一种格里森弧齿锥齿轮精确建模的方法
1.本发明涉及齿轮加工领域,具体地说是一种格里森弧齿锥齿轮精确建模的方法。
背景技术:
2.如今,格里森弧齿锥齿轮的建模方式大都是先求出齿顶线上的离散点(近似值),再通过这些离散点(近似值)拟合成曲线当作引导线建模。但这种齿顶线的求解方法复杂而且有误差,就会导致建模有误差。齿顶线求解方法是通过建立合理的坐标系,构建出齿坯和切齿刀具的数学模型,分别写出齿坯和内、外刀片切削刃轨迹面在不同坐标系下的数学方程;通过空间坐标变换矩阵,可将方程统一到同一坐标系下;两方程联立,进而分别得到内、外齿顶线方程,然后通过数值求解的方法从而得到齿顶线上一系列点的坐标。但是这些点的坐标不一定同时满足都在齿坯和刀片切削刃上,导致后续还需要逐点优化,直至找到满足同时在齿坯和刀片切削刃上的点坐标。该方法求解过程复杂,在数值求解和逐点优化过程中不易找出同时满足条件的点。
3.所以基于以上情况,本发明提出一种格里森弧齿锥齿轮精确建模的方法,从格里森弧齿锥齿轮的节锥出发研究,反推齿顶线,得到关于齿顶线的参数化方程,求解过程相对简便,不仅避免了数值求解和逐点优化,而且还避免了盘铣刀刃宽对求解过程的影响,利于模型的精确构建。
技术实现要素:
4.本发明的目的在于提出一种格里森弧齿锥齿轮精确建模的方法,以解决齿顶线求解方法大都是曲面求交方法,通过对齿面方程和齿顶面方程的推导,得出齿顶线的数值方程,此方法对于求解齿顶棱线要求较高,求解过程复杂,结果不精确的问题。
5.为实现上述目的,本发明提供以下技术方案:
6.一种格里森弧齿锥齿轮精确建模的方法,主要包括求解凹凸面齿顶线方程和格里森弧齿锥齿轮建模两部分。
7.其中所述求解凹凸面齿顶线方程主要包括以下内容:
8.①
根据刀盘和刀位点的位置求解节锥线(引导线)上任意一点对应的圆心角为θi及其对应的螺旋角为βi。
9.②
根据三角形的余弦定理和万能公式求解节锥线上(引导线)上任意一点的节锥距li,继而求解出节锥线方程。
10.③
通过对节锥与面锥齿顶高度、轴向高度差、齿线与棱线之间的转角的计算,求解出凹凸面齿顶棱线的方程。
11.所述格里森弧齿锥齿轮建模主要包括以下步骤:
12.s1、创建基本扫略曲线(节锥线),在ug中导入规律曲线xj,yj,zj并映射在节锥面上;
13.s2、创建大端截面当量圆柱齿轮4个基本圆和小端截面当量圆柱齿轮4个基本圆;
以o1为圆心,o1a为半径画齿顶圆,然后在这个平面上再继续画出其余三个基本圆(齿根圆、基圆、分度圆);小端上的画法和大端上一样;
14.s3、沿齿线的端平面创建大端渐开线齿槽廓和小端渐开线齿槽廓;(注意:需要将大端齿槽廓向外、小端齿槽廓向内沿齿向移动一定距离,保证后续布尔求差完整;)小端以o1为原点,o1a为x轴,在4个基本圆的平面内作o1a’垂直于o1a为y轴,根据三轴互相垂直的关系得到z轴,以此坐标系下导入渐开线规律曲线,然后根据所求摆角大小偏转渐开线并补齐渐开线起点到齿根圆的距离,然后关于o1a镜像得到左右两边的渐开线,最后修剪曲线得到小端端面;大端以o2为原点,o2b为x轴,在4个基本圆的平面内作o2b’垂直于o2b为y轴,根据三轴互相垂直的关系得到z轴,再以此坐标系下导入渐开线规律曲线,然后根据所求摆角大小偏转渐开线并补齐渐开线起点到齿根圆的距离,然后关于o2b镜像得到左右两边的渐开线,最后修剪曲线得到小端端面;
15.s4、在工件坐标系下,在ug表达式中输入上述计算出的齿顶左棱线方程和齿顶右棱线方程xc,yc,zc,用规律曲线插入两条紫色曲线;
16.s5、选择基本扫略曲线(红色)和两条规律曲线(紫色)作为引导线,扫略齿槽体;
17.s6、阵列齿槽体并用布尔求差的方法精确构建格里森弧齿锥齿轮。
18.与现有技术相比,本发明有益效果如下:
19.本发明方法推导出的齿顶棱线方程,求解过程相对简便,不仅避免了数值求解和逐点优化,而且还避免了盘铣刀刃宽对求解过程的影响,利于模型的精确构建。
20.凹凸面齿顶线求解出来后,可以作为除了节锥线(引导线)之外的引导线,更加保证建模的精确;格里森弧齿锥齿轮的精确建模为后续的齿顶倒棱的精确性提供了保障。
附图说明
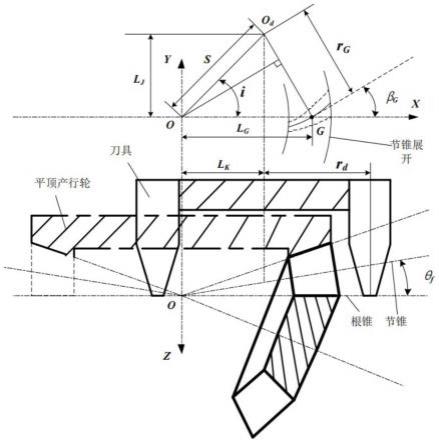
21.图1为本发明一种格里森弧齿锥齿轮精确建模的平顶产形轮切齿加工参数图;
22.图2为本发明一种格里森弧齿锥齿轮精确建模的节锥线上任一点螺旋角的大小βi图;
23.图3为本发明一种格里森弧齿锥齿轮精确建模的节锥线上任一点的锥距li图;
24.图4为本发明一种格里森弧齿锥齿轮精确建模的水平面下的θ和圆心角θi之间的关系图;
25.图5为本发明一种格里森弧齿锥齿轮精确建模的节锥和面锥之间对应的齿高h
aθ
图;
26.图6为本发明一种格里森弧齿锥齿轮精确建模的节锥和面锥之间对应的轴向高度差hz图;
27.图7为本发明一种格里森弧齿锥齿轮精确建模的齿顶线与节锥线之间的摆角图;
28.图8为本发明一种格里森弧齿锥齿轮精确建模的步骤一示意图;
29.图9为本发明一种格里森弧齿锥齿轮精确建模的步骤二示意图;
30.图10为本发明一种格里森弧齿锥齿轮精确建模的步骤三示意图;
31.图11为本发明一种格里森弧齿锥齿轮精确建模的步骤四示意图;
32.图12为本发明一种格里森弧齿锥齿轮精确建模的步骤五示意图之一;
33.图13为本发明一种格里森弧齿锥齿轮精确建模的步骤五示意图之二;
34.图14为本发明一种格里森弧齿锥齿轮精确建模的步骤六示意图之一;
35.图15为本发明一种格里森弧齿锥齿轮精确建模的步骤六示意图之二;
36.图中:o是机床摇台回转中心点,od是铣刀盘的回转中心点,m点为假想齿线的中点,lk为刀位水平坐标,lj为刀位垂直坐标,βg为中点螺旋角,la为前节锥距,lb为后节锥距,b为格里森弧齿锥齿轮的齿宽,齿顶角θa,面锥角δa,节锥角δ,大端处齿顶高ha,rb为基圆半径,r为分度圆半径,ra为齿顶圆半径,α
t
为格里森弧齿锥齿轮法面压力角,α
t
为格里森弧齿锥齿轮端面压力角。
具体实施方式
37.为阐明技术问题、技术方案、实施过程及性能展示,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释。本发明,并不用于限定本发明。以下将参考附图详细说明本公开的各种示例性实施例、特征和方面。附图中相同的附图标记表示功能相同或相似的元件。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
38.在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。
39.另外,为了更好的说明本公开,在下文的具体实施方式中给出了众多的具体细节。本领域技术人员应当理解,没有某些具体细节,本公开同样可以实施。在一些实例中,对于本领域技术人员熟知的方法、手段、元件和电路未作详细描述,以便于凸显本公开的主旨。
40.实施例1
41.一种格里森弧齿锥齿轮精确建模的方法,其建模方法步骤如下:
42.1)求解凹凸面齿顶线方程
43.如图1所示,o是机床摇台回转中心点,od是铣刀盘的回转中心点,m点为假想齿线的中点,lk为刀位水平坐标,lj为刀位垂直坐标,βg为中点螺旋角。由图可求ood与x轴之间的角度i和ood的距离s。
44.如图2所示,把格里森弧齿锥齿轮的节锥展开使之成为平面。x1轴指向节锥线ab的起点a,y1轴指向水平面。节锥线ab上的任意一点对应的圆心角为θi,由图可求任意一点的螺旋角βi。
45.如图3所示,la为前节锥距,lb为后节锥距,b为格里森弧齿锥齿轮的齿宽。在δo1god和δo1cod中,由余弦定理的知识可求得关于li的一元二次方程,用求根公式求出li的长度。
46.如图4所示,rj为节锥大端处的底面半径。由弧长=圆心角*半径的定理,可求得θi和θ之间的关系,继而求得βi、li分别与θ之间的关系。
47.在图2的坐标系下建立节锥线方程,以θ为变量求解出关于节锥线的方程xj,yj,zj。
48.如图5所示,根据齿顶角θa,面锥角δa,节锥角δ,大端处齿顶高ha,任意一点节锥距l
θ
可求出齿高h
aθ
。
49.如图6所示,由图可求得节锥和面锥之间对应的轴向高度差hz。
50.如图7所示,这是从格里森弧齿锥齿轮端面的当量圆柱齿轮。rb为基圆半径,r为分度圆半径,ra为齿顶圆半径,α
t
为格里森弧齿锥齿轮法面压力角,α
t
为格里森弧齿锥齿轮端
面压力角根据齿厚公式可以求得的大小,根据渐开线性质,可以求得棱线摆角由于计算出来的摆角大小不是基于图2的坐标系下的摆角大小,我们先通过齿廓端面上的摆角大小计算出各个齿廓端面上的两侧齿顶点的坐标,再根据以下坐标变换矩阵计算得出基于图2坐标系下的两侧齿顶点坐标xc,yc,zc。
51.已知点p在旧坐标系σ1[o1:x1,y1,z1]中的坐标为(x1,y1,z1),σ1的原点在新坐标系σ2[o2:x2,y2,z2]中的坐标为(x
20
,y
20
,z
20
),,则点p在σ2中的坐标(x2,y2,z2)如下所示:
[0052][0053]
则有
[0054][0055]
称m
21
为由旧坐标系σ1[o1:x1,y1,z1]的点到新坐标系σ2[o2:x2,y2,z2]的点的坐标变换矩阵。
[0056]
式中
[0057]a11
、a
12
、a
13
——新坐标的x2轴分别与旧坐标系的三根轴夹角的余弦;
[0058]a21
、a
22
、a
23
——新坐标的x2轴分别与旧坐标系的三根轴夹角的余弦;
[0059]a31
、a
32
、a
33
——新坐标的x2轴分别与旧坐标系的三根轴夹角的余弦;
[0060]
若坐标系σ0到坐标系σ1的坐标变换矩阵为m
10
,坐标系σ1到坐标系σ2的坐标变换矩阵为m
21
,则由坐标系σ0到坐标系σ2的坐标变换矩阵为m
20
=m
21m10
。
[0061]
2)格里森弧齿锥齿轮建模方法具体包括以下步骤:
[0062]
s1、如图8所示:创建基本扫略曲线(节锥线)。在ug中导入规律曲线xj,yj,zj并映射在节锥面上。
[0063]
s2、如图9所示:创建大端截面当量圆柱齿轮4个基本圆和小端截面当量圆柱齿轮4个基本圆。以o1为圆心,o1a为半径画齿顶圆,然后在这个平面上再继续画出其余三个基本圆(齿根圆、基圆、分度圆)。小端上的画法和大端上一样。
[0064]
s3、如图10所示:沿齿线的端平面创建大端渐开线齿槽廓和小端渐开线齿槽廓。(注意:需要将大端齿槽廓向外、小端齿槽廓向内沿齿向移动一定距离,保证后续布尔求差完整。)小端以o1为原点,o1a为x轴,在4个基本圆的平面内作o1a’垂直于o1a为y轴,根据三轴互相垂直的关系得到z轴,以此坐标系下导入渐开线规律曲线,然后根据所求摆角大小偏转渐开线并补齐渐开线起点到齿根圆的距离,然后关于o1a镜像得到左右两边的渐开线,最后修剪曲线得到小端端面。大端以o2为原点,o2b为x轴,在4个基本圆的平面内作o2b’垂直于o2b为y轴,根据三轴互相垂直的关系得到z轴,再以此坐标系下导入渐开线规律曲线,然后根据所求摆角大小偏转渐开线并补齐渐开线起点到齿根圆的距离,然后关于o2b镜像得到
左右两边的渐开线,最后修剪曲线得到小端端面。
[0065]
s4、如图11所示:在工件坐标系下,在ug表达式中输入上述计算出的齿顶左棱线方程和齿顶右棱线方程xc,yc,zc,用规律曲线插入两条紫色曲线。
[0066]
s5、如图12和图13所示:选择基本扫略曲线(红色)和两条规律曲线(紫色)作为引导线,扫略齿槽体。
[0067]
s6、如图14和图15所示:阵列齿槽体并用布尔求差的方法精确构建格里森弧齿锥齿轮。
[0068]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1