对应的语言值。模糊控制规则表如表4所示。
[0069]
表4模糊控制规则表
[0070][0071]
s9、进行模糊推理:通常一条语句决定一个模糊关系r,本实施例采用的示 mandani极小运算方法,首先确定模糊规则的蕴含关系(l=1,2,
···
,49)如下:
[0072][0073][0074]
······
[0075][0076]
总的模糊关系为:
[0077]
s10、进行模糊决策:用合成方法求模糊矢量值,第l条规则控制输出量为:
[0078][0079]
s11、解模糊化:把输出模糊值u
l
转化为精确量u1,对执行机构进行控制。
[0080]
s12、实验结束后对管路和装置进行冲洗,并排空管道和装置内的液体,准备下次实验。
[0081]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1